00194931-20 Anleitung CAN Test Box-Error Frame Diagnoseeinheit_de.pdf - 第150页
1 - 150 SIPLACE CAN Bus Ausgabe 10/2018 150 Abb. 4.17 - 4 Maschinen CAN Bus Siplace E-Serie Stromlaufplan 9001 1772-01 : L E L 9 L OIlO L GL 8 O 9 G L ' I L G LO & L IK L G L L L K GK 3L L O GE L L I L 2II G OL …
1 - 149
Ausgabe 10/2018 Siplace CAN Bus
149
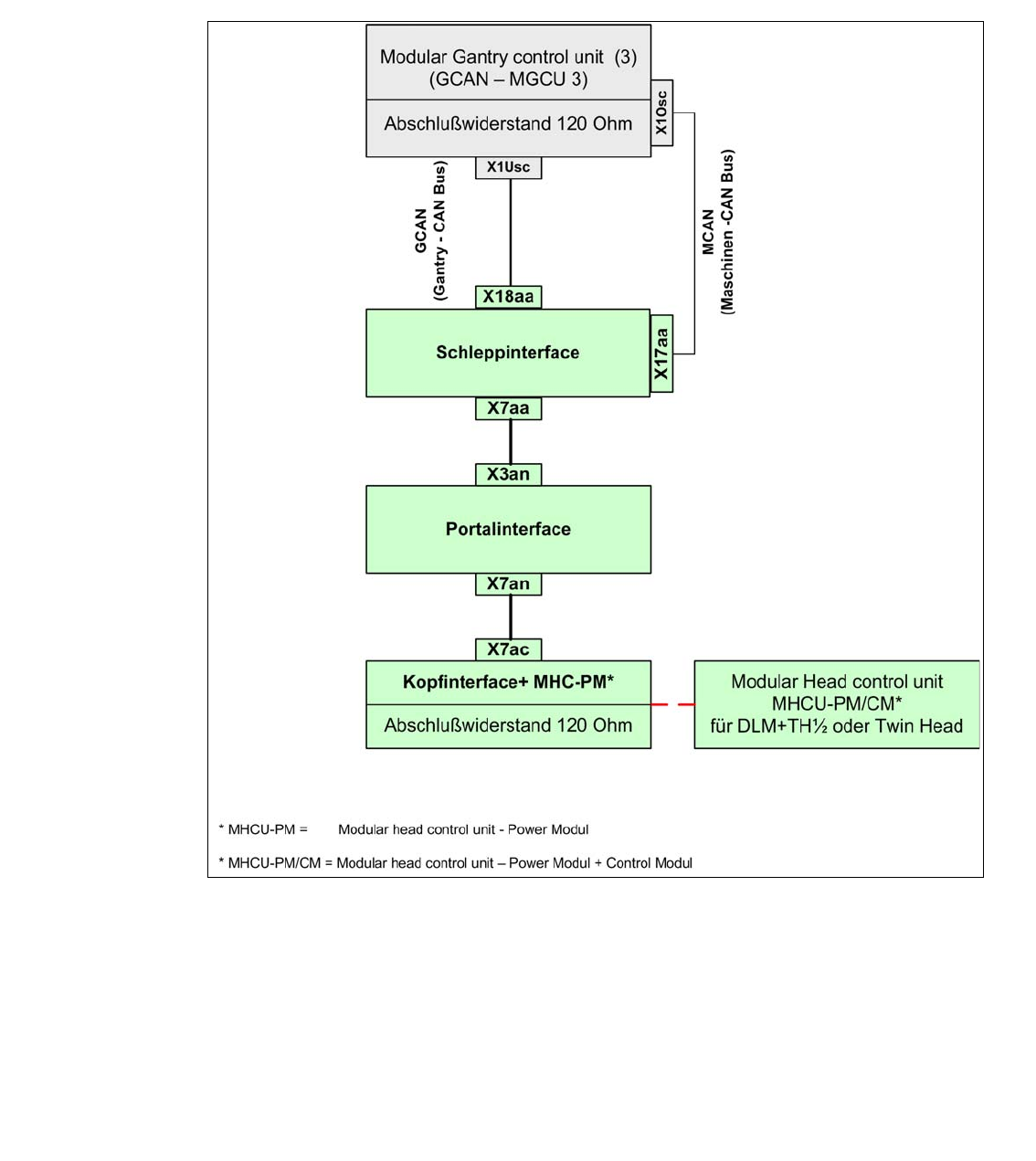
4.17.2 Gantry CAN Bus Struktur E-Serie
Der GCAN-Bus ist für die Kommunikation zwischen den Modular Gantry Control Units (MGCU´s)
und Modular Head Control Units (MHCU´s) für Portale in einem Bestückbereich verantwortlich
(z.B. Kopf-CAN-Diagnose oder SIRIO-Kommunikation).
