sh030106u.pdf - 第114页
3. SIG NALS A ND WIRI NG 3 - 37 (3) Encoder output pulses DO-2 (diff erentia l lin e driver typ e) (a) Interface Maximum output curr ent: 3 5 mA 150 Ω 100 Ω Am26LS32 or equivalent Servo amplifier LA (LB, LZ) LAR (LBR, LZ…
3. SIGNALS AND WIRING
3 - 36
3.8.2 Detailed explanation of interfaces
This section provides the details of the I/O signal interfaces (refer to the I/O division in the table) given in
section 3.5. Refer to this section and make connection with the external device.
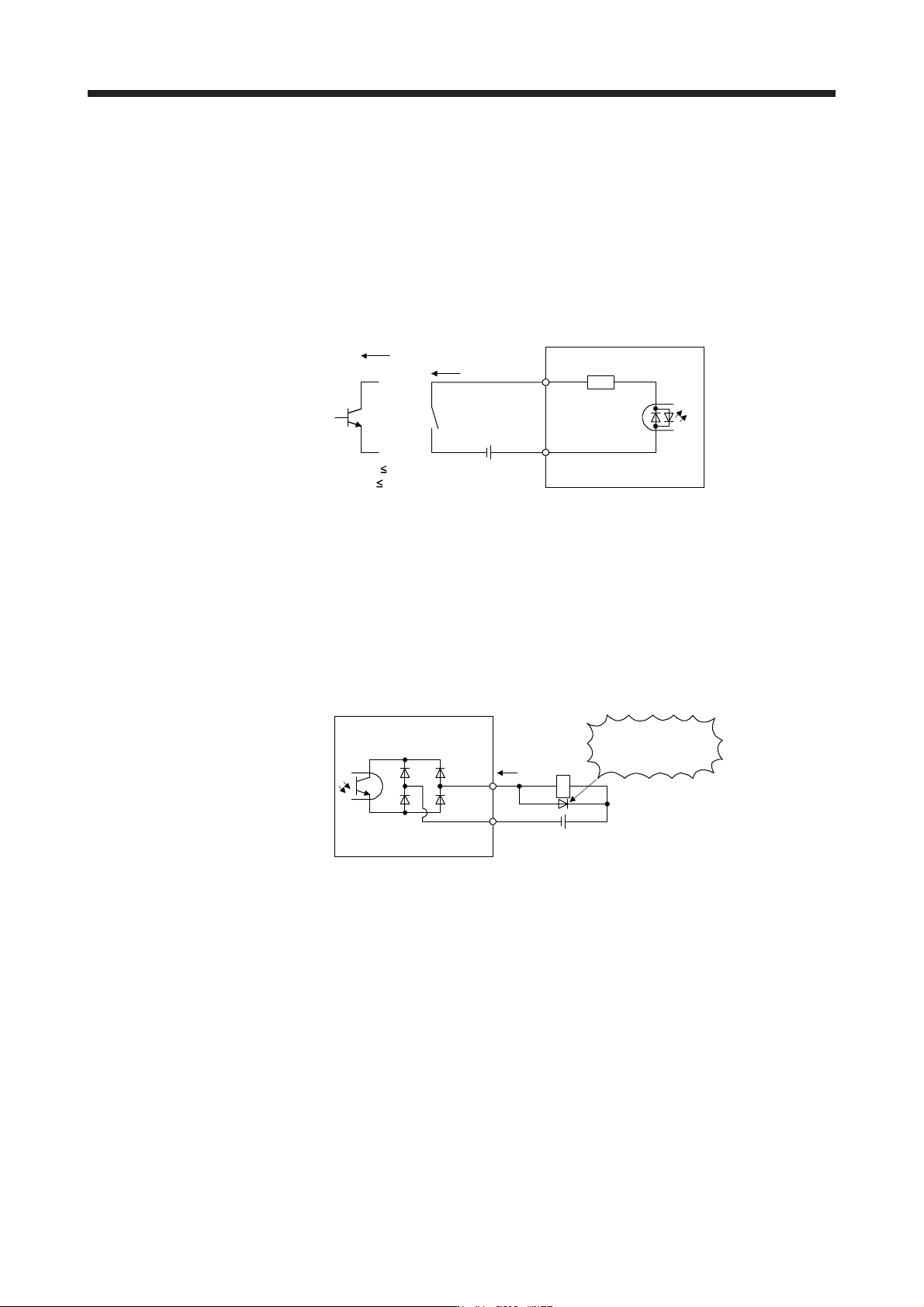
(1) Digital input interface DI-1
This is an input circuit whose photocoupler cathode side is the input terminal. Transmit signals from sink
(open-collector) type transistor output, relay switch, etc. The following is a connection diagram for sink
input. Refer to section 3.8.3 for source input.
