0197786-01_BA_HeadVerification_708_DE.pdf - 第78页
SIPLACE „Head Ver ification“ Bedienungsanleitun g Ausgabe 01/2015 78 4.15.2 Erklärung des Messergebnisses im Menü Progress Nach Beendigung der Mes sung erscheint im Menü Progress f olgendes Ergebnis: Abbildung 54 : Ergeb…
SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
77
7. Das Segment 1 wird mit der Z-Achse nach unten gefahren und legt das Kalibrierteil wieder mit
0° (Winkel DP/Segment) und den ermittelten korrigierten Offsetwerten Up X [µm] und Up Y
[µm] als Bestückposition in der Kalibrierteilablage ab
8. Die Leiterplattenkamera fährt über das Kalibrierteil und ermittelt erneut, anhand der vier
Punkte in den Kalibrierteilecken, die exakte Lage des Kalibrierteiles in der Kalibrierteilablage.
Es ergeben sich Offsetwerte Down X [µm] und Down Y [µm], welche die Aussermittigkeit des
Kalibrierteiles zur Leiterplattenkameramitte beschreiben. Dieser Wert beschreibt genau den
Offset der Segmentmitte von Segment 1 bei einem Bestückwinkel von 0°, wenn das Segment
1 in der Bestückposition ist. Somit hat man einen exakten Verzug des Segment 1 bei einem
Bestückwinkel von 0° ermittelt, der beschreibt, wie sehr die Z-Linearführung die Position von
Segment oben nach Segment unten verändert. Die Abweichung beschreibt auch den Offset
der Baueelementekamera zur Leiterplattenkamera für dieses Segment.
9. Die ermittelte Kalibrierteilposition der vormaligen Messung wird wieder als Istposition
(Abholposition) für die folgende Messung verwendet.
10. Nun holt erneut Segment 1 mit 90° ab.
11. Segment 1 wird hochgefahren und dann mithilfe des Sterns unter die Bauelementekamera
gedreht.
12. Die Bauelementekamera ermittelt durch Vermessen der vier Kalibrierteilstrukturmarken exakt
die Position des Kalibrierteils zur Kameramitte. Die hier ermittelten Offsetwerte werden mit Up
X [µm] und Up Y [µm] gespeichert. Dieser Wert beschreibt nun die Aussermittigkeit des
Kalibrierteiles zur Kameramitte. Dieser Wert ergibt nun den Segment Offset up für das
Segment 1 bei 90°, da man ja davon ausgeht, dass aufgrund der Messung Abholposition das
Segment 1 exakt das Kalibrierteil in der Mitte abgeholt hat.
13. Der Stern dreht das Segment mit dem Kalibrierteil wieder zurück in die Bestückposition.
14. Das Segment 1 wird mit der Z-Achse nach unten gefahren und legt das Kalibrierteil wieder mit
90° (Winkel DP/Segment) und den ermittelten korrigierten Offsetwerten Up X [µm] und Up Y
[µm] als Bestückposition in der Kalibrierteilablage ab.
15. Die Leiterplattenkamera fährt über das Kalibrierteil und ermittelt nun erneut anhand der vier
Punkte in den Kalibrierteilecken die exakte Lage des Kalibrierteiles in der Kalibrierteilablage.
Es ergeben sich Offsetwerte Down X [µm] und Down Y [µm], welche die Aussermittigkeit des
Kalibrierteiles zur Leiterplattenkameramitte beschreiben. Dieser Wert beschreibt genau den
Offset der Segmentmitte von Segment 1 bei einem Bestückwinkel von 90°, wenn das
Segment 1 in der Bestückposition ist. Somit hat man einen exakten Verzug des Segment 1 bei
einem Bestückwinkel von 90° ermittelt, der beschreibt, wie sehr die Z-Linearführung die
Position von Segment oben nach Segment unten verändert. Die Abweichung beschreibt auch
den Offset der Baueelementekamera zur Leiterplattenkamera für dieses Segment.
16. Die ermittelte Kalibrierteilposition der vormaligen Messung wird wieder als Istposition
(Abholposition) für die folgende Messung verwendet.
17. Jetzt wiederholen sich die Messschritte für Segment 1 mit den DP-Winkel 180° und 270°
18. Diese ermittelten Werte für Segment 1 Down X [µm] und Down Y [µm] werden als Absolut 0
für alle weiteren Berechnungen aller Segmentoffsets verwendet. Der Segment offset down für
Segment 1 ist der Bezugswert, da alle anderen Segmentoffsets aller Segmente sich auf
diesen Ausgangwert beziehen.
19. Danach werden die kompletten Mess-Schritte für alle weiteren Segmente mit den Winkel 0°,
90°, 180° und 270° durchlaufen.
