CX-1_机器控制参数.pdf - 第60页
R e v 2 . 0 0 机器控制参数 4-18 (2) 设定项目 (MNLA、FMLA 通用 ) 输入范围 № 项目 最小值 最大值 单 位 备考 1 动作区分 0 19 参照 (3) 动作区分 2 速度区分 0 7 参照 (4) 速度区分 3 增益数据 算法 PIV1(4) 4 位置循环比例增益 5 位置循环综合增益 6 速度循环综合增益 7 位置循环送料增益 8 速度循环送料增益 9 加速度循环送料增益 10 送料预期增益 11…
Rev2.00
机器控制参数
4-17
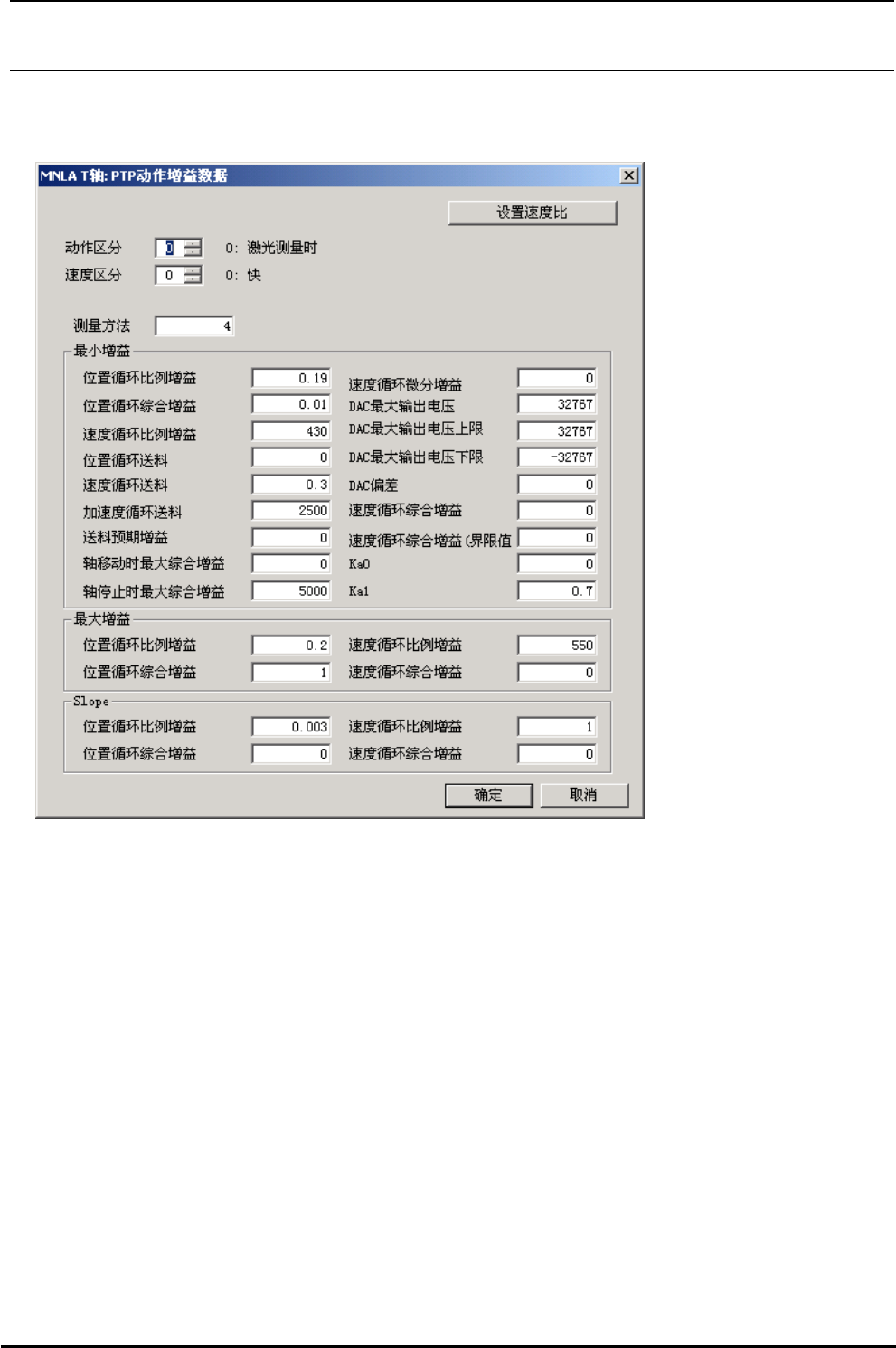
4-1-8 θ轴PTP动作的增益
图 4-1-8 θ轴 PTP 动作的增益
(1)设定画面的显示方法
菜单∶MNLA 时,[输入]→[Head]→[MNLA]→[T]→[PTP]→[增益]
FMLA时,[输入]→[Head]→[FMLA]→[T]→[PTP]→[增益]
动作∶MNLA 时,[Head]按键→[MNLA]Tab→[T]Tab→[PTP]Tab→[增益数据]按键
