SiplaceX4_en.pdf - 第102页
1 - 26 S tudent Guide SIPLACE X 3 Communication and Control Edition 09/2005 26 3.3.1 1.1 Communication during a image acquis ition The main communication b etween the vision system and machinecontroller is the transmissi…
1 - 25
Student Guide SIPLACE X
Edition 09/2005 3 Communication and Control
25
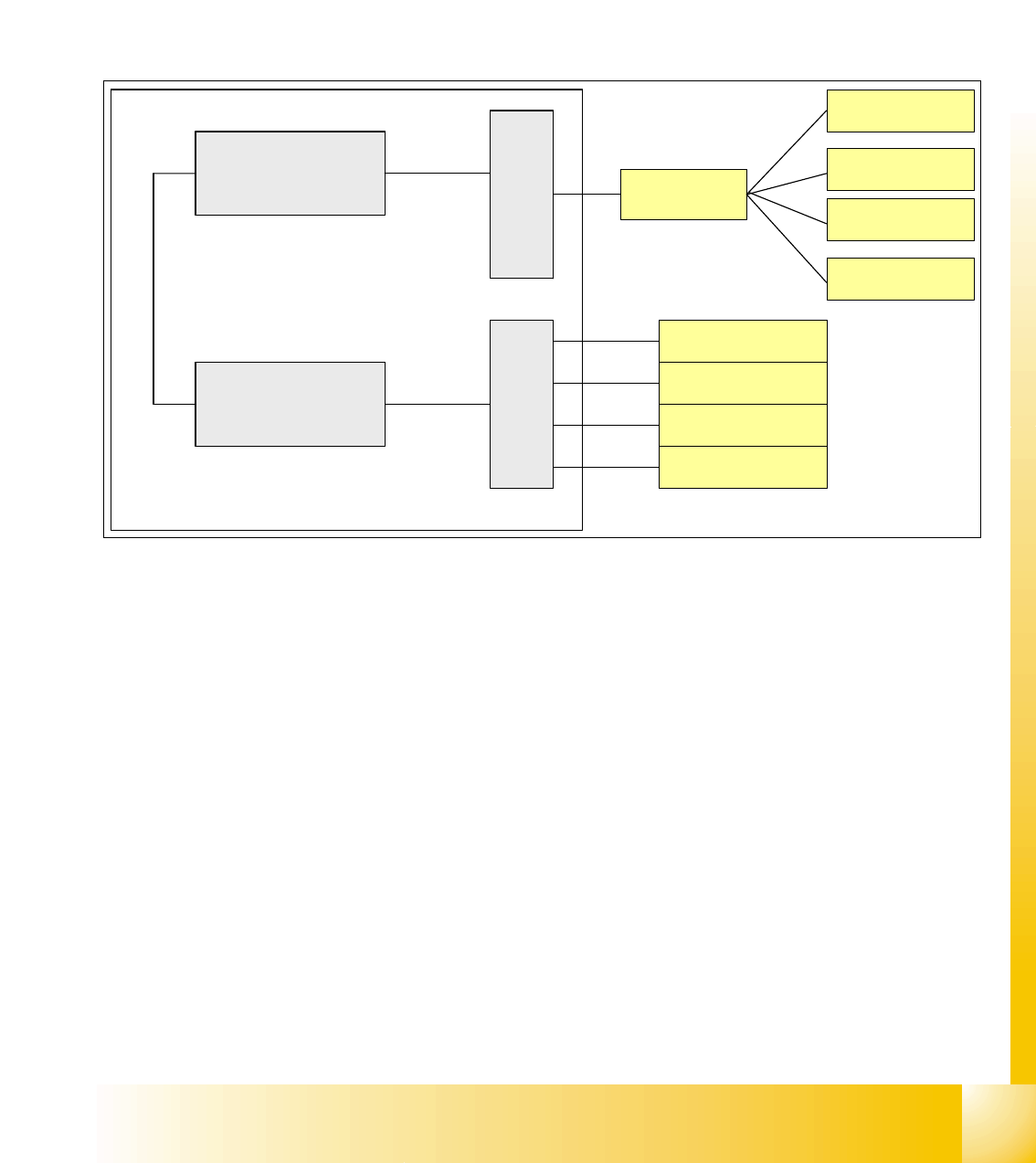
3.3.11 Communication Siplace Vision
The communication between the computers is carried out via LAN cables. The MC send the com-
mands for the image acquisition to the Visionrechner and receives the result of the measuring.