20. Das Kalibrierteil bleibt während der gesamten Segment-offset Messung mit 0° liegen, es
verändert seinen Winkel nicht! Die vermessenen Winkel beziehen sich auf den Winkel der DP,
mit dem das Kalibrierteil von der DP abgeholt wird
SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
78
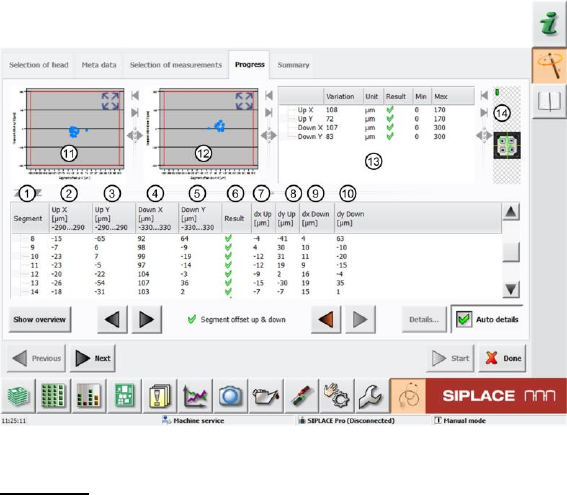
4.15.2 Erklärung des Messergebnisses im Menü Progress
Nach Beendigung der Messung erscheint im Menü Progress folgendes Ergebnis:
Abbildung 54: Ergebnis Segment offset up and down
Legende:
1. Gemessenes Segment
2. Errechneter Segmentoffset Oben-Mittelwert Up X [µm] aus den Winkelmessung 0°, 90°, 180°
und 270°. Diese Abweichung wird im Wert dx Up [µm] (7) als tatsächlicher gemessener
Segmentoffset zur Bauelementekamera-Mitte ermittelt. Der kalkulierte Segmentoffset Oben
Wert Up X [µm] ergibt sich dann rechnerisch aus dem Mittelwert der Offsets bei den Winkeln
0°, 90°, 180° und 270° zwischen Bauelemente- und Leiterplattenkamera.
Die ermittelten Segmentoffsetwerte Up X [µm] müssen immer in einem bestimmten
Toleranzbereich (in unserem Beispiel -290..290µm) liegen. Dieser Wert definiert einen
zulässigen Segmentoffset innerhalb der Konstruktions- und Fertigungstoleranzen, welche die
Software noch kompensieren kann. Liegt der ermittelte Segmentoffsetwert außerhalb der
Toleranzen, so kann davon ausgegangen werden, dass auf das Segment eine mechanische
Verformung gewirkt hat, somit das Segment verbogen ist und nicht mehr genau damit
Bestückt werden kann.
3. Errechneter Segmentoffset Oben-Mittelwert Up Y [µm] aus der Winkelmessung 0°, 90°, 180°
und 270°. Diese Abweichung wird im Wert dy Up [µm] (8) als tatsächlicher gemessener
Segmentoffset zur Bauelementekamera-Mitte ermittelt. Der kalkulierte Segmentoffset Oben
Wert Up Y [µm] ergibt sich dann rechnerisch aus dem Mittelwert der Offsets bei den Winkeln
0°, 90°, 180° und 270° zwischen Bauelemente- und Leiterplattenkamera.
Die ermittelten Segmentoffsetwerte Up Y [µm] müssen immer in einem bestimmten
Toleranzbereich (in unserem Beispiel -290..290µm) liegen. Dieser Wert definiert einen
zulässigen Segmentoffset innerhalb der Konstruktions- und Fertigungstoleranzen, welche die
Software noch kompensieren kann. Liegt der ermittelte Segmentoffsetwert außerhalb der
Toleranzen, so kann davon ausgegangen werden, dass auf das Segment eine mechanische
Verformung gewirkt hat, somit das Segment verbogen ist und nicht mehr genau damit
Bestückt werden kann.
4. Errechneter Segmentoffset Unten Mittelwert Down X [µm] aus der Winkelmessung 0°, 90°,
180° und 270°. Dieser Wert ergibt sich aus dem tatsächlichen Segmentoffset Unten-Mittelwert
dx Down [µm] für dieses Segment. Dieser Offset wird im Wert dx Down [µm] (9) abgebildet.
Die ermittelten Segmentoffsetwerte Down X [µm] müssen immer in einem bestimmten
Toleranzbereich (in unserem Beispiel -330..330µm) liegen. Dieser Wert definiert einen
zulässigen Segmentoffset innerhalb der Konstruktions- und Fertigungstoleranzen, welche die
Software noch kompensieren kann. Liegt der ermittelte Segmentoffsetwert außerhalb der
Toleranzen, so kann davon ausgegangen werden, dass auf das Segment eine mechanische
Verformung gewirkt hat, somit das Segment verbogen ist und nicht mehr genau damit
Bestückt werden kann.
Der Wert für Down X [µm] für Segment 1 wird als Bezugswert für alle weiteren Segmente
verwendet und wird deshalb immer mit 0 gesetzt.

SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
79
Weil der Segment Offset Unten für Segment 1 der Bezugswert für alle weiteren
Segmentoffsets verwendet wird, setzt man den tatsächlichen Segmentoffsetwert dx Down
[µm] als Wert 0 für Down X [µm] = 0!
Für die Beziehung aller weiteren Segmente wird mit der Formel
Down X [µm] Seg (n) = dx Down [µm] Seg (n) - dx Down [µm] Seg 1
errechnet.
5. Errechneter Segmentoffset Unten Mittelwert Down Y [µm] aus der Winkelmessung 0°, 90°,
180° und 270°. Dieser Wert ergibt sich aus dem tatsächlichen Segmentoffset Unten-Mittelwert
dy Down [µm] für dieses Segment. Dieser Offset wird im Wert dy Down [µm] (10)
abgebildet.
Die ermittelten Segmentoffsetwerte Down Y [µm] müssen immer in einem bestimmten
Toleranzbereich (in unserem Beispiel -330..330µm) liegen. Dieser Wert definiert einen
zulässigen Segmentoffset innerhalb der Konstruktions- und Fertigungstoleranzen, welche die
Software noch kompensieren kann. Liegt der ermittelte Segmentoffsetwert außerhalb der
Toleranzen, so kann davon ausgegangen werden, dass auf das Segment eine mechanische
Verformung gewirkt hat, somit das Segment verbogen ist und nicht mehr genau damit
Bestückt werden kann.
Der Wert für Down Y [µm] für Segment 1 wird als Bezugswert für alle weiteren Segmente
verwendet und wird deshalb immer mit 0 gesetzt.
Weil der Segment Offset Unten für Segment 1 der Bezugswert für alle weiteren
Segmentoffsets verwendet wird, setzt man den tatsächlichen Segmentoffsetwert dy Down
[µm] als Wert 0 für Down Y [µm] = 0!
Für die Beziehung aller weiteren Segmente wird mit der Formel
Down Y [µm] Seg (n) = dy Down [µm] Seg (n) - dy Down [µm] Seg 1
errechnet.
6. Ergebnis-Anzeige (OK grüner Hacken / NOK rotes X)
7. Tatsächlicher Segmentoffset-Mittelwert dx Up [µm] des jeweiligen Segments zur
Bauelementekameramitte bei den Winkel 0°, 90°, 180° und 270°.
8. Tatsächlicher Segmentoffset-Mittelwert dy Up [µm] des jeweiligen Segments zur
Bauelementekameramitte bei den Winkel 0°, 90°, 180° und 270°.
9. Tatsächlicher Segmentoffset-Mittelwert dx Down [µm] des jeweiligen Segments zur
Leiterplattenkameramitte bei den Winkel 0°, 90°, 180° und 270°.
10. Tatsächlicher Segmentoffset-Mittelwert dy Down [µm] des jeweiligen Segments zur
Leiterplattenkameramitte bei den Winkel 0°, 90°, 180° und 270°.
11. Diagramm zur Darstellung der Segmentoffsetwerte Oben mit folgenden Werten:
Abszissenachse (x-Achse) Segment offset up X [µm]
Ordinatenachse (y-Achse) Segment offset up Y [µm]
Rote Grenzlinien Toleranzen Min und Max (in unserem Fall -290..290µm)
Mit dem Button kann das Diagramm vergrößert werden.
12. Diagramm zur Darstellung der Segmentoffsetwerte Unten mit folgenden Werten:
Abszissenachse (x-Achse) Segment offset down X [µm]
Ordinatenachse (y-Achse) Segment offset down Y [µm]
Rote Grenzlinien Toleranzen Min und Max (in unserem Fall -330..330µm)
Mit dem Button kann das Diagramm vergrößert werden.
13. In diesem Screen werden folgende Werte dargestellt:
a. Streuung Up X Dieser Wert ermittelt sich aus der Differenz des kleinsten
Wert für Up X [µm] (2) und dem größten Wert für Up X [µm] (2). Die Differenz muss
innerhalb einer plausiblen Toleranz (in diesem Falle 0..220µm) liegen.
b. Streuung Up Y Dieser Wert ermittelt sich aus der Differenz des kleinsten
Wert für Up Y [µm] (3) und dem größten Wert für Up Y [µm] (3). Die Differenz muss
innerhalb einer plausiblen Toleranz (in diesem Falle 0..220µm) liegen.
c. Streuung Down X Dieser Wert ermittelt sich aus der Differenz des kleinsten Wert
für Down X [µm] (4) und dem größten Wert für Down X [µm] (4). Die Differenz muss
innerhalb einer plausiblen Toleranz (in diesem Falle 0..220µm) liegen.
d. Streuung Down Y Dieser Wert ermittelt sich aus der Differenz des kleinsten Wert
für Down Y [µm] (5) und dem größten Wert für Down Y [µm] (5). Die Differenz muss
innerhalb einer plausiblen Toleranz (in diesem Falle 0..220µm) liegen.
e. Ergebnis-Anzeige (OK grüner Hacken / NOK rotes X)