00197892-03_UM_SX12-V2_FI.pdf - 第133页
Käyttöohje SIPLACE SX1/SX2 3 Tekniset tiedot ja moduulit Ohjelmistoversiosta SR.710.0 alkaen Painos 12/2016 3.6 Portaalijärjestelmä 133 3.6.3 Y -akselin rakenne 3 Kuva 3.6 - 5 Y -akselin rakenne Y -akseli muodos tuu olen…
3 Tekniset tiedot ja moduulit Käyttöohje SIPLACE SX1/SX2
3.6 Portaalijärjestelmä Ohjelmistoversiosta SR.710.0 alkaen Painos 12/2016
132
3
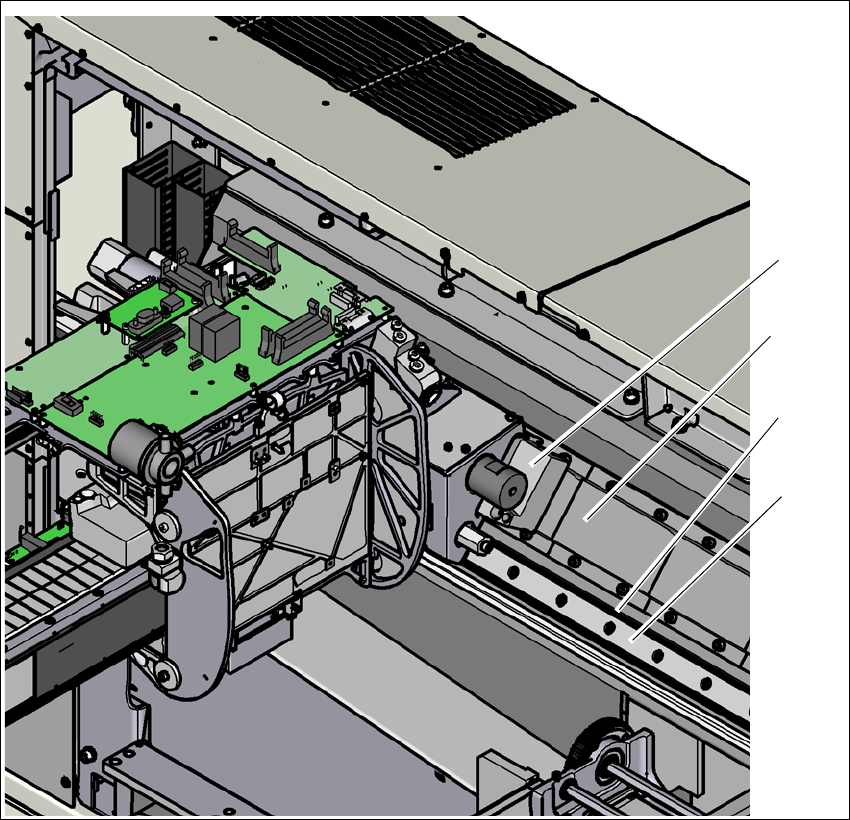
Kuva 3.6 - 4 Portaalin rakenne- alhaalta nähtynä
(1) Piirilevykamera
(2) Lukuyksikkö
(3) Pituudenmittausjärjestelmä (portaalin alapuolella)
Portaalia käyttää lineaarimoottori. Käytön toisio-osa sisältää kestomagneetin ja on asennettu por-
taalin poikkikannattimelle, ensiöosa on ruuvattu kiinni pään pitimen kanssa. Pään kannatin on
suunniteltu siten, että siihen voi kiinnitää kaikki ladontapään tyypit. Tämän ominaisuuden ansiosta
SIPLACE-automaatit ovat erittäin joustavia käyttää.
