SiplaceX4_en.pdf - 第196页
1 - 2 S tudent Guide SIPLACE X Contents Edition 09/2005 2 5.5.3 Check dynamic Y- axis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31 5.5.3.1 Test setup . . . . . . . . . …
Student Guide SIPLACE X
Edition 09/2005 Contents
1
Chapter
Table of contents
5 Gantry. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
5.1 Overview Gantry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
5.1.1 Mechanical structur of the X- and Y- axes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
5.1.2 Pneumatic connectors on the gantry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
5.2 Reference run Gantry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
5.2.1 Sequence reference run at X- and Y-axis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
5.2.2 X and Y commutation position search . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
5.2.3 Reference run of X- and Y- axes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
5.3 Adjustments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
5.3.1 Travel range and velocity monitoring X- and Y- Axes on the X2. . . . . . . . . . . . . . . . . 9
5.3.2 Travel range and velocity monitoring X- and Y- Axes on the X3. . . . . . . . . . . . . . . . 10
5.3.2.1 Adjustments BERO‘s . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
5.3.2.2 Description of the BERO‘s on the Y-Axis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
5.3.3 Description of the PCB boards on the Gantry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
5.3.3.1 Head interface C500 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
5.3.3.2 Vision board (digital). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.3.3.3 CAN Processorboard 16 Bit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.3.3.4 Check the DIP Switches. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5.3.4 Anti crash board . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
5.3.5 Mechanical adjustment the incremental encoder . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
5.4 Track signals and Zero pulse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
5.4.1 Check the zero pulse signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
5.4.1.1 Measurement the analog zero pulse signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
5.4.1.2 Measurement the digital zero pulse signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
5.4.2 Check the track signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
5.4.2.1 Analog track signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
5.4.2.2 Digital Track signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
5.5 Axis control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5.5.1 Parts for the axis control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5.5.2 Check dynamic X-axis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5.5.2.1 Test setup with Axis testbox. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5.5.2.2 Test setup with SAT-Box . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5.5.2.3 Travel profile X-axis C&P 20, C&P 6/12 head and Twin head in comparison . . 30
5.5.2.4 Positioning time tables X-Axis depended on the head types . . . . . . . . . . . . . . . 31

1 - 2
Student Guide SIPLACE X
Contents Edition 09/2005
2
5.5.3 Check dynamic Y- axis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.5.3.1 Test setup. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.5.3.2 Travel profile Y-axis C&P 20, C&P 6/12 head and Twin head in comparison . . 32
5.5.3.3 Positioning time tables Y-Axis depended on the head types . . . . . . . . . . . . . . . 33
1 - 3
Student Guide SIPLACE X
Edition 09/2005 5 Gantry
3
5Gantry
5.1 Overview Gantry
The gantries of the Siplace X machine consist of one X- and one Y - axis. Both axes are driven by
a linear motor which is equipped with an integrated temperature sensor. The Y-axis moves from
the right to the left side in positive counting direction if you look in transportation direction, the X-
axis moves from the the input conveyor to the output conveyer in positive counting direction. The
placement heads are mounted on the head plates of the respective X axis.
