0197786-01_BA_HeadVerification_708_DE.pdf - 第82页
SIPLACE „Head Ver ification“ Bedienungsanleitun g Ausgabe 01/2015 82 4.15.4 Deutu ng der Ergebnisse Fehler bei Up X [µm] und Up Y [µm] an allen Segmenten: 1. Überprüf ung Sternnullpunk tkorr ektur Fehler bei Dow n X [µm]…
SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
81
Der Wert Variation Up X [µm] (2) veranschaulicht die maximale Streuung zwischen den Segmenten
bei Segmentoffset Up in X-Richtung.
Der Wert Variation Up X [µm] errechnet sich wie folgt:
Variation Up X [µm] = Up X max [µm] – Up X min [µm]
Variation Up X [µm] = 76µm – (-32µm) = |108µm|
Der Wert Variation Up Y [µm] (3) veranschaulicht die maximale Streuung zwischen den Segmenten
bei Segmentoffset Up in Y-Richtung.
Der Wert Variation Up Y [µm] errechnet sich wie folgt:
Variation Up Y [µm] = Up Y max [µm] – Up Y min [µm]
Variation Up Y[µm] = 7µm – (-65µm) = |72µm|
Der Wert Variation Down X [µm] (4) veranschaulicht die maximale Streuung zwischen den Segmenten
bei Segmentoffset Down in X-Richtung.
Der Wert Variation Down X [µm] errechnet sich wie folgt:
Variation Down X [µm] = Down X max [µm] – Down X min [µm]
Variation Down X [µm] = 107µm – 0µm = |107µm|
Der Wert Variation Down Y [µm] (4) veranschaulicht die maximale Streuung zwischen den Segmenten
bei Segmentoffset Down in Y-Richtung.
Der Wert Variation Down Y [µm] errechnet sich wie folgt:
Variation Down Y [µm] = Down Y max [µm] – Down Y min [µm]
Variation Down Y [µm] = 64µm – (-19µm) = |83µm|
Der Wert Down X [µm] der Segmente n+1 bezieht sich auf das Segment 1. Der tatsächlich
gemessene Segmentoffset für Segment 1 zur Leiterplattenkamera wird mit dx Down [µm] = -19µm
ermittelt. Der Wert -19µm wird als Bezugswert 0µm gesetzt und ergibt somit Down X [µm] = 0µm für
Segment 1.
Alle weiteren Segmentoffset Werte Down X [µm] werden in Abhängigkeit zum Bezugssegment 1
errechnet.
Dies geschieht mit der Formel:
Down X [µm] Seg (n) = dx Down [µm] Seg (n) - dx Down [µm] Seg 1
In unserem Beispiel (6) für Segment 8 errechnet sich der Wert Down X[µm] Seg 8 wie folgt:
Down X[µm] Seg 8 = 4µm – (-88µm) = 92µm
Der Wert Down Y [µm] der Segmente n+1 bezieht sich auf das Segment 1. Der tatsächlich
gemessene Segmentoffset für Segment 1 zur Leiterplattenkamera wird mit dy Down [µm] = 32µm
ermittelt. Der Wert 32µm wird als Bezugswert 0µm gesetzt und ergibt somit Down Y [µm] = 0µm für
Segment 1.
Alle weiteren Segmentoffset Werte Down Y [µm] werden in Abhängigkeit zum Bezugssegment 1
errechnet.
