SiplaceX4_en.pdf - 第114页
1 - 14 S tudent Guide SIPLACE X 3 Communication and Control Edition 09/2005 14 Note:
1 - 13
Student Guide SIPLACE X
Edition 09/2005 3 Communication and Control
13
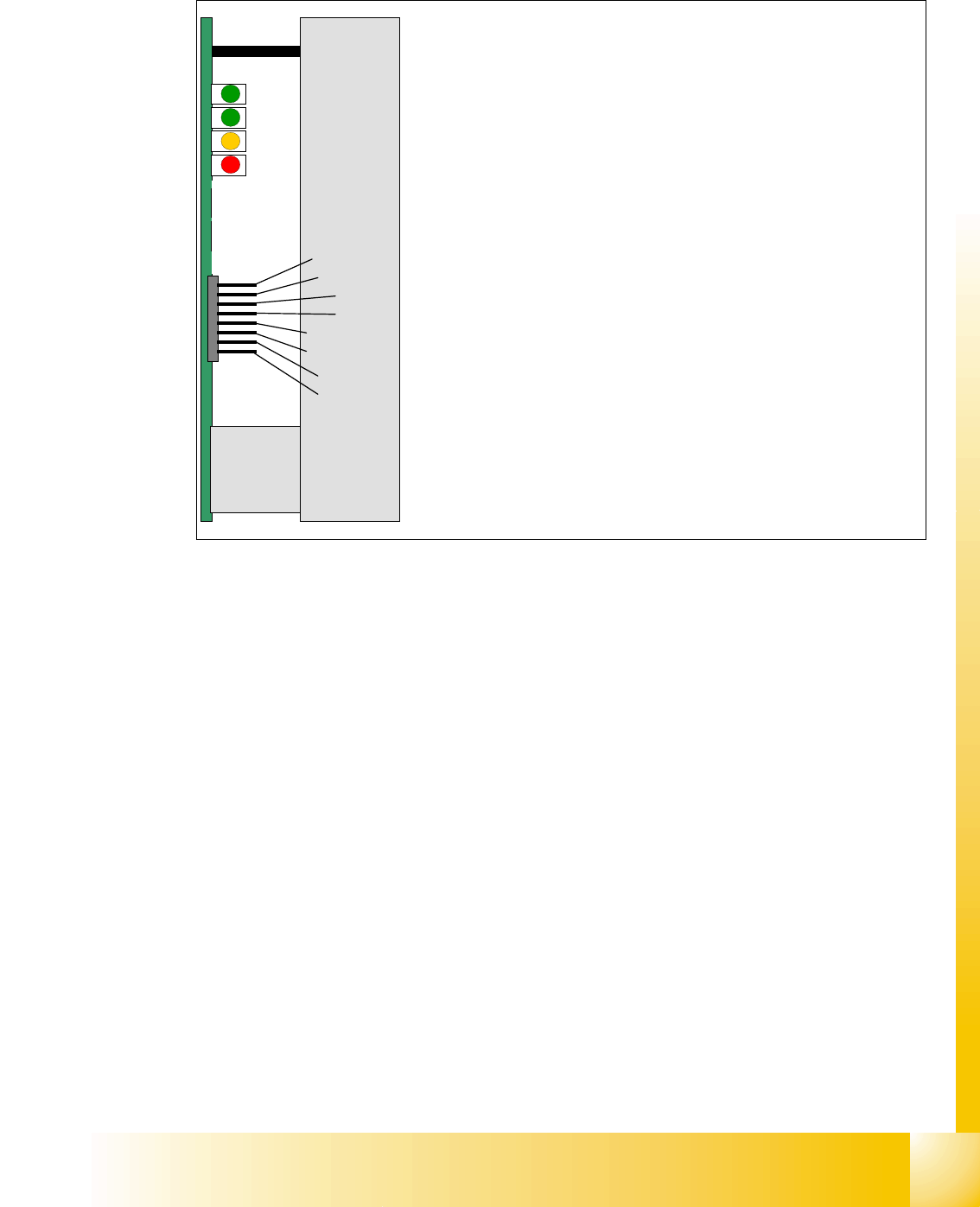
3.4.3.1 Servo amplifier TBS .. and SDS ...
Fig. 3.4 - 11 Servo amplifier
This SDS and TBS Servo amplifiers are to reset by Servo disable / Servo enable at Axis controller
board.
All Servos special adjusted to the maximum current of the drive motor of the refering axis type.
This mean the servo amplifiers have to be mount axis specifically.
Measurement Pin MP7: 3
In case of an error on the Servo amplifier, it is possible to measure on the analog output pin MP7
different voltages to determined the error.
– - over voltage -1V
– - over current -2V
– - over temperature -3V
– - nominal current to high -4V
Nominal current I
U
Nominal current I
W
Actual current I
U
Actual current I
W
Outp. Current controller Voltage V
U
Outp. Current controller Voltage V
W
Error
GND
Ready
Servo Enable
I
RMS
error
Board error
The nominal current signals also measurable at V nominal / Force
output of Axis controller
The Pin 3/4 show the actual current signals to the motor.
This signals are 180° phaseshifted to the nominal signal.
The Pin 5/6 show the voltages to drive the sinusoidal current
Ready is ON when Machine is ON
Servo Enable is first activated with a start of reference run. At X/Y
axis it is disabled after 2 min. without action and at Service position.
I RMS error light up at short over current pulses.
Board error is a ’permanent’ error like over voltage / over current /
over temperature.