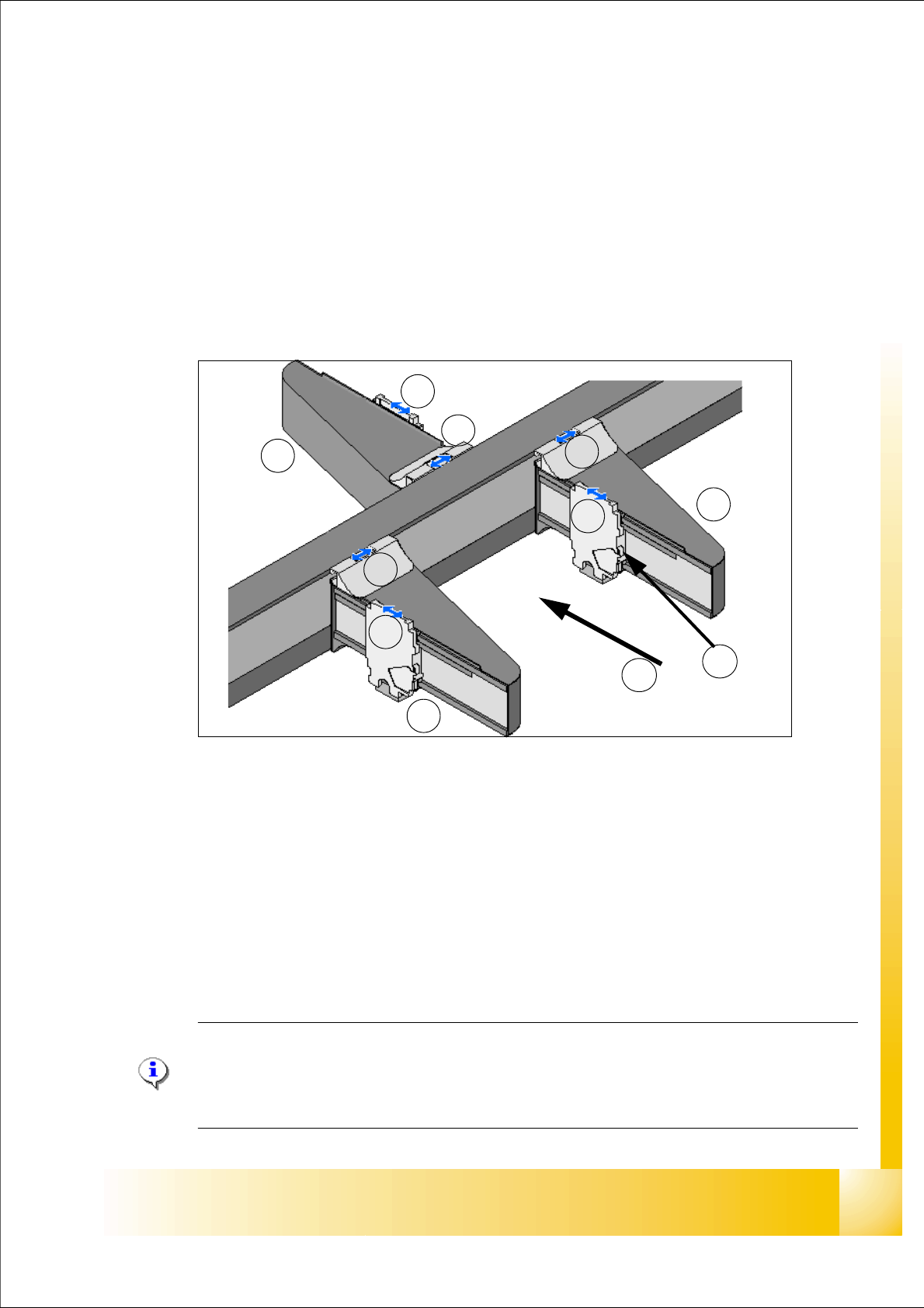
Fig. 5.1 - 1 Position of the gantries e.g. X3
Legend:
Note:
On the Siplace X and HF-Machines it is possible, that we use different kind of gantries. So
we recognize the gantry type with an Eprom and load automatically the right machine data
(CFK 02, CFK 04 or CFK 06).
G1Gantry 1 in PA1 G3Gantry 3 in PA2
X1 X-Axis, Gantry 1 X3 X-Axis, Gantry 3
Y1 Y-Axis, Gantry 1 Y3 Y-Axis, Gantry 3
G4Gantry 4 in PA 1
X4 X-Axis, Gantry 4 (T) Transportation direction
Y4 Y-Axis, Gantry 4 (TS)Temperature sensor on each head mounting plate
G4
G1
G3
Y4
Y3
Y1
X4
X3
X1
T
TS