The MC send the illumination values of the corresponding GF.
The taken pictures are sent digital via the Hot link card to the Visionrechner, these evaluated the
picture.The result is sent to the MC.
Fig. 3.3 - 20 Overview Siplace Vision
Computer Unit
PCB-Camera
FC-Camera
IC-Camera
Component
Camera
Machine controller
(MC)
Sationcomputer with
Visionsoftware
LAN
Hotlink-Board
CAN Bus
Vision Board
PCB-Camera
Illumination
Comp.Camera
Illumination
FC-Camera
Illumination
IC-Camera
Illumination
Backplane
Backplane
COM-Board
1 - 26
Student Guide SIPLACE X
3 Communication and Control Edition 09/2005
26
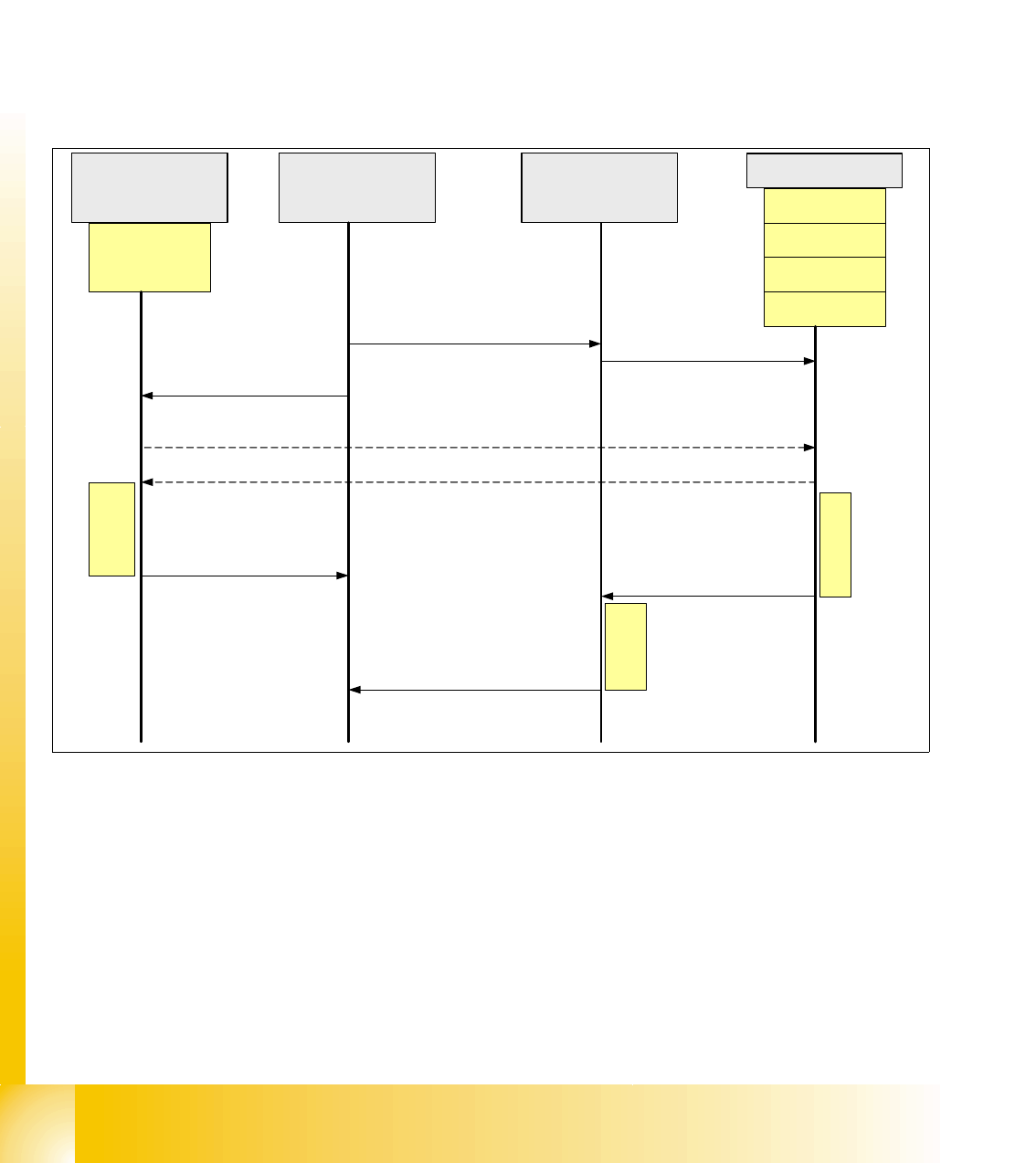
3.3.11.1 Communication during a image acquisition
The main communication between the vision system and machinecontroller is the transmission of
illumination values. These values, stored in the GF, are sent via CAN bus to the camera in ques-
tion. As soon as the camera should take the picture, the camera illumination is activated by a trig-