Approximately
6.2 kΩ
Approximately
5 mA
V
CES
1.0 V
I
CEO
100 µA
TR
24 V DC ± 10%
300 mA
Switch
For transistor
EM2,
etc.
Servo amplifier
DICOM
(2) Digital output interface DO-1
This is a circuit in which the collector of the output transistor is the output terminal. When the output
transistor is turned on, the current will flow to the collector terminal.
A lamp, relay or photocoupler can be driven. Install a diode (D) for an inductive load, or install an inrush
current suppressing resistor (R) for a lamp load.
(Rated current: 40 mA or less, maximum current: 50 mA or less, inrush current: 100 mA or less) A
maximum of 2.6 V voltage drop occurs in the servo amplifier.
The following shows a connection diagram for sink output. Refer to section 3.8.3 for source output.
(Note) 24 V DC ± 10%
300 mA
If polarity of diode is
reversed, servo amplifier
will malfunction.
Servo amplifier
ALM,
etc.
Load
DOCOM
Note. If the voltage drop (maximum of 2.6 V) interferes with the relay operation, apply high
volta
g
e
(
maximum of 26.4 V
)
from external source.
3. SIGNALS AND WIRING
3 - 37
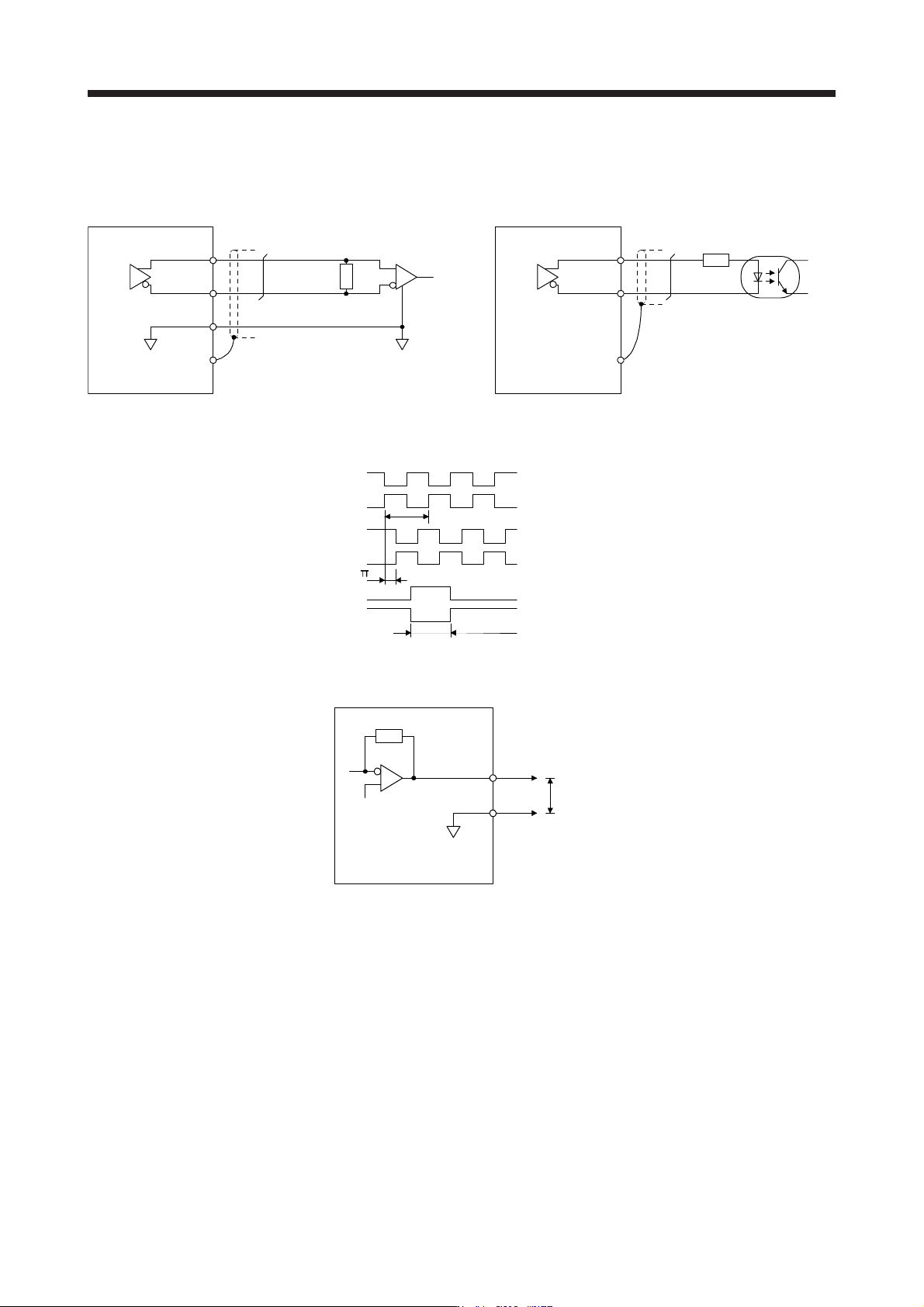
(3) Encoder output pulses DO-2 (differential line driver type)
(a) Interface
Maximum output current: 35 mA
150 Ω
100 ΩAm26LS32 or equivalent
Servo amplifier
LA
(LB, LZ)
LAR
(LBR, LZR)
SD
LG
High-speed photocoupler
Servo amplifier
LAR
(LBR, LZR)
SD
LA
(LB, LZ)
(b) Output pulse
/2
LAR
T
Servo motor CCW rotation
Time cycle (T) is determined by the settings of
[Pr. PA15] and [Pr. PC03].
LA
LB
LBR
LZ
LZR
400 µs or more
(4) Analog output
LG
MO1
(MO2)
Servo amplifier
Output voltage: ±10 V
Maximum output current: 1 mA
Resolution: 10 bits or equivalent
Note. Output volta
g
e ran
g
e varies dependin
g
on the output contents.
