SiplaceX4_en.pdf - 第666页
SIPLACE X Edition 09/2005 Appendix 11 – The deviation of position signal of the respec tive Axes are (without any further action) dis- played and analysed on the SA T LCD-Display . The Positioning time is the ’ whole tra…
Edition 09/2005 SIPLACE X
Appendix
10
20.3.3 Assessing the Axis Dynamic Signal (also for ’Beginner’Mode)
The SIPLACE Axis Tester uses the (signal) option 1 menu as a default for displaying axis dynamic
signals. To reconfigure this setting please refer to Fig. 20.3 - 1, Chapter 20.3.2.1.
Adjusting the
tacho: The ta-
cho signal is di-
rectly
connected
from the servo/
adjustment
board pins to
the oscillo-
scope input.
Assessing the
positioning
quality:
Measuring the
traversing
time/over-
shoots.
Fig. 20.3 - 6 SAT’ operating sequence
The sequence of steps for setting the axis dynamic depends on the operating sequence and con-
nection descriptions for the relevant machine type.
20.3.3.1 Default Terminal Assignment of SAT BNC Outputs for Assessment of Dynamics
– V
nom
. is emitted at the SAT BNC output 1.
– SAT BNC output 2 supplies the nominal current for an AC axis with
Vreg (uncommuted current
signal). However, this is only connected for AC star axes with full digital control. The oscillo-
scope input CH3 can be used for this
Vreg signal. For both DC (Z, DP) and "analog AC"(X,Y)
axes CH3 is free for
I
actual
servo current signals.
–A
I
nom
signal (force output at axis controller/at the axis test box) is provided at BNC output 3.
This is the additional acceleration signal for the gantry axes or the force limitation signal for the
Z-axis.
– A connection for the
end signal is provided at SAT BNC output 4. This signal is generally used
as a trigger signal (exeption Z-Axes).
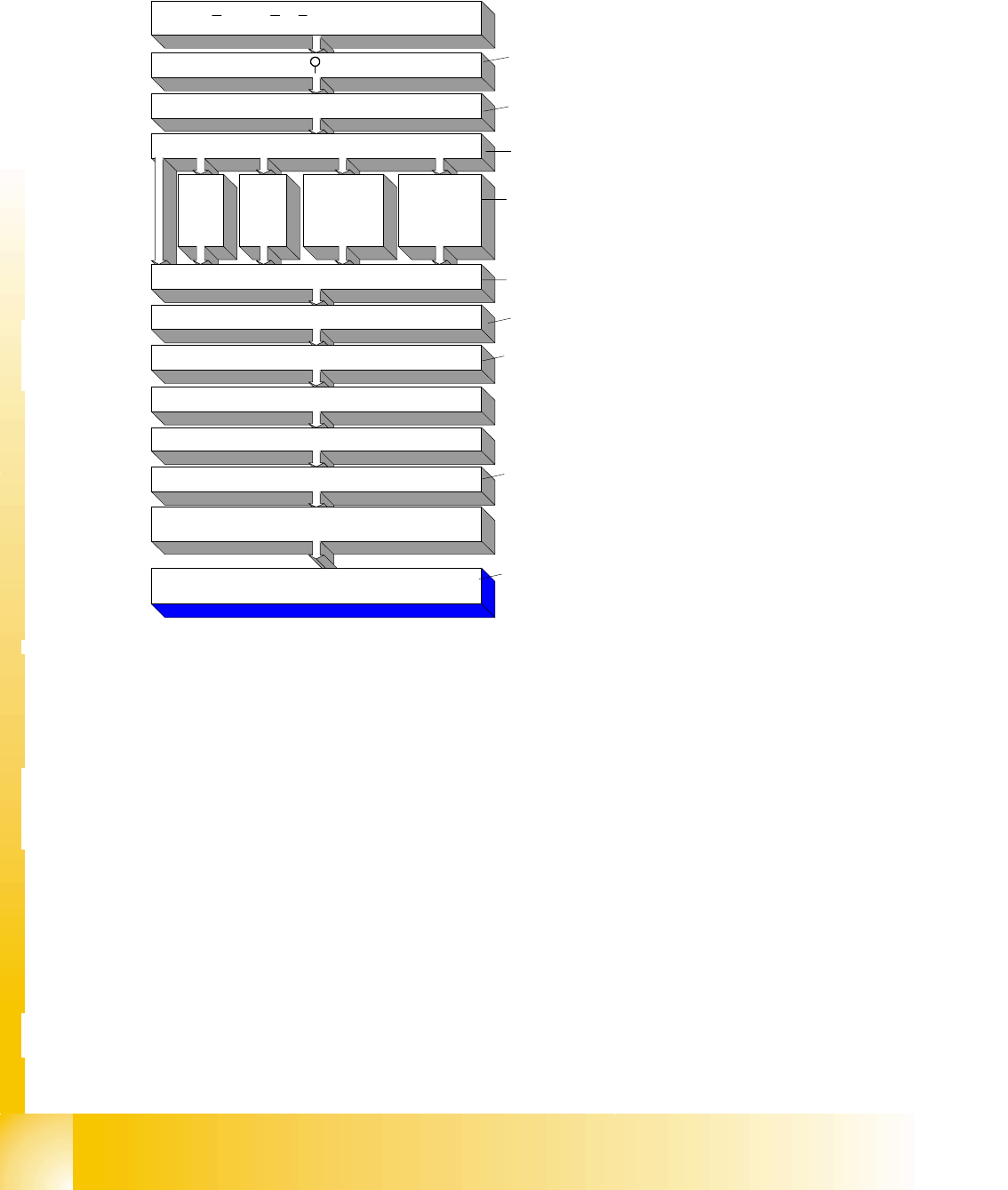
connect SIPLACE Axis Tester SAT to respective Axis
