SiplaceX4_en.pdf - 第256页
1 - 28 S tudent Guide SIPLACE X 6 Collect &Place-He ad 6/12 Edition 09/2005 28 6.3.2 12 nozzle Collect & Place head in home position star 15 ° Fig. 6.3 - 2 12 nozzle Collect & Place head in home position 6.3.…
1 - 27
Student Guide SIPLACE X
Edition 09/2005 6 Collect &Place-Head 6/12
27
6.3 Placement sequence
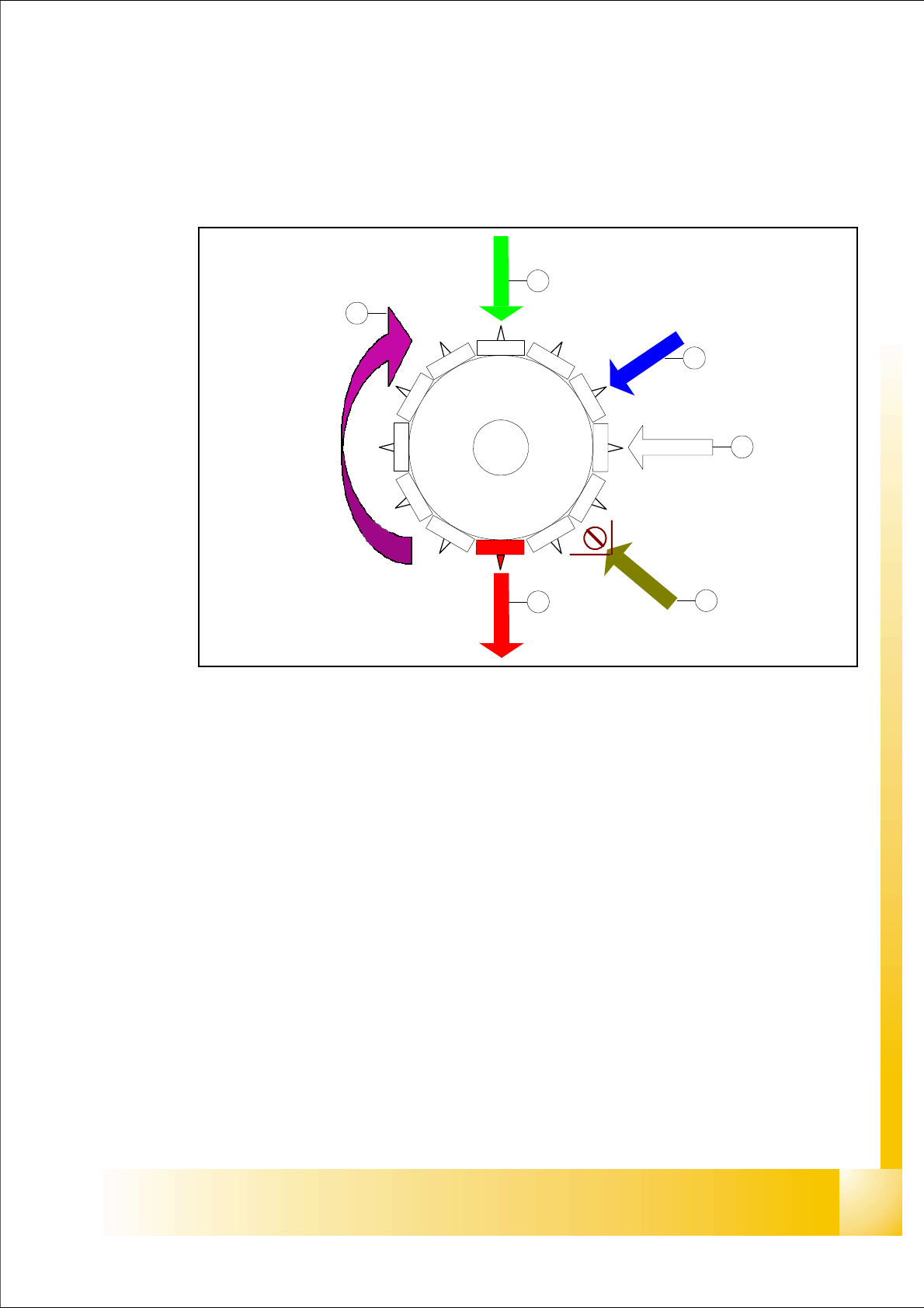
6.3.1 Working positions at the placement head
Fig. 6.3 - 1 Working positions at the placement head
Key
(1) Optical centering
(2) turning station
(3) service position for segment; Removal of the sleeve on the opposite side
(4) pick up / placement / reject position
(5) working direction
(6) option: component sensor
12
1
1
1
0
9
8
7
6
5
1
2
3
4
1
2
3
4
5
6
1 - 28
Student Guide SIPLACE X
6 Collect &Place-Head 6/12 Edition 09/2005
28
6.3.2 12 nozzle Collect & Place head in home position star 15
°
Fig. 6.3 - 2 12 nozzle Collect & Place head in home position
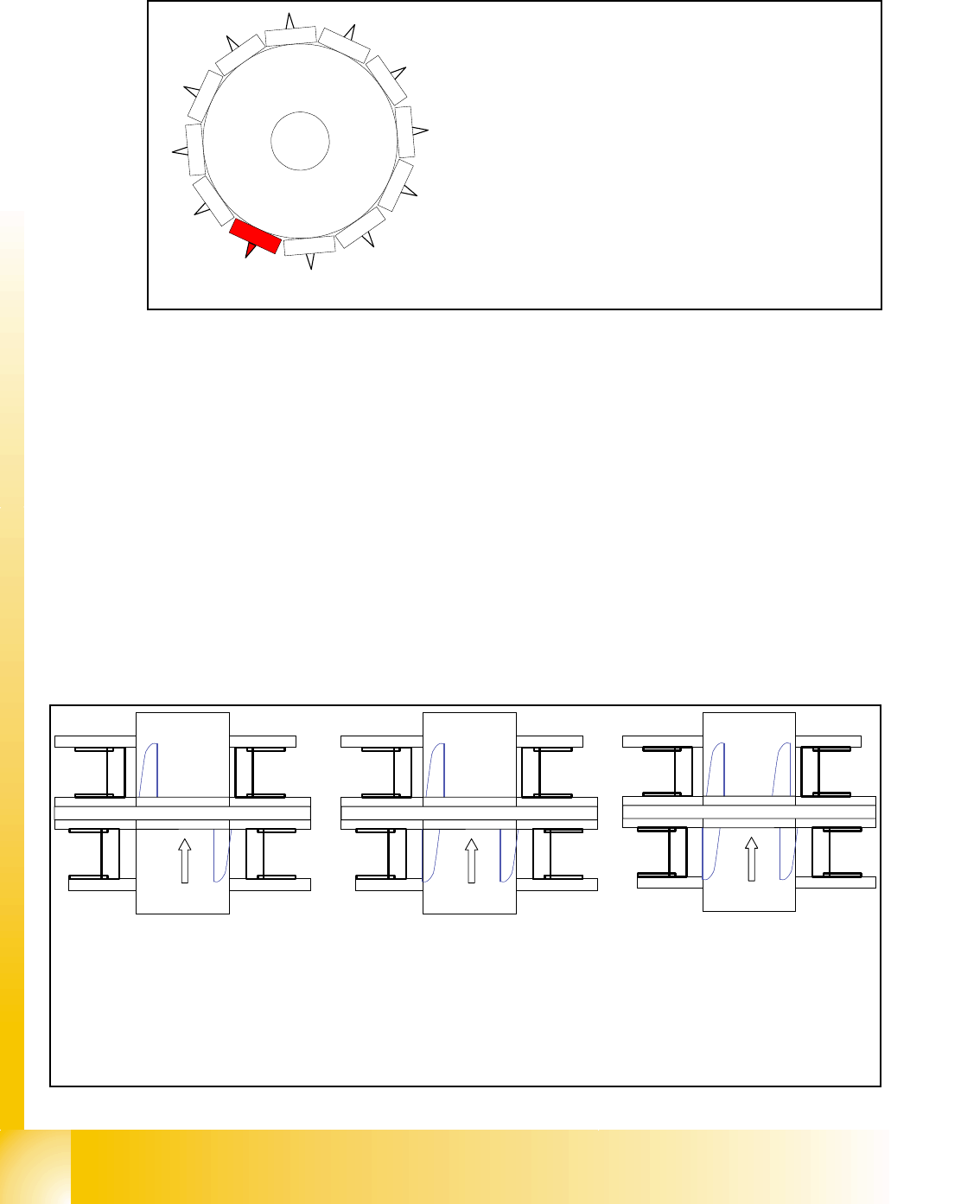