3. SIGNALS AND WIRING
3 - 38
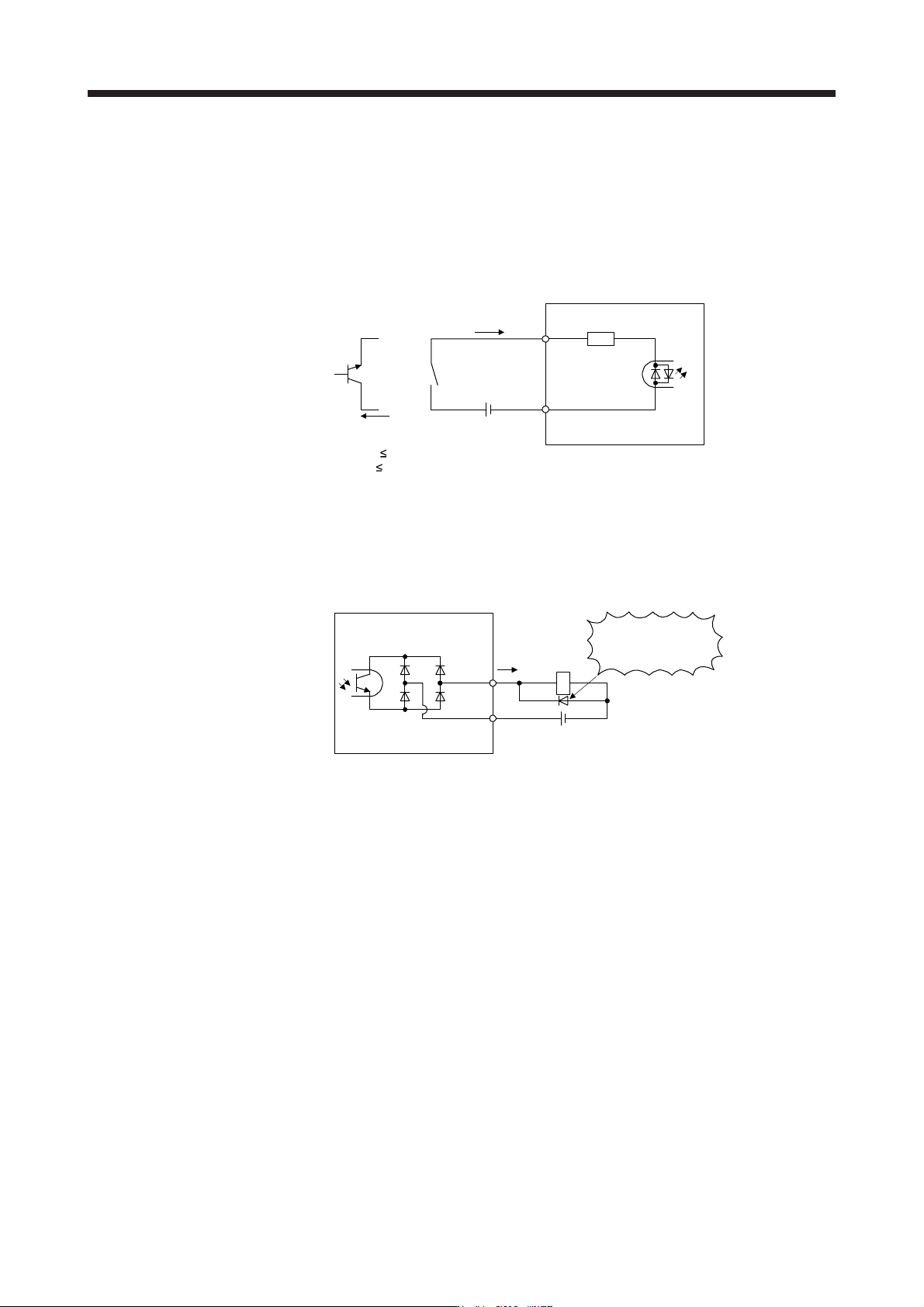
3.8.3 Source I/O interfaces
In this servo amplifier, source type I/O interfaces can be used.
(1) Digital input interface DI-1
This is an input circuit whose photocoupler anode side is the input terminal. Transmit signals from source
(open-collector) type transistor output, relay switch, etc.
V
CES
1.0 V
I
CEO
100 µA
Approximately
6.2 kΩ
DICOM
For transistor
Approximately
5 mA
TR
24 V DC ± 10%
300 mA
Switch
EM2,
etc.
Servo amplifier
(2) Digital output interface DO-1
This is a circuit in which the emitter of the output transistor is the output terminal. When the output
transistor is turned on, current will be applied from the output to a load.
A maximum of 2.6 V voltage drop occurs in the servo amplifier.
(Note) 24 V DC ± 10%
300 mA
If polarity of diode is
reversed, servo amplifier
will malfunction.
Servo amplifier
ALM,
etc.
Load
DOCOM
Note. If the voltage drop (maximum of 2.6 V) interferes with the relay operation, apply high
volta
g
e
(
maximum of 26.4 V
)
from external source.