controller board
Boot the SAT and press to activate Main menue
Select 'Machine' (platform)
Selection from: C- / HF- / S- or F- or HS-Machine
HF on top/S-Types/
F-Types/HS-Types at bottom
with cursors up/down
and confirm <-
|
The menu 'back'(quit) returns
back to the previous menu
HF .
HF/3
HF/4
(F3*) top
F4 / F5 /
F5 HM
(WPC*) bot
CS
CF
(G/S15*)top
S20/
(S23)S25H
M / S27HM
Select Axis type
with cursors up/down or
left/ right and confirm <-
|
Select menu 'adjust Panel'
to get the Axis dynamic signals of the re-
spect. Axiscontroller to the BNC-connectors
Select 'Positioning quality'
after the first positioning press 'return' <-
|
to get ...
Select 'Oscilloscope-mode'
Select 'Signal line e.g. 3'
press 'return <-
|
again and select 'back' up to the new
menu you want
you get the signals at the BNC
outputs and the deviation of position
and time analysis at the SAT screen
For an axis on a different axis controller board -dis-
connect and select the meus described above again
.... get the signals and the deviation
of position at the BNC outputs
with cursors up/down
and confirm <-
|
* adapter f. Axis c. necessary
to connect SAT easier to the same axis control
-
ler type this last AC-test menu is saved.
SIPLACE X Edition 09/2005
Appendix
11
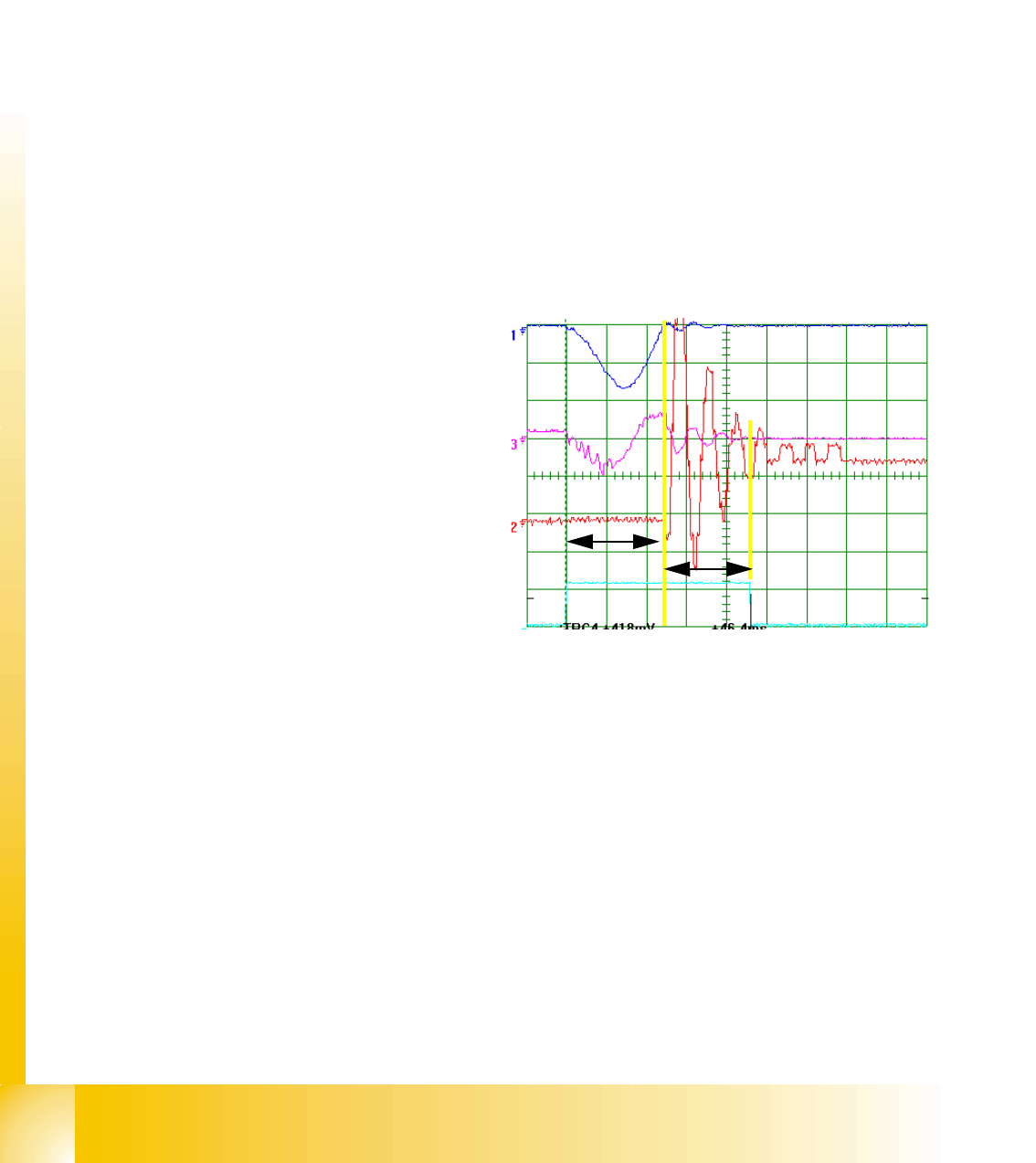
– The deviation of position signal of the respective Axes are (without any further action) dis-
played and analysed on the SAT LCD-Display.
The
Positioning time is the ’whole travel time of a positioning’ (Start signal to End signal).
The
Control time is the time from start to the first arrival at the target position.
The
Pull off Time is the time to control the generated overshoots down to limits.
Positioning time = Control time + Pull OFF time
– With ’Return’ <
_|