FMLA时,[Head]按键→[FMLA]Tab→[T]Tab→[PTP]Tab→[增益数据]按键
从速度比设定画面(图 4-1-7)∶ [设置增益数据]按键
注 1) 选择了[速度比設定]按键之后,速度比设定画面(图 4-1-7)被显示出来。此时,在现在显示的“动作区
分”、“速度区分”上显示出有关速度比。
注 2) 从速度比设定画面(图 4-1-7)显示出本画面后,不显示[设置速度比]按键。此时,使用[OK]按键或[取
消]按键结束本画面之后,返回速度比设定画面。
Rev2.00
机器控制参数
4-18
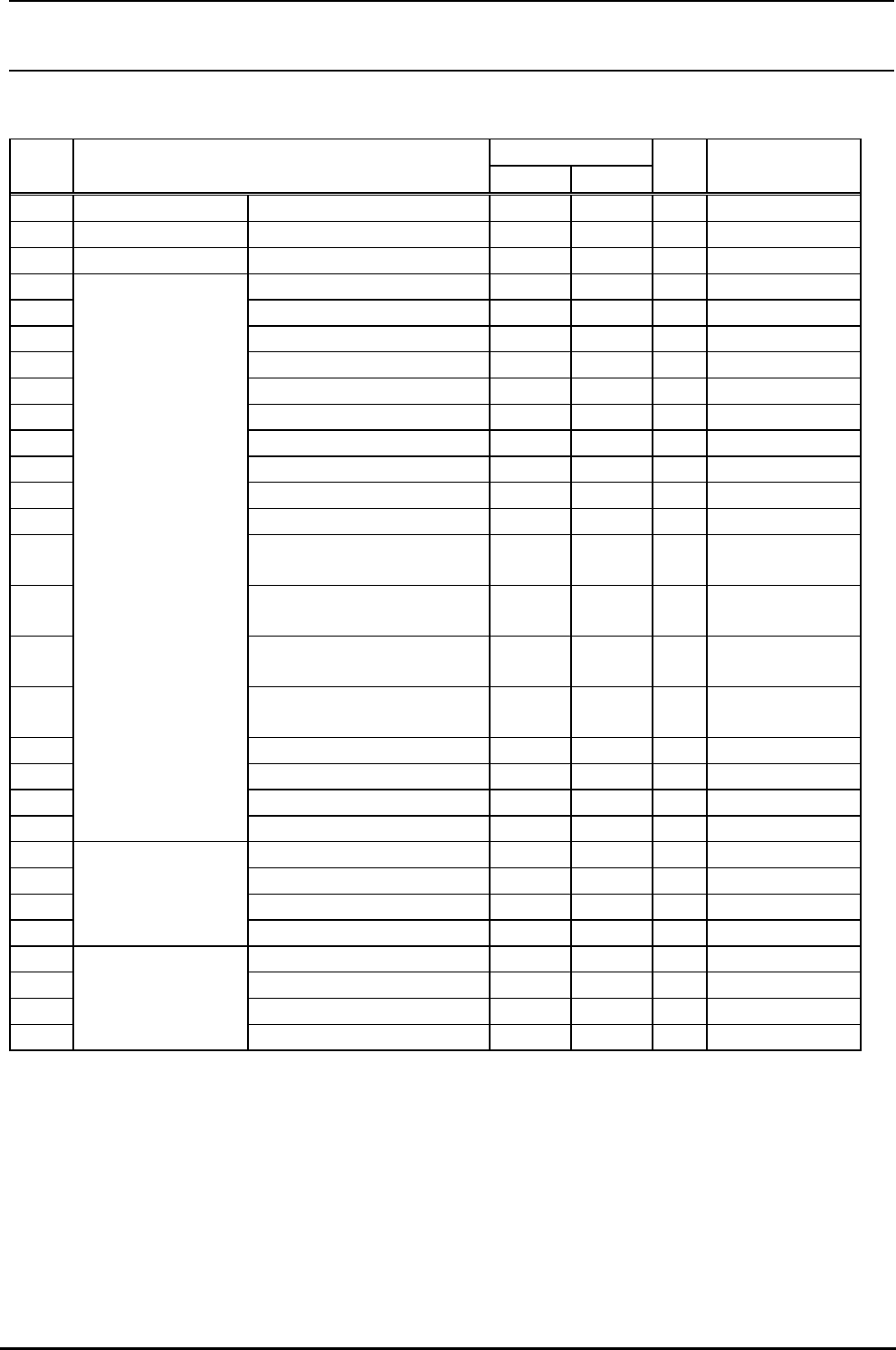
(2)设定项目(MNLA、FMLA 通用)
输入范围
№ 项目
最小值 最大值
单
位
备考
1 动作区分 0 19 参照(3)动作区分
2 速度区分 0 7 参照(4)速度区分
3 增益数据 算法 PIV1(4)
4 位置循环比例增益
5 位置循环综合增益
6 速度循环综合增益
7 位置循环送料增益
8 速度循环送料增益
9 加速度循环送料增益
10 送料预期增益
11 轴移动时最大综合增益
12 轴停止时最大综合增益
13 速度循环微分增益
14
DAC 最大输出电压