1 - 45
Student Guide SIPLACE X
Edition 09/2005 3 Communication and Control
45
3.5 One Wire Bus
The introduction of the message loop in software version 505 (601) made it necessary to either
reduce the number of inputs/outputs or to install an additional I/O module. In order to save space
and minimize costs, we decided to introduce the "one wire bus system".
The one wire bus controls the nozzle changer in all 4 sectors, transmits the temperature values
from the sensors at the head boards and reads out the gantry data.
Tasks:
(1) Control the Nozzle changer 6/12 C&P heads (1st and 2nd row).
2. Control the Nozzle changer 20 C&P heads (1st and 2nd row), with magazine monitoring
(3) 2 Temperature sensors per gantry, fixed to the head plate.
(4) Storage of gantry identification on an EEPROM.
(A differentiation is made between Plate gantry CFK-02, D
esign To Cost (DTC) gantry CFK-04
and CFK 06 gantry. This means that the machine database loaded for the dynamic parameters
of the main axis differs according to the gantry type concerned).
5. Option: Monitoring of the reject box
3.5.1 One Wire Bus - Structure
As the name indicates, the data are transferred (serial transfer) via a single wire, to the relevant
subsystem.
The one wire bus system is used for processes where time is not a critical factor and can be real-
ized as a single master bus with „any number“ of slaves (stations).
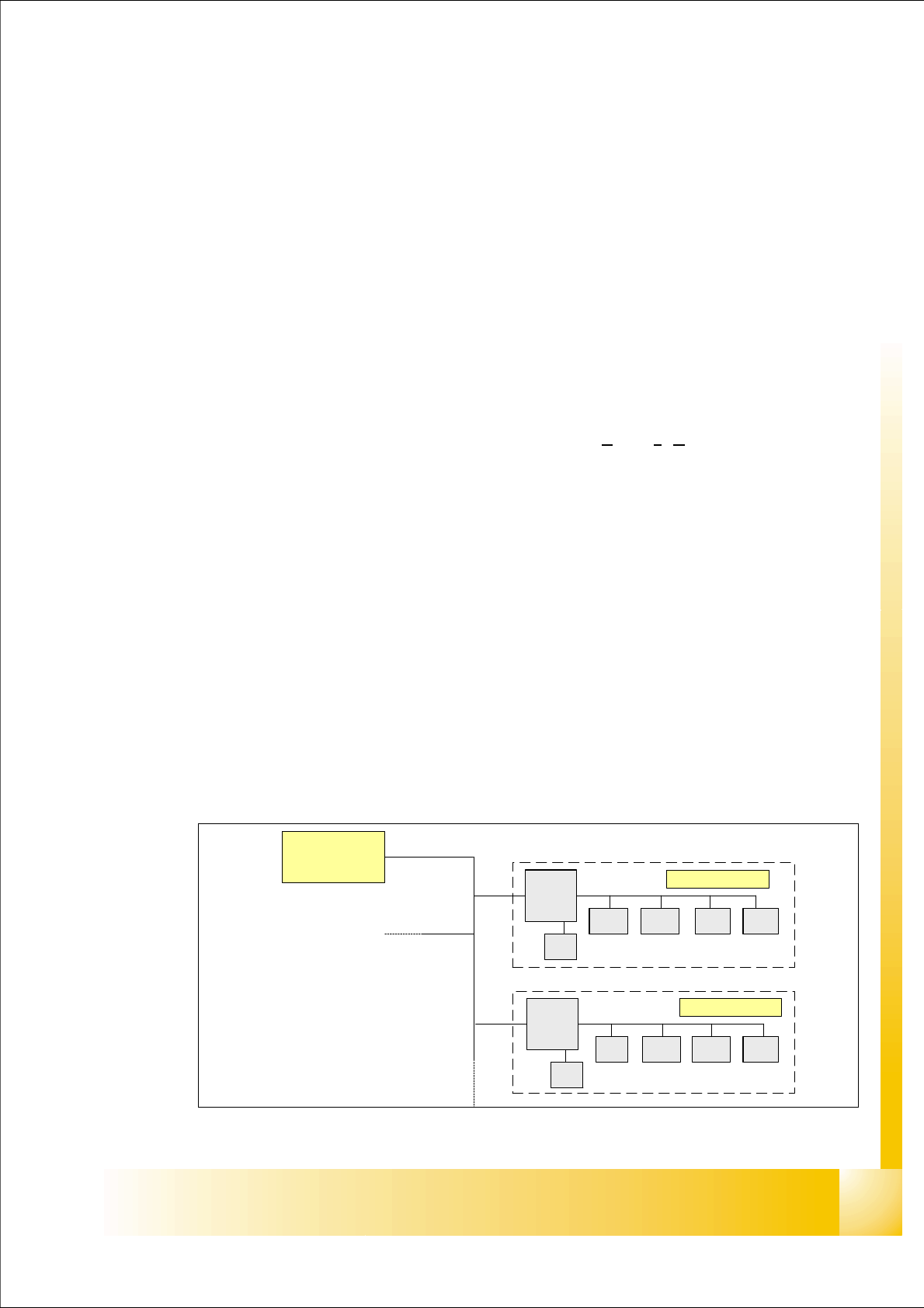
3.5.1.1 Basic Structure
The one wire bus system consists in principle of a master with EEPROM (control unit), which con-
trols the various submodules such as A/D converters, EEPROM, temperature and I/O modules.
Each communication branch is equipped with an upstream coupler,
which opens the branch for
data transfer..
Fig. 3.5 - 1 One wire bus principle
Slave
Master
Coupler
E²
A/D A/DA/D I/O
Coupler
E²
°C I/O°C
E²
Slave