, ’Oscilloscope-Mode’, and ’Signal line (2 or) 3’ we connect the deviation of
position signal of the respective Axis to the SAT BNC output. We can measure with the free
Osci-input CH2 (CH3) the deviation of position signal synchronous to the other dynamic sig-
nals.
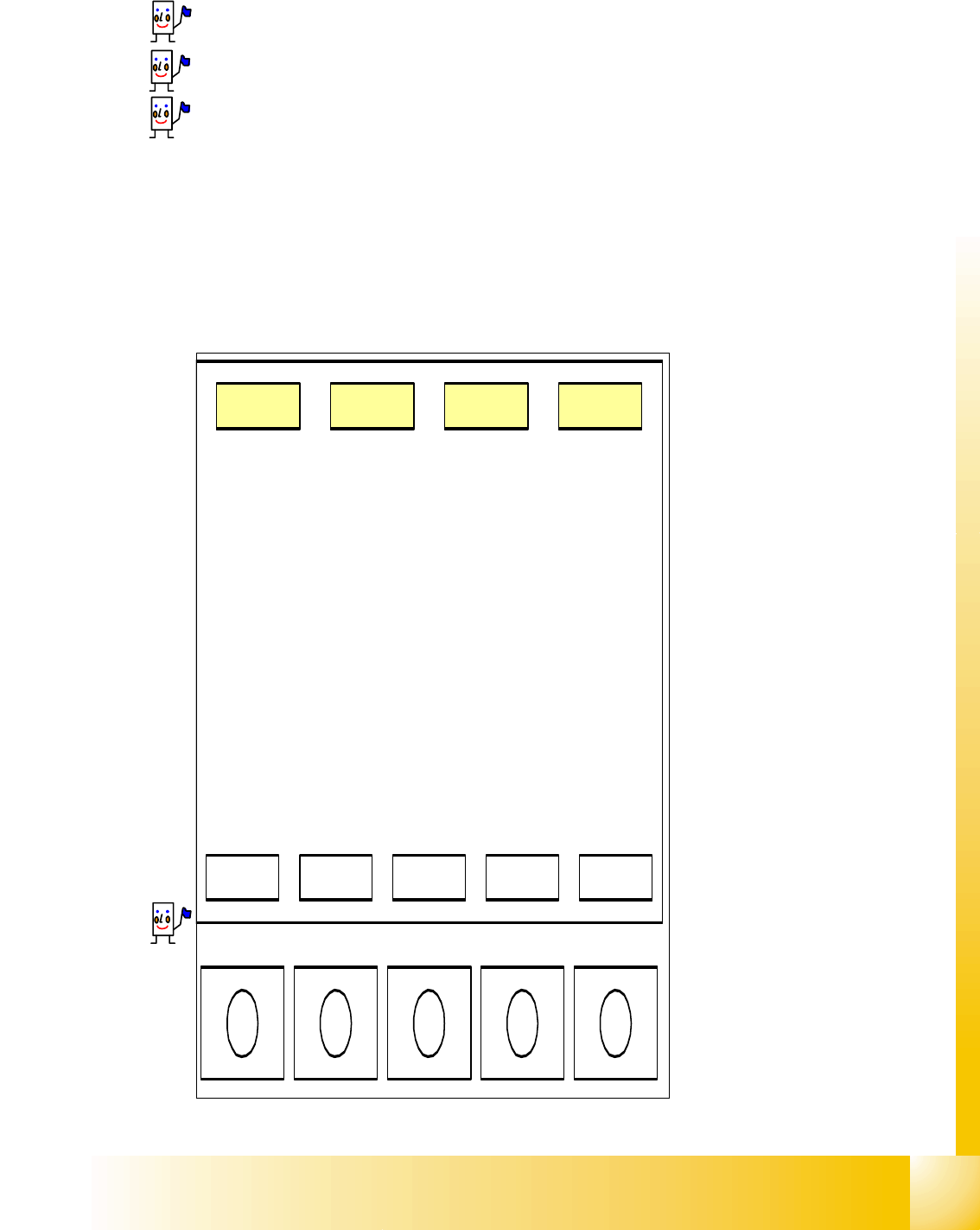
20.3.3.2 SIPLACE Axis Tester ’SAT’ Display
The diagram in the SAT display
shows a typical overshoot (as in
Fig. 20.3 - 7 at the top) and the
corresponding analysis
times.The delays between posi-
tionings should be set long
enough to allow the values to be
read and assessed.
Confirm with <
_|
and select ’PWM
mode’ and ’dynamic’ to display
the position deviation signal on
the oscilloscope. If no overshoot
occurs during the positioning pro-
cess (see Fig. 20.3 - 7 at the bot-
tom) (asymptotic approach), the
positioning time (pos) and the
control time (CTRL) will be
switched simultaneously. There
is therefore no
’pull off time’
(pull off)
during which the over-
shoot is corrected.
PLEASE NOTE:
The display is automatically
scaled to the overshoot size and
time!
Fig. 20.3 - 7 Times and position devia-
tions for a positioning process with/with-
out overshoot
B1 B2 B3 B4 B5
Edition 09/2005 SIPLACE X
Appendix
12
Display text components
Samples scans often ’511’ (independent of the scan period setting at ’Time’)
(Closure) Time is the smallest time unit for representation of overshoots (scan period) on the dis-
play. Can be reduced with B1 (display is prolonged and details are enlarged) or increased with B2
(display is shortened and whole picture is visible). Adjustment range 0.1 ms to 5 ms.
Axis type at the display
(Grain) Scale is the pixel grouping of a sample (scan period) or digit on the display. 3 / 14 means
that scanning - the time unit entered at Time - will always appear on the screen with a length of 3