:
Abb. 4.17 - 3 Gantry CAN Bus Siplace E-Serie
1 - 150
SIPLACE CAN Bus Ausgabe 10/2018
150
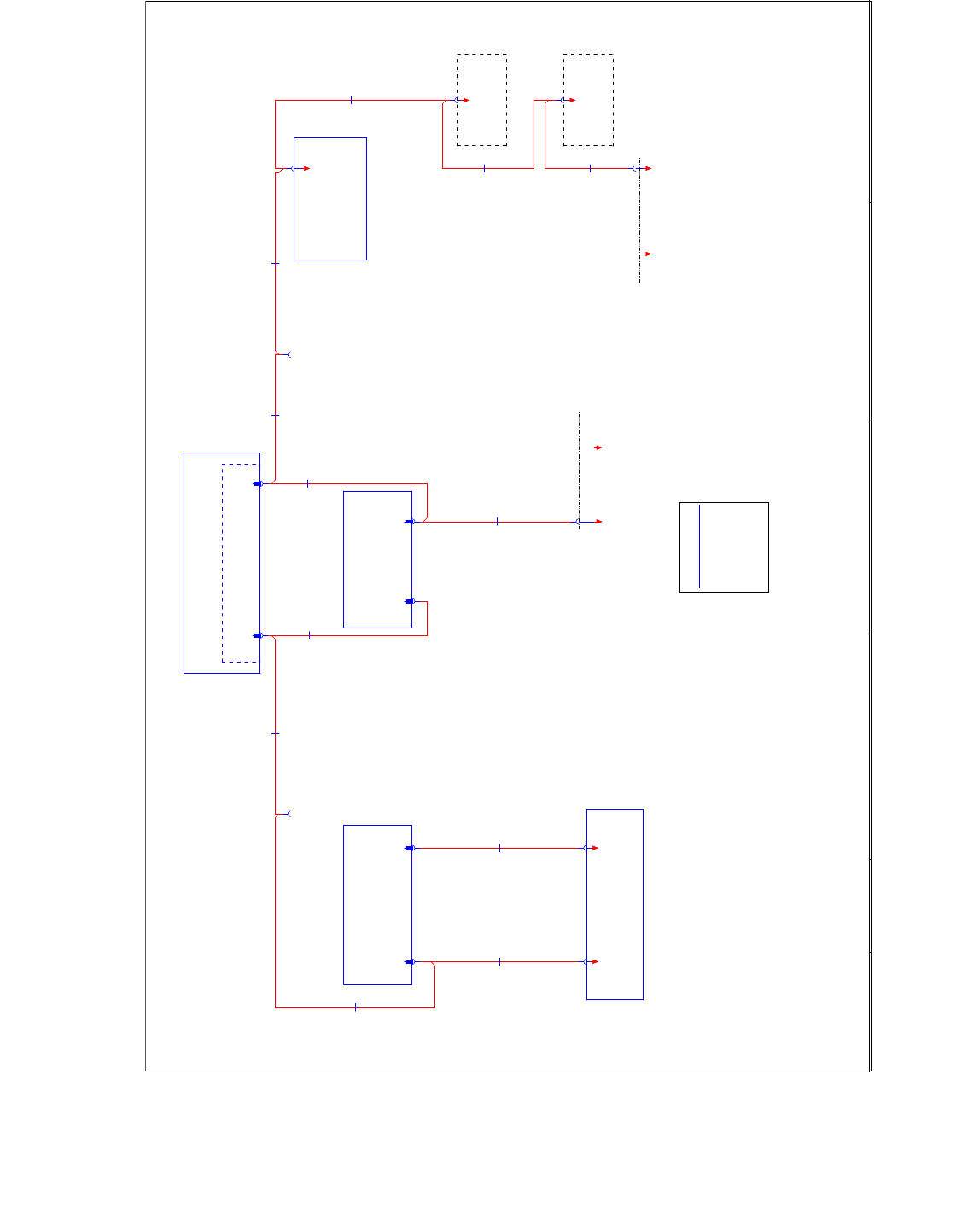
Abb. 4.17 - 4 Maschinen CAN Bus Siplace E-Serie Stromlaufplan 90011772-01
: L E L 9 L OIlO L GL 8 O 9 GL ' ILG LO & L IKLG LL L K GK3L LO GE L L I L 2II G OL EO I G $OO L K G L K = L G K GO IOL K 6 K G $OO 5 K E K O
&$1%86
&$1%86
&$1%86
&$1%86
&$1EXVZLULQJ
&$1EXVZLULQJ
&$1EXVZLULQJ
&$1EXVZLULQJ
ZLUHQRZLULQJ68%'SLQ
IUHH
*1'
&$1B/
&$1B+
*1'
IUHH
IUHH
IUHH
IUHH
&$1%86
&$1%86
&$1%86
&$1%86
2SWLRQDO
$WWDFKHGIRURQHVLGHGRSHUDWLRQ
2SWLRQDO
2SWLRQDO
2SWLRQDO
2SWLRQDO
)RU&27L/RF
)RU&27L/RF
)RU&27L/RF
)RU&27L/RF
2SWLRQDO
2SWLRQDO
2SWLRQDO
2SWLRQDO
)RU&27L/RF
)RU&27L/RF
)RU&27L/RF
)RU&27L/RF
0*&8
0*&8
0*&8
0*&8
0*&80RWLRQFRQWUROOHU
0*&80RWLRQFRQWUROOHU
0*&80RWLRQFRQWUROOHU
0*&80RWLRQFRQWUROOHU
;2VF
;2VF
;2VF
;2VF