(2)
(1)
(2)
(3)
Käyttöohje SIPLACE SX1/SX2 3 Tekniset tiedot ja moduulit
Ohjelmistoversiosta SR.710.0 alkaen Painos 12/2016 3.6 Portaalijärjestelmä
133
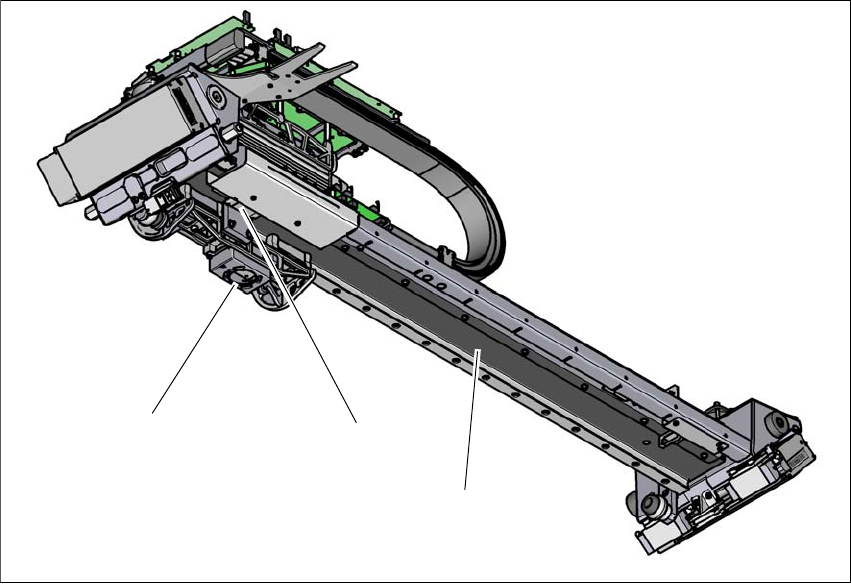
3.6.3 Y-akselin rakenne
3
Kuva 3.6 - 5 Y-akselin rakenne
Y-akseli muodostuu olennaisilta osiltaan seuraavista päärakenneryhmistä:
(1) Y-lineaarimoottorit (ensiöosa), asennettu X-akselille kiinto- ja irtolaakerin avulla
(2) Kestomagneetti ( Y-lineaarimoottorin toisio-osa)
(3) Lineaarinen etäisyydenmittausjärjestelmä
(4) Johdejärjestelmä
(1)
(2)
(4)
(3)

3 Tekniset tiedot ja moduulit Käyttöohje SIPLACE SX1/SX2
3.7 PL-kuljetinjärjestelmä Ohjelmistoversiosta SR.710.0 alkaen Painos 12/2016
134
3.7 PL-kuljetinjärjestelmä
3.7.1 Kuvaus
Piirilevykuljettimet rakentuvat kolmesta osasta: syöttökuljettimesta, käsittelykuljettimesta ja luovu-
tuskuljettimesta. Syöttökuljettimen ja luovutuskuljettimen muodostamat kaksi aluetta toimivat pii-
rilevyjen puskurivyöhykkeinä mahdollisten lyhyiden odotusaikojen varalta.
Hihnakuljettimia käyttävät harjattomat tasavirtamoottorit. Valokennot ohjaavat ja valvovat piirile-
vyjen kuljetusta. Piirilevy pysähtyy sen saavutettua ladonta-alueen ja ohitettua valokennot. Piirile-
vyn saavuttua ohjeasemansa laservalokenno laukeaa, hihnakuljetin pysähtyy ja laite kiinnittää
piirilevyn paikalleen alapuolelta käsin.
Piirilevyn yläpinnan ja ladontapään välinen etäisyys pysyy siksi jokaiselle piirilevylle muuttumatto-
mana eikä se riipu piirilevyn paksuudesta. Siitä johtuen myöskään ladontanopeus ei ole riippuvai-
nen PL-paksuudesta. Sen lisäksi PL-merkinkeskitys saadaan optimoitua. Samana pysyvällä PL-
yläpinnan ja PL-kameran välisellä etäisyydellä PL-kameran fokus on aina asetettu yhtä teräväksi
PL-yläpinnalle. PL-merkkimuodot kuvataan optimaalisesti PL-kameran CCD-Chip:llä.
Piirilevykuljetuksen leveys asetetaan ja valvotaan elektronisesti integroidulla säätöpiirillä. Sen saa
valittua ohjelman esiinkutsumisella. Tätä varten elektroninen säätöjärjestelmä pitää käyttömoot-
torin käynnissä siihen saakka, kunnes sopiva leveys on saavutettu.
Kuljetuskorkeus on valittavissa automaatista siten, että automaatin voi integroida linjoihin, joiden
kuljetuskorkeus on 900, 930 tai 950 mm. Vakiokorkeus on 930 mm.
Yksittäisten automaattien PL-kuljetusten välinen viestintä tapahtuu SMEMA-liitäntää tai vaihtoeh-
toisen Siemens-liitäntää käyttäen.
Käyttäjä voi valita, sijaitseeko kaksoiskuljettimen kiinteä puoli oikealla tai vasemmalla. Tämän kul-
jettimen kiinteän puolen vaihtaminen oikealta vasemmalle (tai päinvastoin) on helppoa aseman
ohjelmiston avulla.
Yksittäiskuljettimen tapauksessa kiinteä puoli sijaitsee on aina oikealla. Mekaaniseen varustuk-
seen tehtävien muutosten ansiosta kuljettimen kiinteä puoli voi sijaita myös vasemmalla.
Jos varustukseen kuuluu optio "Smart Pin Support", piirilevyn alapuolisten Support Pin -tappien
sijoittaminen nostopöydän päälle tapahtuu automaattisesti. Ks. tämän osalta luku 6.16
, sivu 352.