SiplaceX4_en.pdf - 第91页
1 - 15 S tudent Guide SIPLACE X Edition 09/2005 3 Communication and Control 15 3.3.7 CAN Bus Pro cessor Board C&P Head Can bus processor board TQM 167 LC is mounted on the head boa rd C500. The processor board is use…
1 - 14
Student Guide SIPLACE X
3 Communication and Control Edition 09/2005
14
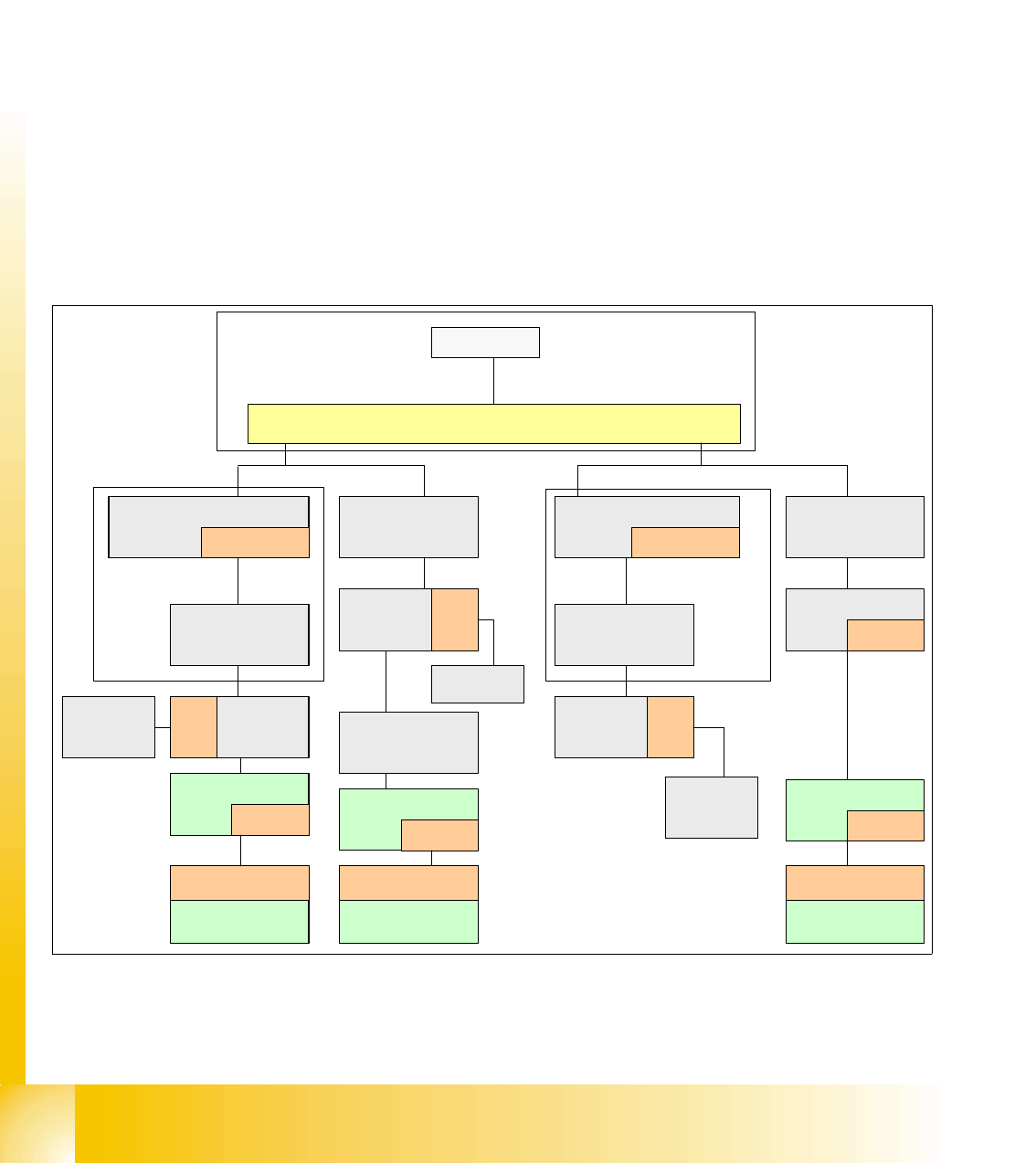
3.3.6 CAN-Bus Concept with One Wire Bus e.g. SiplaceX3
The placement machine SIPLACE HF/HF3 uses with the Software 505 an additional bus system,
which are integrated into the CAN Bus cable --> One Wire Bus.
