SiplaceX4_en.pdf - 第400页
1 - 34 S tudent Guide SIPLACE X 8 Collect&Place-Head 20 Edition 09/2005 34 8.3.9 Picking Up the 1 1th Component Fig. 8.3 - 9 Picking up the 1 1th component 8.3.10 Picking Up the 12th Component Fig. 8.3 - 10 Picking u…
1 - 33
Student Guide SIPLACE X
Edition 09/2005 8 Collect&Place-Head 20
33
8.3.7 Picking Up the First Component
Fig. 8.3 - 7 Picking up the first component
The remaining nozzles now pick up the components as the star is stepped and turn these into the
correct centering angle, before they reach the component camera.
Note: All Vacuum measurements during the placement process are making in the background
and don‘t produce an error messages. The error messages about missing components or somth-
ing like that, will produce only from the component sensor.
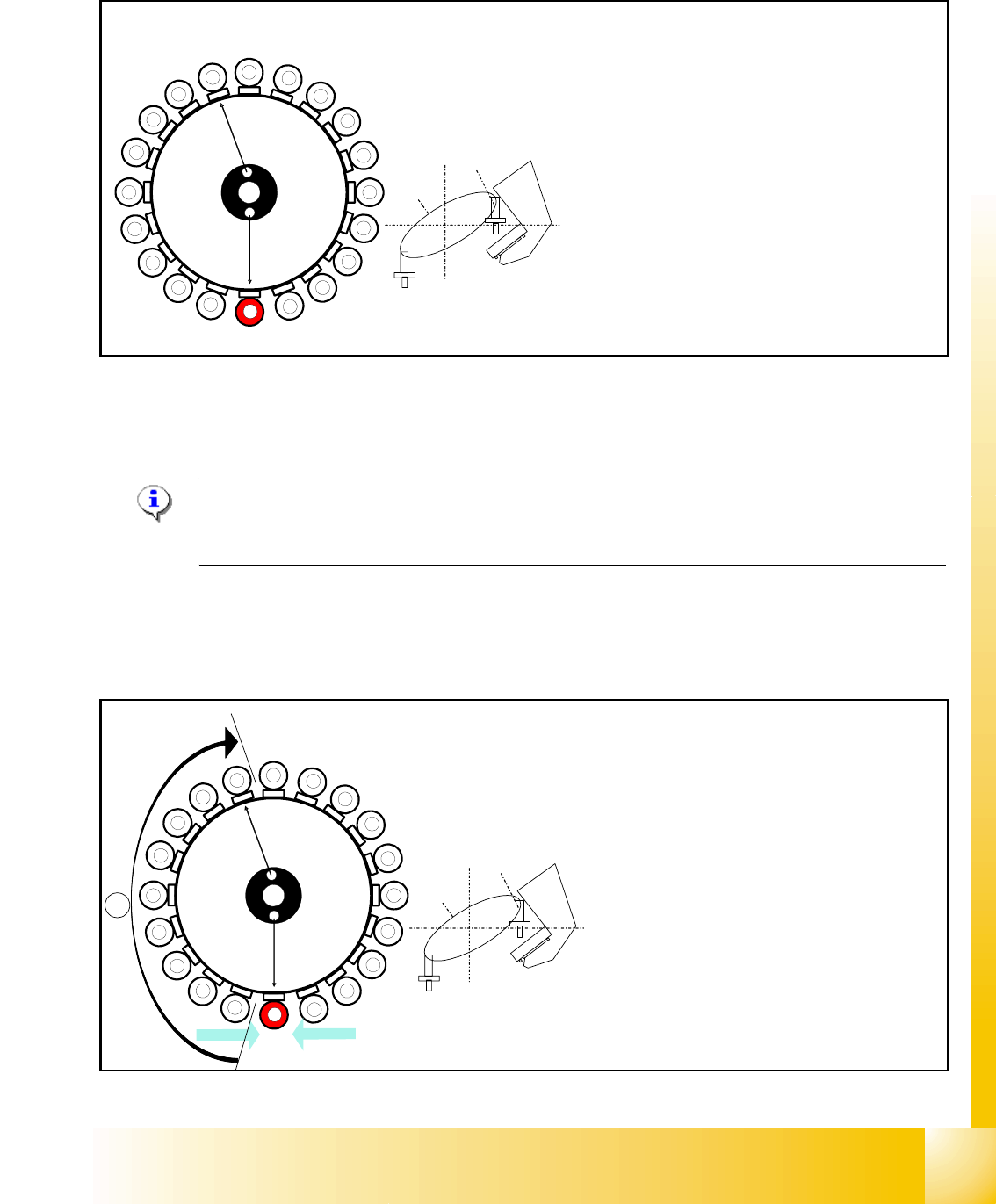
8.3.8 Picking Up the 10th Component
Fig. 8.3 - 8 Picking up the 10th component
Star position 0°
– Vision system: no action
– Pick up / placement station: pick up first
component
– Z-axis downwards
– Vacuum check for component pickup
– Component sensor: direct measurement
after picking up the first component (ap-
plies accordingly to all other segments)
– Vacuum check after pickup: check holding
force of the component on the nozzle.