Dies geschieht mit der Formel:
Down Y [µm] Seg (n) = dy Down [µm] Seg (n) - dy Down [µm] Seg 1
In unserem Beispiel (7) für Segment 8 errechnet sich der Wert Down Y [µm] Seg 8 wie folgt:
Down Y [µm] Seg 8 = 63µm – (-1µm) = 64µm
SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
82
4.15.4 Deutung der Ergebnisse
Fehler bei Up X [µm] und Up Y [µm] an allen Segmenten:
1. Überprüfung Sternnullpunktkorrektur
Fehler bei Down X [µm] und Down Y [µm] an allen Segmenten:
1. Linearführung der Z-Achse locker oder defekt Überprüfen oder Tausch des Z-Motors
Fehler bei Up X [µm] / Up Y [µm] / Down X [µm] / Down Y [µm] an einzelnen Segmenten:
1. Segment verbogen, eventuell nach einem Crash Austausch Segment / DP
2. Linearführung DP/Segment ausgeschlagen Tausch der DP / Tausch der Linearführung des
Segments
SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
83
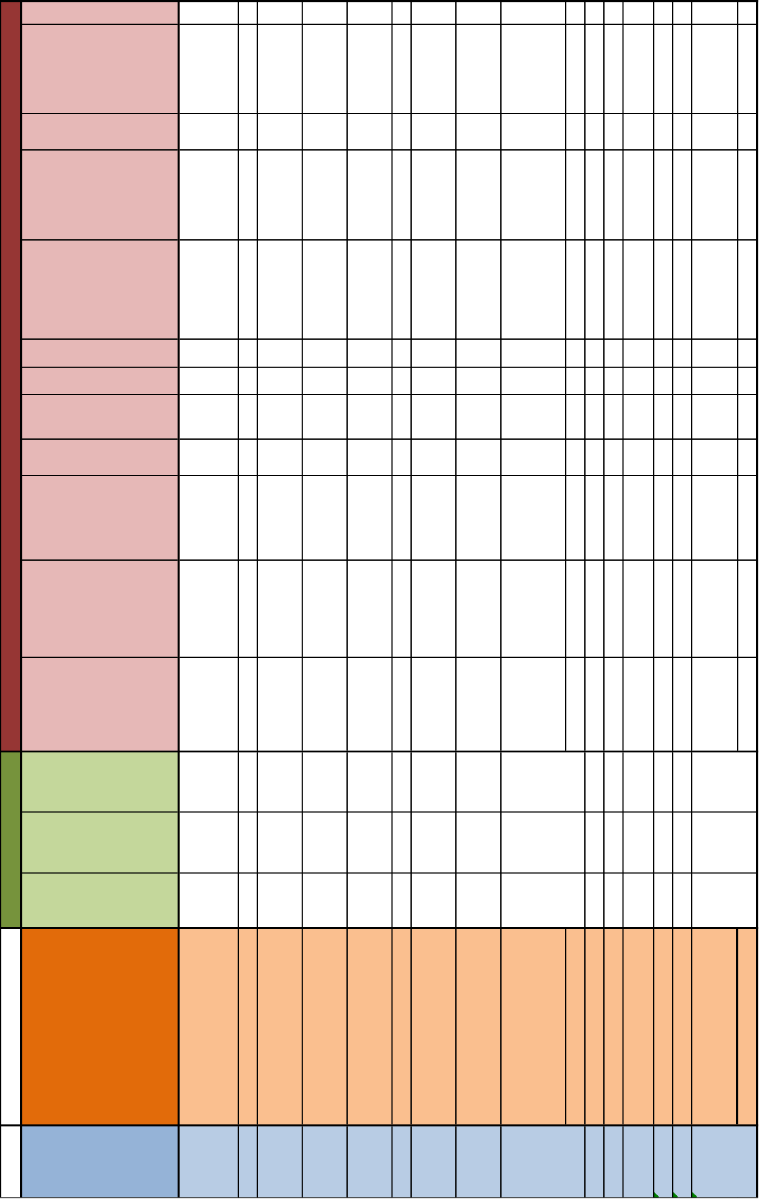
5 Matrix zur Ursachen- und Fehleranalyse
Abbildung 57: Fehler und Analyse Übersicht
Chapter Script´s CPP CP20P CP20A
Component sensor
(BE-Sensor)
DP Drive
Filterdisc
Preasureregulator Valve
Hoding Circuit
(Vacuum Hoses)
Placement Circuit
Star-Axis
Z-Axis
Lightbarrier Z-Down
Nozzle
(Nozzle seating)
Anti Glare Shield
Complete System
6.1 BE-Sensor voltage and z-heigths X X X
x
(if all segments are
effected)
x
(Ball bearing)
x
(if all segment
affected, tolerance in
the jaw)
6.2 Holding Circuit (sealed nozzle) X X X x x
6.3 Nozzle Spring X X X
x
(Spring force +
deflection way)
x
(Switch point light
barrier)
6.4 Z-Axis movement X X X
x
(Linear Guide)
x
(if all segment
affected, linear
x
6.5 Anti Glare Shield mounting x
x
(if all segments
affected)
x
6.6 Air & vacuum with head sensors X X X x x x
6.7 Head endurance run 01005 X X x
x
(Linear Guide, dp
rotation)
x x
x
(If all segment
affected, motor /
x x
6.8 Head endurance run LS X X X x
x
(Linear Guide, dp
rotation)
x x
x
(if all segments
affected)
x x x
Segment offset up (fast)
x
(Linear guide +
mounting
tolerance)
Segment offset down (fast) x x
6.10 Filter disc X x
6.11 Z/DP Positioning X x x x x
6.12 DP-Rotation test X X X
x
(DP rotation)
6.13 ZDS sensor values X x x
6.14 Component sensor calibration X x
Segment offset up
x
(Linear guide +
mounting tolerance)
Segment offset down x x
Headtype
Parts to be changed or analyzed
6.9
6.15
X
X
X
X