With the Siplace X-machine the One Wire Bus is integreted in a separate CAT5 cabel, which start
from the Main- and Subdistributor up to the trailling interface. On the Main- and Subdistributor are
installed the control unit of the one wire system. A kind of switch are located on the other units
which required the one wire system (see figure below). This switch open and close the communi-
cation path.
Controlled components with the ONE Wire Bus:
– Nozzle changer of the C&P heads
– Temperature sensors
– Gantry recognition (CFK02, CFK04, CFK06)
– Option Reject Box
Fig. 3.3 - 14 General overview CAN-Bus with One Wire Siplace X3
Cat 5 (english category), is a Twisted-Pair-cabel, for data tranfer.
SMP BUS
MC
MC
Axis unit
PA 1
CAN Bus cable
Computer Unit
CAN E/
A
Modu
l
Sektor
4
CAN E/
A
Modu
l
Sektor
4
CAN E/
A
CAN I/O
SUB Modul
Sektor 4
COT 1
Tape cutter
SUB Distributor Sector 4
Main Distributor Sector 2
C
O
M
U
n
i
t
x
6
p
n
x
7
p
n
CAN Bus cable
One Wire
"Control unit"
One Wire
"Switch"
CAN Bus cable
with One Wire
COT 4
Tape cutter
Vision
Control unit
Sector 4
Trailing
cable-
Interface
Gantry 4
One Wire
"Switch"
Temperature sensor
Gantry recognition
One Wire
"Head interface"
Temperature sensor
Gantry recognition
One Wire
"Head interface"
Axis unit
PA 2
COT 3
Tape cutter
One Wire
Hub
One Wire
"Switch"
