0197786-01_BA_HeadVerification_708_DE.pdf - 第62页
SIPLACE „Head Ver ification“ Bedienungsanleitun g Ausgabe 01/2015 62 4.11.2 Erklärung des Messergebnisses im Menü Progress Nach Beendigung der Messung ersc heint im Menü Progress folgendes Ergeb nis: Abbildung 41 : Ergeb…

SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
61
Ablauf der Messung im Detail:
1. Zuerst wird der Kopf über die Höhenreferenzlaufposition an der Transportwange positioniert.
2. Segment 1 wird mit dem Verfahrprofil TP5 [TP5 LIGHT BARRIER] nach unten positioniert.
Das Segment hat den Dreh-Winkel 0°.
3. Während der Abwärtsbewegung wird der BE-Sensor überwacht.
Sobald der BE-Sensor von der Pipettenspitze unterbrochen wurde, wird dieser Wert als CS
pos 1 [µm] gespeichert. Dies ist nun der Wert für den Weg der Z-Achse, wenn die Pipette am
Segment 1 mit 0° den BE-Sensor unterbricht.
4. Wenn die Pipette auf die Höhenreferenzlaufposition der Transportwange trifft, wird die Feder
im Segment komprimiert und die Lichtschranke Z-Unten wird vom Schaltring betätigt. Dieses
Position wird als Endemeldung ausgegeben. Der Wert wird als Measure 1 [µm] für Segment
1 mit 0° gespeichert
5. Segment 1 wird mit dem Verfahrprofil TP1 nach oben gefahren.
6. Segment 1 wird um 60° gedreht 60° absolut
7. Segment 1 wird erneut mit dem Verfahrprofil TP5 [TP5 LIGHT BARRIER] nach unten
positioniert. Das Segment hat den Dreh-Winkel 60°.
8. Während der Abwärtsbewegung wird der BE-Sensor überwacht.
Sobald der BE-Sensor von der Pipettenspitze unterbrochen wurde, wird dieser Wert als CS
pos 2 [µm] gespeichert. Dies ist nun der Wert für den Weg der Z-Achse, wenn die Pipette am
Segment 1 mit 60° den BE-Sensor unterbricht.
9. Wenn die Pipette auf die Höhenreferenzlaufposition der Transportwange trifft, wird die Feder
im Segment komprimiert und die Lichtschranke Z-Unten wird vom Schaltring betätigt. Dieses
Position wird als Endemeldung ausgegeben. Der Wert wird als Measure 2 [µm] für Segment
1 mit 60° gespeichert
10. Segment 1 wird mit dem Verfahrprofil TP1 nach oben gefahren.
11. Segment 1 wird nochmals um 60° gedreht 120° absolut
12. Jetzt werden die Sequenzen 2.-5. nochmal durchlaufen.
13. Dies wird für die weiteren absoluten Winkel 180° / 240° / 300° / 360° ebenfalls wiederholt.
14. Am Ende ergeben sich für das Segment 1 folgende Messwerte
Drehwinkel 0° BE-Sensorwert CS pos 1 [µm] & Z-Down LS Measure 1 [µm]
Drehwinkel 60° BE-Sensorwert CS pos 2 [µm] & Z-Down LS Measure 2 [µm]
Drehwinkel 120° BE-Sensorwert CS pos 3 [µm] & Z-Down LS Measure 3 [µm]
Drehwinkel 180° BE-Sensorwert CS pos 4 [µm] & Z-Down LS Measure 4 [µm]
Drehwinkel 240° BE-Sensorwert CS pos 5 [µm] & Z-Down LS Measure 5 [µm]
Drehwinkel 300° BE-Sensorwert CS pos 6 [µm] & Z-Down LS Measure 6 [µm]
Somit hat man für eine komplette Segmentdrehung im Abstand von jeweils 60°
Messergebnisse.