0&$1
;8VF
;8VF
;8VF
;8VF
*&$1
763
763
763
763
DR
DR
DR
DR
SF
SF
SF
SF
&RQWURO&RPSXWHU
&RQWURO&RPSXWHU
&RQWURO&RPSXWHU
&RQWURO&RPSXWHU
;SQ
;SQ
;SQ
;SQ
0&$1
;
;
;
;
&$1
;
;
;
;
&$1
&DEOH&$1%XV0&$1
:
:
:
:
&DEOH&$1%XV0&$1
:
:
:
:
DD
DD
DD
DD
7UDLOLQJ,QWHUIDFH
7UDLOLQJ,QWHUIDFH
7UDLOLQJ,QWHUIDFH
7UDLOLQJ,QWHUIDFH
&DEOH&$1%XV0&$1
:
:
:
:
&DEOH&$1%XV
0&$1
:
:
:
:
;GP
;GP
;GP
;GP
/RFDWLRQ
/RFDWLRQ
/RFDWLRQ
/RFDWLRQ
6WDWLRQDU\)&FDPHUDV
6WDWLRQDU\)&FDPHUDV
6WDWLRQDU\)&FDPHUDV
6WDWLRQDU\)&FDPHUDV
;SQ
;SQ
;SQ
;SQ;SQ
;SQ
;SQ
;SQ
;SQ
;SQ
;SQ
;SQ
6HUYLFH
6HUYLFH
6HUYLFH
6HUYLFH
0&$1
0&$1
0&$1
0&$1
;TE
;TE
;TE
;TE
;SQ
;SQ
;SQ
;SQ
6HUYLFH
6HUYLFH
6HUYLFH
6HUYLFH
0&$1
0&$1
0&$1
0&$1
;2VF
;2VF
;2VF
;2VF
;DD
;DD
;DD
;DD
;8VF
;8VF
;8VF
;8VF
;
;
;
;
SQ
SQ
SQ
SQ
&DQFDUG
&DQFDUG
&DQFDUG
&DQFDUG
&2093&,
TE
TE
TE
TE
$VVHPEO\,2&RQWURO8QLW,,
$VVHPEO\,2&RQWURO8QLW,,