Temperature sensor
Gantry recognition
One Wire
"Head interface"
CAN I/O
Main Modul
Sector 2
One Wire
"Control unit"
CAN Bus cable
with One Wire
Transport
Control
unit
Nozzle
changer A/B
COT 2 / MTC
Tape cutter
Vision
Control unit
Sector 2
Nozzle
changer A/B
One Wire
Hub
One Wire
Hub
Nozzle
changer A/B
One Wire
Hub
Trailing
cable-
Interface
Gantry 1
Trailing
cable-
Interface
Gantry 3
1 - 15
Student Guide SIPLACE X
Edition 09/2005 3 Communication and Control
15
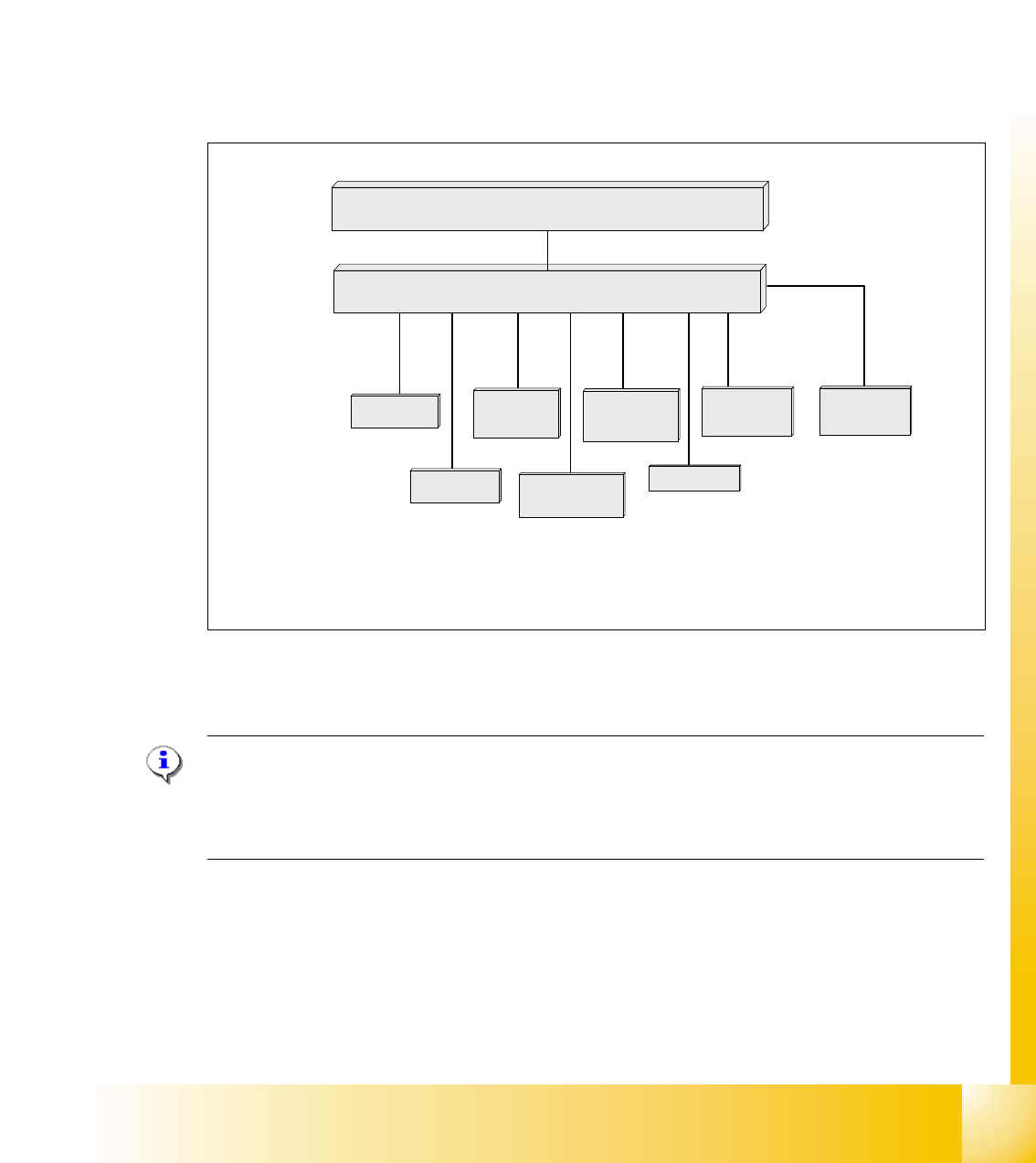
3.3.7 CAN Bus Processor Board C&P Head
Can bus processor board TQM 167 LC is mounted on the head board C500. The processor board
is used at different places in the machine.
If the processor board on the head board, the firmware provides at the processor board the control
of the head specific actors and sensors no matter which head type is installed.
3.3.7.1 CAN Bus controlled function on 6/12C&P Head
The following overview shows various head functions, controlled by the CAN system. Thus, the
CAN bus controls the actuators and sensors of the C&P Head.
Fig. 3.3 - 15 CAN function on C&P Head
NOTE:
The status of the 16 Bit PROCESSOR BOARD is indicated on the 7-segment display.
Normal status on the diplay is: Display shows slowly flashed " . "
(Description of the 7-segment display see chapter C&P Head).