1
2
3
4
5
6
7
8
9
10
12
11
13
14
15
16
17
18
19
20
Segment 1
Segment 11
S
t
a
r
p
o
s
i
t
i
o
n
CO-Camera
10
CO - Sensor
CO - Sensor
Segment 10
Segment 20
S
t
a
r
p
o
s
i
t
i
o
n
CO- Camera
1
2
3
4
5
6
7
8
9
11
12
13
14
15
16
17
18
19
20
A
Star position 162°
– Vision system: prepare SIPLACE Vision
for optical centering.
– Pickup/placement station:
pick up the 10th component
–
A : The components previously picked up
are rotated to the centering angle. (center-
ing angle [0°, 90°, 180°, 270°] = place-
ment angle in 90° steps)
– Measurement of hold circuit for segment 1
(output to measuring sensor)
1 - 34
Student Guide SIPLACE X
8 Collect&Place-Head 20 Edition 09/2005
34
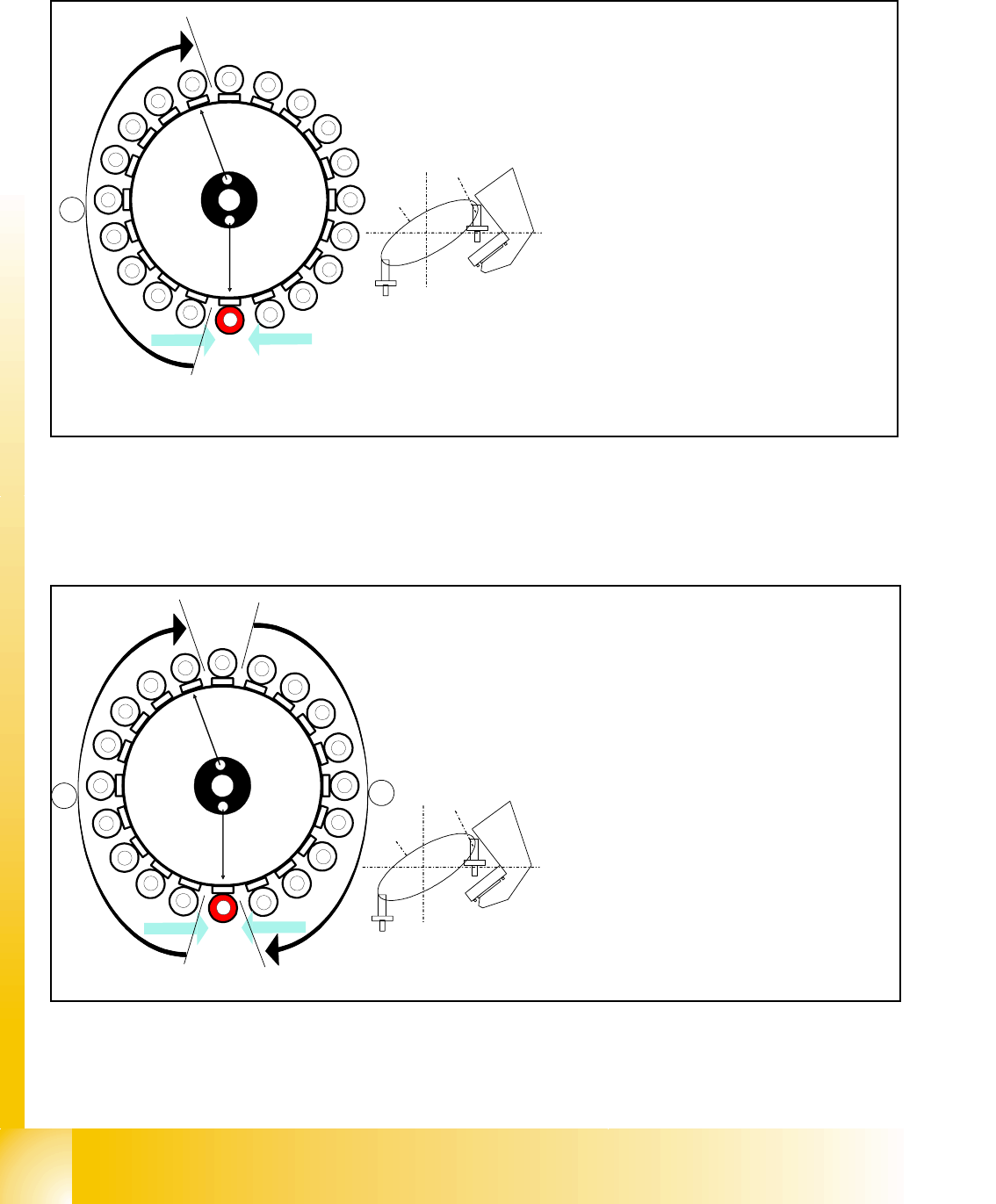
8.3.9 Picking Up the 11th Component
Fig. 8.3 - 9 Picking up the 11th component
8.3.10 Picking Up the 12th Component
Fig. 8.3 - 10 Picking up the 12th component
CO - Sensor
CO - Sensor
Segment 11
Segment 1
S
t
a
r
p
o
s
i
t
i
o
n
CO- Camera
11
12
13
14
15
16
17
18
19
1
2
3
5
6
7
8
9
10
4
20
A
Star position 180°
– Vision system: optical centering of com-
ponent on segment 1.