(fixed) pixels. A digit position deviation is 14 (dynamic) pixels in this case.
Scope the extent of a maximum positive or negative overshoot
(Time) Range is the signal duration as seen on the screen (alters in line with the ’Time’ setting).
Overshoot!! This is the Position of the axis at the moment of the End signal!
This show you how many Digit has the axis to move after End signal to get really
in target position.
Below the signal you will see a combination of numbers from which one can see at which part
of the overshoot scan the display begins
)
(e.g.
250/511 250th scan overshoot of 511
total scans (pos. 511 = pos.0)
Pull off time is the time measured for the
axis controller to correct the overshoot(s).
(2
Ctrl. Control time is the time needed by
the axis to reach the target position for the
first time. (1)
Pos. Positioning time is the time from axis
start to issuance of the end signal at target
position achievement with reliable position
deviation. Add (1) and (2).
20.3.3.3 Positioning Time Submenus
More specific analyses of the positioning sequence can be performed with the aid of these menus.
After recording a positioning procedure, press <-
|
Return to open the submenu.
(PWM mode version 1.0) Oscilloscope mode:
The version 1 designation stems from the pulse amplitude modulation used for the representation
of overshoots. It is switched synchronously to the other position deviation signals for the SAT over-
shoot counter, on the oscilloscope.
Start FFT:
The swivel-in process for a particular position can be analyzed with the aid of a frequency spec-
trum. After a positioning procedure, select ’FFT’ (Fast FourierTransformation) to display the
swivel-in spectrum on the screen.
Start Plot:
This menu facilitates measurement of the position deviation signal on the SAT screen, similar to
a
s