ger. From this moment on the row of LEDs which provide the different illumination levels light
dependant on the illumination value 0-255. This illumination value can have 0 = dark up to 255 =
bright. All illumination levels start lighting at the same moment. The value 0-255 determines the
length of the illumination time.
The maximum length of illumination is limited to 6 ms.
Fig. 3.3 - 21 Time sequence from up to down for the Communication Image acquisition
Cameras
Illumination
Controller
Machine controller
(MC)
Stationcomputer with
Visionsoftware
Prepare
CAN Bus
Illumination
(ca. 6ms)
PCB-Camera
FC-Camera
IC-Camera
Component
Camera
Start Image acquisition
(Illumination values)
Prepare Flash
(illumination)
Hardware Signal
(Trigger)
Visionboard(LP,BE)
Vision Control unit ,
(IC,FC)
Ready message
to the MC
Signal "Ready for
Image aquisition"
CAN Bus
Image
interpretation
Image
acquisition
Ready message
to the VISION SW
Result
"Image interpretation"
1 - 27
Student Guide SIPLACE X
Edition 09/2005 3 Communication and Control
27
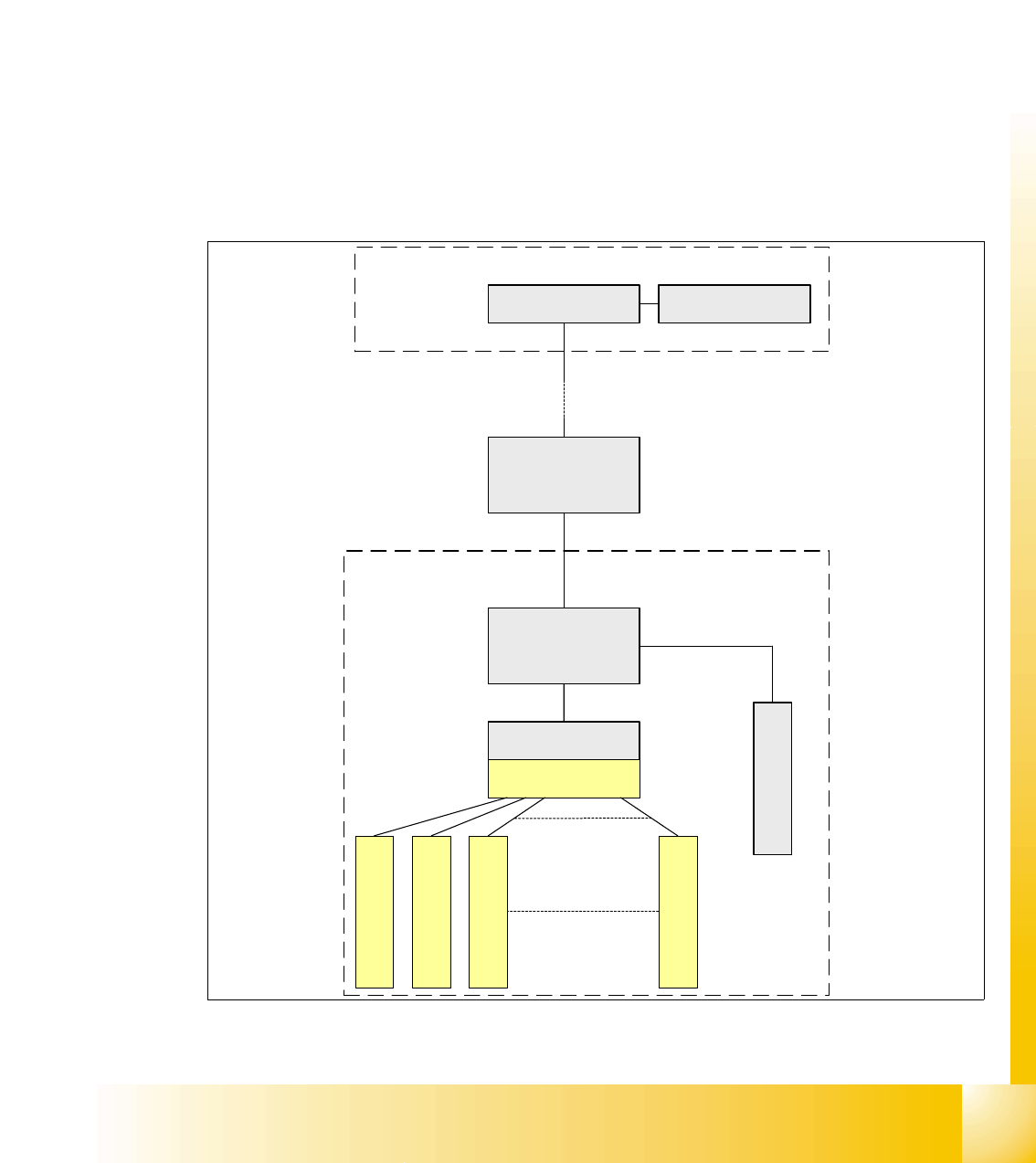
3.3.12 Communikation C&P 20 Head
The TQM –moduel on the head interface C500 is communicate via the CAN Bus (1M/Baud) to the
Machine controller.
The communication from the head interface to the C&P20 head is carried out with an additional
CAN Bus. Which sed the data with 125KBaud. (in Future 500kBaud)
The 20 DP - axes are controled via the „DP- Master" on the motherboard. So the machine CAN
Bus send 4 commands:
– Start the DP axis after Pick up/Placement (Pick up angle/Placement angle)
– Start the DP axis after Vision (Correction angle)
– Wait DP axis before Vision (Position commando not allowed)
– Wait DP axis before Pick up/Placement (Position commando not allowed)
Fig. 3.3 - 22 CAN-Bus controlled head function on the C&P 20 head
Computer Unit
Head processor
C500
COM Board
Vacuum/air kiss
generator
Machine- CAN Bus
(1MBaud)
Head- CAN Bus
(125KBaud/
500KBaud)
DP Master
Motherboard
C&P 20 Head
DP - drive 20
DP - drive 1
DP - drive 2
DP - drive 3
Intermediate
distributor
MC