6.3.3 PCB position recognition and temperature compensation
The PCB recognition is necessary to determined the correct position of the PCB in the machine
(Transport --> Placement area).
It should be two fiducials on each PCB minimum. With this two fiducial we are able to determined
the X/Y position and the angle of the PCB in the transport. The fiducials shouldn‘t be in one line
on the PCB.
Up to 3 fiducials can program for the PCB recognition. With the third fiducial, we determined ad-
ditional to the position of the PCB the geometric data of the PCB layout, that means is the PCB
stretch.
The Siplace X machine increase the accuracy, so that we make additional to the PCB recognition
a temperature compensation with the second gantry in the placement area.
1
2
1
1
1
0
9
8
7
6
5
1
2
3
4
the Star-axis is turned to home position.
When the X- and Y-axis is in waiting position
Star position:
15 degrees
Digit: 15.000
1 degree is equivalent to 1000 digits
TSP
30
1
Gantry 1
Gantry 3
Gantry 4
Siplace X 3
TSP
30
1
Gantry 1
Gantry 3
Gantry 4
Transport
direction
Siplace X 4
Gantry 2
TSP
30
1
Gantry 1
Gantry 2
Siplace X 2
Transport
direction
Transport
direction
Gantry 1 and 2 PCB recog-
nition with max. 3 fiducials
Gantry 4 PCB recognition with
max. 3 fiducials Gantry 3 with
2 fiducials
Gantry 1 temperature compensa-
tion with the fiducials.
Gantryl 4 PCB recognition with
max. 3 fiducials Gantry 2 with
2 fiducials
Gantry 1 and 3 temperature com-
pensation with the fiducials.
1 - 29
Student Guide SIPLACE X
Edition 09/2005 6 Collect &Place-Head 6/12
29
Fig. 6.3 - 3 PCB position recognition run to the PCB nominal position
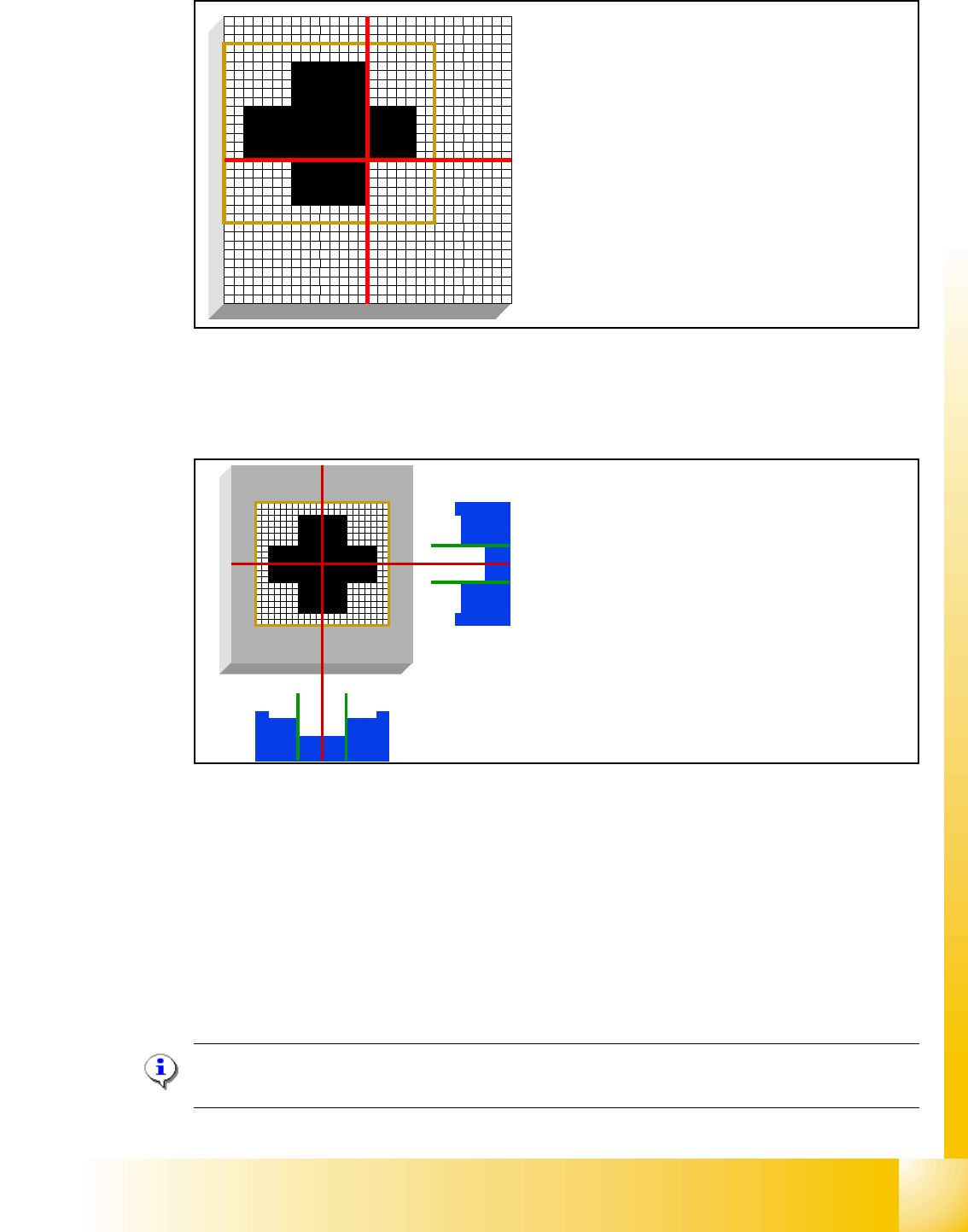
6.3.4 PCB position recognition centering of the PCB fiducials
Fig. 6.3 - 4 PCB position recognition centering of the PCB fiducials
– The camera takes the picture of the second fiducial and the vision system calculates the center
position of this picture.
– The 2nd calculation is the deviation between nominal and calculated fiducial position.
– All board fiducials are optically centered with this procedure.
– This data is sent to the machine controller
– The correction values are calculated for the X, Y and the angular position of the PCB .
– Now the gantry axes move the placement head to the first pick up position
Please Note If synthetic fiducials are used nothing change on the described sequence. The only
thing what change: the Inkspot recognition could be done after fiducial recognition.
The fiducial is expected at this nominal position.
The PCB camera is moved from waiting position
to this fiducial position.
– PCB position recognition is done before the
first component is picked up.
– The gantry axes move the PCB camera to the
theoretical fiducial position. The camera
takes the picture of the first fiducial and the vi-
sion system calculates the center position.
The centered fiducial define now the actual
position of the board.