$VVHPEO\,2&RQWURO8QLW,,
$VVHPEO\,2&RQWURO8QLW,,
'LVWULEXWRU
'LVWULEXWRU
'LVWULEXWRU
'LVWULEXWRU
;DP
;DP
;DP
;DP
/RFDWLRQ
/RFDWLRQ
/RFDWLRQ
/RFDWLRQ
6WDWLRQDU\,&FDPHUDV
6WDWLRQDU\,&FDPHUDV
6WDWLRQDU\,&FDPHUDV
6WDWLRQDU\,&FDPHUDV
&DEOH&$1%XV0&$1
:
:
:
:
&DEOH&$1%XV0&$1
:
:
:
:
;DR
;DR
;DR
;DR
&DEOH&$1%XV0&$1
:
:
:
:
&DEOH&$1%XV0&$1
:
:
:
:
&DEOH&$1%XV0&$1
:
:
:
:
;
;
;
;
;DD
;DD
;DD
;DD
&DEOH&$1%XV
*&$1
:
:
:
:
;SQ
;SQ
;SQ
;SQ
0&$1
&DEOH&$1%XV
0&$1
:
:
:
:
;TE
;TE
;TE
;TE
&DEOH&$1%XV0&$1
:
:
:
:
;GP
VW&$0
&$1&2BU
&2
;
&27)&8/RFDWLRQ
&27)&8/RFDWLRQ
&27)&8/RFDWLRQ
&27)&8/RFDWLRQ
0&$1
*$
*&$1
*$
;DP
VW&$0
;
07)&8/RFDWLRQ
07)&8/RFDWLRQ
07)&8/RFDWLRQ
07)&8/RFDWLRQ
$
;
&27)&8/RFDWLRQ
&27)&8/RFDWLRQ
&27)&8/RFDWLRQ
&27)&8/RFDWLRQ
1 - 151
Ausgabe 10/2018 Siplace CAN Bus
151
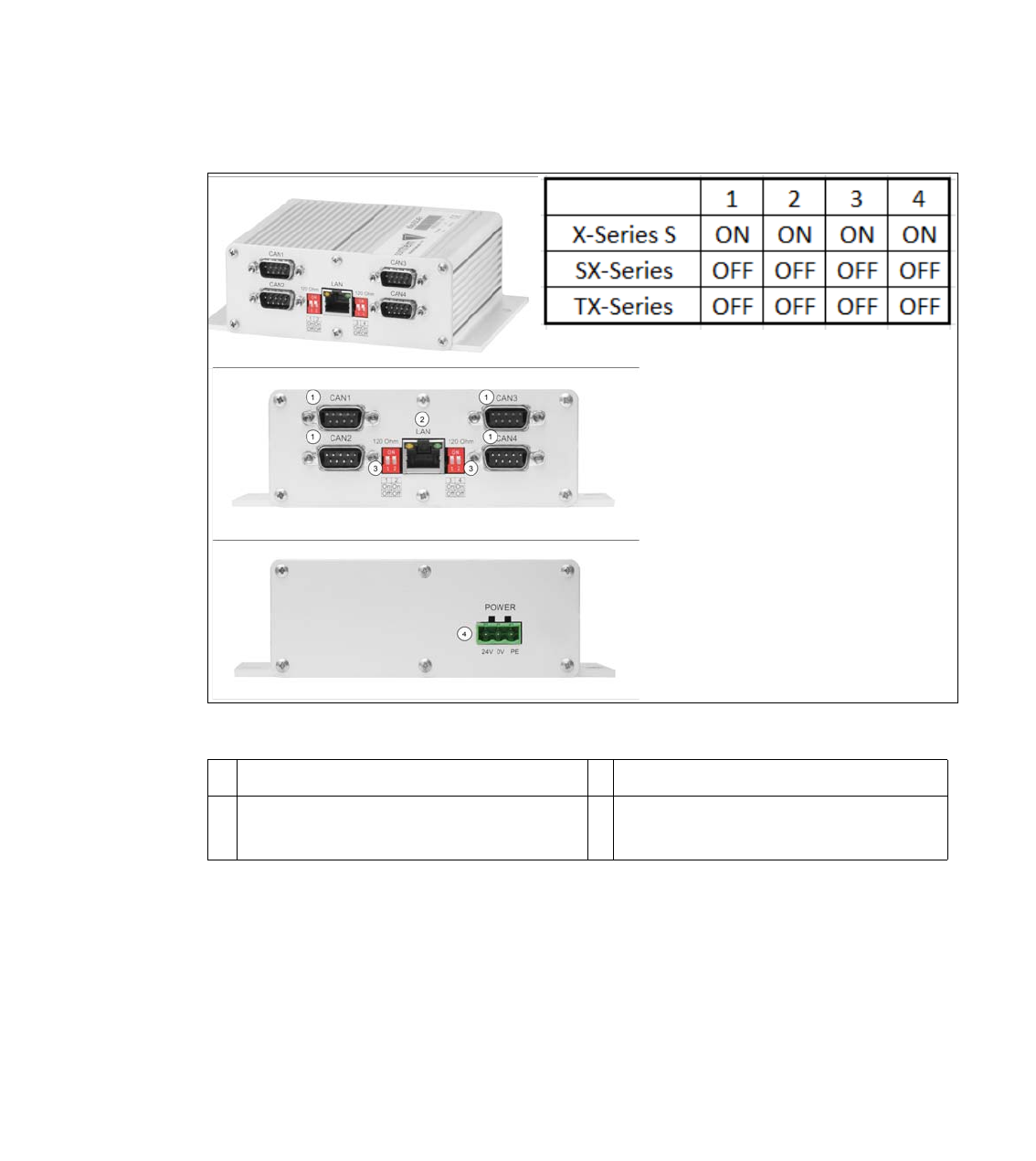
4.18 CAN Bus Struktur Siplace TX-Serie (ab Nov.2015)
Die SIPLACE TX Maschinen können als TX2i, mit zwei Portalen und Tischposition innen, als TX2,
mit zwei Portalen und Tischposition 1 außen, bzw. als TX1 mit einem Portal und ebenfalls mit der
Tischposition 1 außen konfiguriert werden.
Je nach Konfiguration ergeben sich unterschiedliche CAN Bus Strukturen. Grundsätzlich arbeitet
die TX mit 3 getrennten CAN Bus Netzen und einer Übertragungsrate von 1MBit/s.
Die Kommunikation zu den Subsystemen erfolgt über die CIN Box, dabei ist zu beachten, dass
die Abschlußwiderstände auf dem E/A Module geschaltet werden, siehe Übersicht der CAN Bus
Strukturen.
Abb. 4.18 - 1 03108598-xx CAN Interface CINX
1 CAN Bus Anschlüsse CAN1-4 2 LAN Anschluß CAT 5 Kabel zum PC
3 DIP Switch - Einstellung Abschlusswider-
stand 120 Ohm für CAN1-4
4 Anschluß 24V Spannungsversorgung