(最大转矩指令)
15
DAC 最大输出电压上限
(转矩指令上限)
16
DAC 最大输出电压下限
(转矩指令下限)
17
DAC 输出偏差
(转矩指令偏差)
18 速度循环综合增益
19 速度循环综合增益界限值
20 Ka0
21
最小增益
(基本增益)
Ka1
22 位置循环比例增益
23 位置循环综合增益
24 速度循环比例增益
25
最大增益
(使用 PIV1 时的增
益上限值)
速度循环综合增益
26 位置循环比例增益
27 位置循环综合增益
28 速度循环比例增益
29
Slope
(使用 PIV1 时对位
置偏差的乘数)
速度循环综合增益
Rev2.00
机器控制参数
4-19
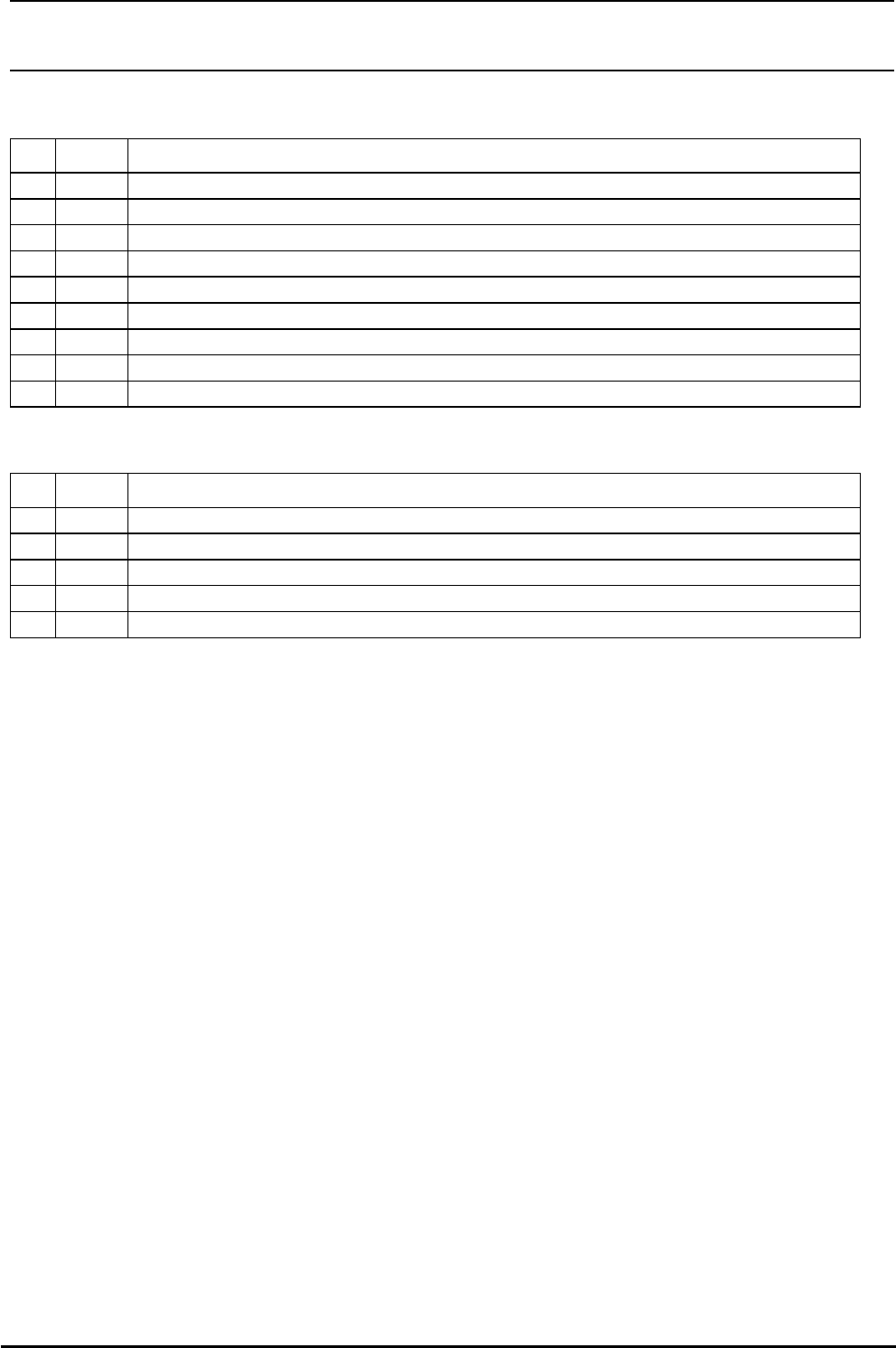
(3)动作类型
№ 类别 内 容
1 0 激光测定时
2 1 激光试验测定时
3 2 激光测定以外
4 3 VCS 识别动作时
5 4 贴片角度
6 5 无元件动作
7 6 生产动作之外(有标准化)
8 7 生产动作之外(无标准化)
9 8~19 预备
(4)速度类型
№ 类别 内 容
1 0 高速
2 1 中速
3 2 低速
4 3 超低速
5 4~7 预备