15. Nun werden die Sequenzen 2.-14. für alle weiteren Segmente durchgeführt.
SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
62
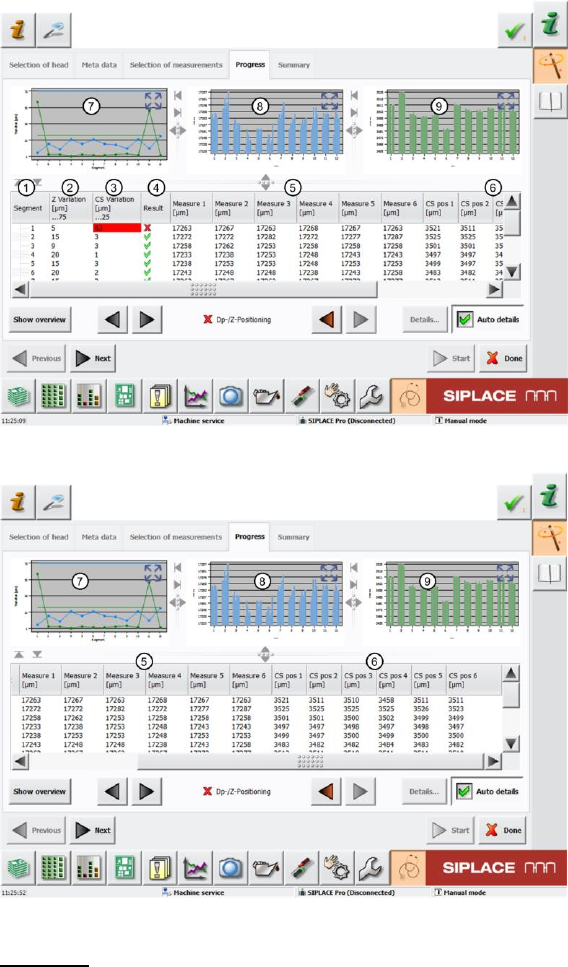
4.11.2 Erklärung des Messergebnisses im Menü Progress
Nach Beendigung der Messung erscheint im Menü Progress folgendes Ergebnis:
Abbildung 41: Ergebnis DP-Z-Positioning_1
Abbildung 42: Ergebnis DP-Z-Positioning_2
Legende:
1. Gemessenes Segment
2. Ermittelter Wert Z Variation [µm] Dieser Wert errechnet sich aus der Differenz zwischen
dem minimalen und dem maximalen Wert der Measure 1 – Measure 6 (Endemeldung
Lichtschranke Z-Unten).
Z Variation [µm] = Maximaler Wert Measure 1-6 [µm] – Minimaler Wert Measure 1-6 [µm]
Der Wert Z Variation [µm] zeigt die Varianz der Endemeldung Lichtschranke Z-Unten in
Abhängigkeit vom Drehwinkel des Segments.
Der Wert Z Variation [µm] muss in einer plausiblen Toleranz (in unserem Fall 0..75µm) liegen.
Ist der Wert außerhalb der Toleranz, so kann eine exakte Bestückung bei jedem Winkel nicht
garantiert werden.
3. Ermittelter Wert CS Variation [µm] Dieser Wert errechnet sich aus der Differenz zwischen
dem minimalen und dem maximalen Wert der CS pos 1 – CS pos 6 (Unterbrechung des BE-
Sensor).
CS Variation [µm] = Maximaler Wert CS pos 1-6 [µm] – Minimaler Wert CS pos 1-6 [µm]
Der Wert CS Variation [µm] zeigt die Varianz der BE-Sensor CS pos 1-6 in Abhängigkeit vom
Drehwinkel des Segments.
SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
63
Der Wert CS Variation [µm] muss in einer plausiblen Toleranz (in unserem Fall 0..25µm)
liegen.
Ist der Wert außerhalb der Toleranz, so kann eine exakte Bestückung bei jedem Winkel nicht
garantiert werden.
4. Ergebnis-Anzeige (OK grüner Hacken / NOK rotes X)
5. Die Werte Measure 1 [µm] – Measure 6 [µm] ergeben sich wie folgt:
Drehwinkel 0° Lichtschranke Z-Unten Measure 1 [µm]
Drehwinkel 60° Lichtschranke Z-Unten Measure 2 [µm]
Drehwinkel 120° Lichtschranke Z-Unten Measure 3 [µm]
Drehwinkel 180° Lichtschranke Z-Unten Measure 4 [µm]
Drehwinkel 240° Lichtschranke Z-Unten Measure 5 [µm]
Drehwinkel 300° Lichtschranke Z-Unten Measure 6 [µm]
6. Die Werte CS pos 1 [µm] – CS pos 6 [µm] ergeben sich wie folgt:
Drehwinkel 0° BE-Sensorwert CS pos 1 [µm]
Drehwinkel 60° BE-Sensorwert CS pos 2 [µm]
Drehwinkel 120° BE-Sensorwert CS pos 3 [µm]
Drehwinkel 180° BE-Sensorwert CS pos 4 [µm]
Drehwinkel 240° BE-Sensorwert CS pos 5 [µm]
Drehwinkel 300° BE-Sensorwert CS pos 6 [µm]
7. In diesem Diagramm werden die Werte Variation [µm] (2) der Segmente dargestellt.
Blaue Linie Z Variation [µm]
Grüne Linie CS Variation [µm]
8. In diesem Diagramm werden die Werte der Segmente für Measure1 – Measure6
veranschaulicht.
Blaue Balken jeweils ein Balken für Measure1(0°) – Measure6 (300°)
Wenn die Lichtschranke Z-Unten zuverlässig arbeitet, sollten die
Balken im Idealfall etwa gleich hoch sein oder keine zu große Varianz
zu den anderen Segmenten darstellen.
1. In diesem Diagramm werden die Werte der Segmente für CS pos 1 – CS pos 6
veranschaulicht.
Grüne Balken jeweils ein Balken für Measure1(0°) – Measure6 (300°)
Wenn der BE-Sensor zuverlässig arbeitet, sollten die Balken im
Idealfall etwa gleich hoch sein oder keine zu große Varianz zu den
anderen Segmenten darstellen.