Comp.-sensor
CAN Bus 16 bit Processor Board
stepper motor
reject
:
LS top
LS bottom solenoid valve
air kiss
:
CAN bus
stepper motor
swivel in Dp
stepper motor
pick up / place
Vacuum values
Communication Board
LS = Light barrier
1 - 16
Student Guide SIPLACE X
3 Communication and Control Edition 09/2005
16
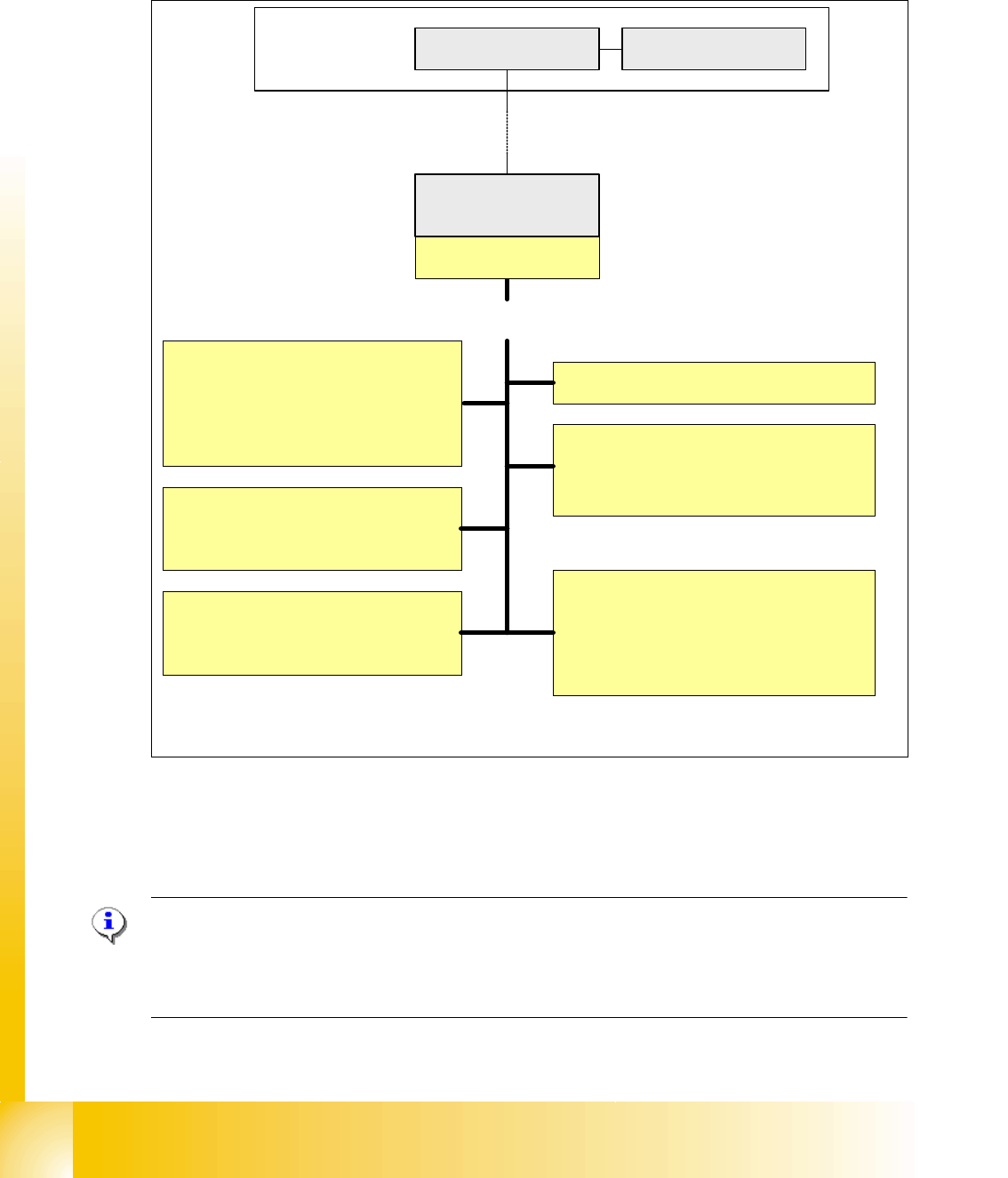
3.3.7.2 CAN-Bus controlled function on C&P 20 Kopf
The following overview shows various head functions, controlled by the CAN system. Thus, the
CAN bus controls the actuators and sensors of the C&P Head.
Fig. 3.3 - 16 Communication TQM Modul on the C&P 20 head
NOTE:
The status of the 16 Bit PROCESSOR BOARD is indicated on the 7-segment display.
Normal status on the diplay is: Display shows slowly flashed " . "
(Description of the 7-segment display see chapter C&P Head).
Pick up/Placement position
1. Adjust vacuum/air kiss
2. Measurement vacuum/air kiss
3. Reject function
Holding circuit
1. Monitoring vacuum
2. Measurement vacuum
Component Sensors
1. Initialization
2. Calibration
EEPROM
1. Zero point correction Z-axis
2. Zero point correction Star-axis
3. other head specific data
Computer Unit
COM Board
Machine- CAN Bus
(1MBit/s)
MC
Head processor
C500
TQM-module
Light barrier bottom
1. Activate the light barrier
Function control light barrier bottom
directly on the axis controller A363
Control Head-Can Bus
Control of the following functions
Function control component
sensor directly on the axis
controller A363
TQM = TQ Company name
M = module
TQM = 16 bit processor