– Pickup/placement station:
pick up the 11th component
–
A : The components previously picked
up are rotated to the centering angle,
here. Empty nozzles are turned to the
next pickup angle.
– Measurement of hold circuit for segment
2
CO - Sensor
CO - Sensor
Segment 12
Segment 2
S
t
a
r
p
o
s
i
t
i
o
n
CO- Camera
11
12
13
14
15
16
17
18
19
1
2
3
5
6
7
8
9
10
4
20
A
B
Star position 192°
– Vision system: optical centering of com-
ponent on segment 2 of this gantry
– Pickup/placement station:
pick up the 12th component
–
A : The components previously picked
up are rotated to the centering angle,
here.
–
B : The components are adjusted to their
placement angles, here.
– Measurement of hold circuit for segment
3
1 - 35
Student Guide SIPLACE X
Edition 09/2005 8 Collect&Place-Head 20
35
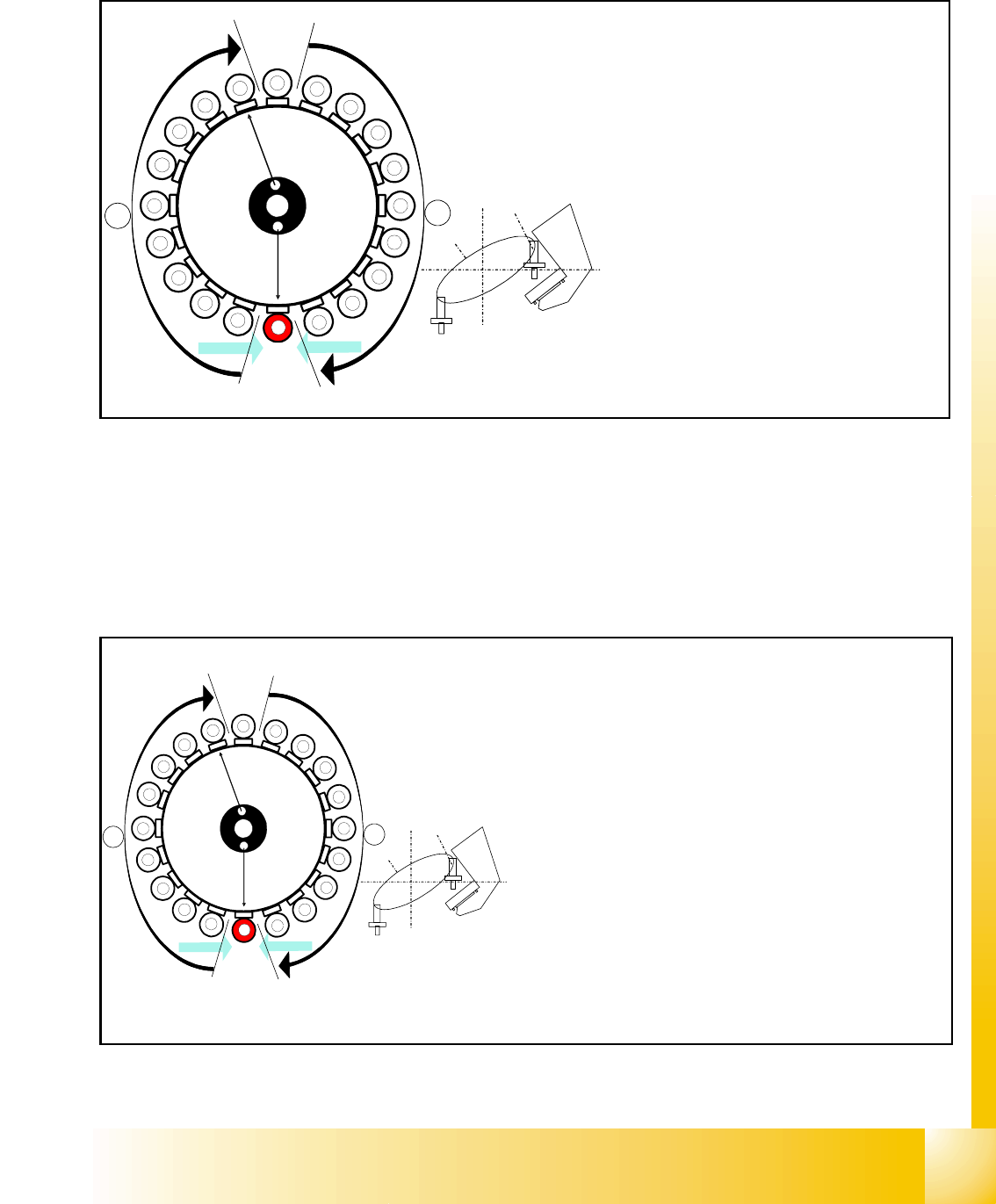
8.3.11 Picking Up the 13th Component
Fig. 8.3 - 11 Picking up the 13th component
The process continues with the remaining components being picked up, centred and turned to the
correct or corrected placement angle.
8.3.12 Picking Up the 20th Component
Fig. 8.3 - 12 Picking up the 20th component
CO - Sensor
CO - Sensor
Segment 13
Segment 3
S
t
a
r
p
o
s
i
t
i
o
n
CO-
Camera
11
12
13
14
15
16
17
18
19
1
2
3
5
6
7
8
9
10
4
20
A
B
Star position 210°
– Vision system: optical centering of the
3rd component
– Pickup/placement station:
pick up the 13th component.
–
A : The components previously picked
up are rotated to the centering angle,
here.
–
B : The components previously cen-
tered are adjusted here to their place-
ment angles.
– Measurement of hold circuit for segment
4
CO- Sensor
CO - Sensor
Segment 20
Segment 10
S
t
a
r
p
o
s
i
t
i
o
n
CO- Camera
9
8
7
6
5
4
3
2
1
19
18
17
15
14
13
12
11
10
16
20
A
B
Star position 342°
– Vision system: optical centering of the 10th comp.
– Pickup/placement station:
pick up the 20th component.
– Communication with the component table:
cutter enabled
– Synchronization: after picking up the 20th compo-
nent, this gantry waits for positioning enable from
the other Y-axis controller
– Component sensor:
During the next star step, component presence/
height check is performed for segment 1.
–
A, B (see previous chapter).