sh030106u.pdf - 第151页
5. PARAMETE RS 5 - 6 5.1.4 I/O sett ing para meters ([Pr. PD _ _ ]) No. Symbol Name Initial value Unit Operation mode Standard Full. Lin. D.D. PD01 For manufacturer s etting 0000h PD02 *DIA2 I nput signal aut omatic on s…
5. PARAMETERS
5 - 5
No. Symbol Name
Initial
value
Unit
Operation
mode
Standard
Full.
Lin.
D.D.
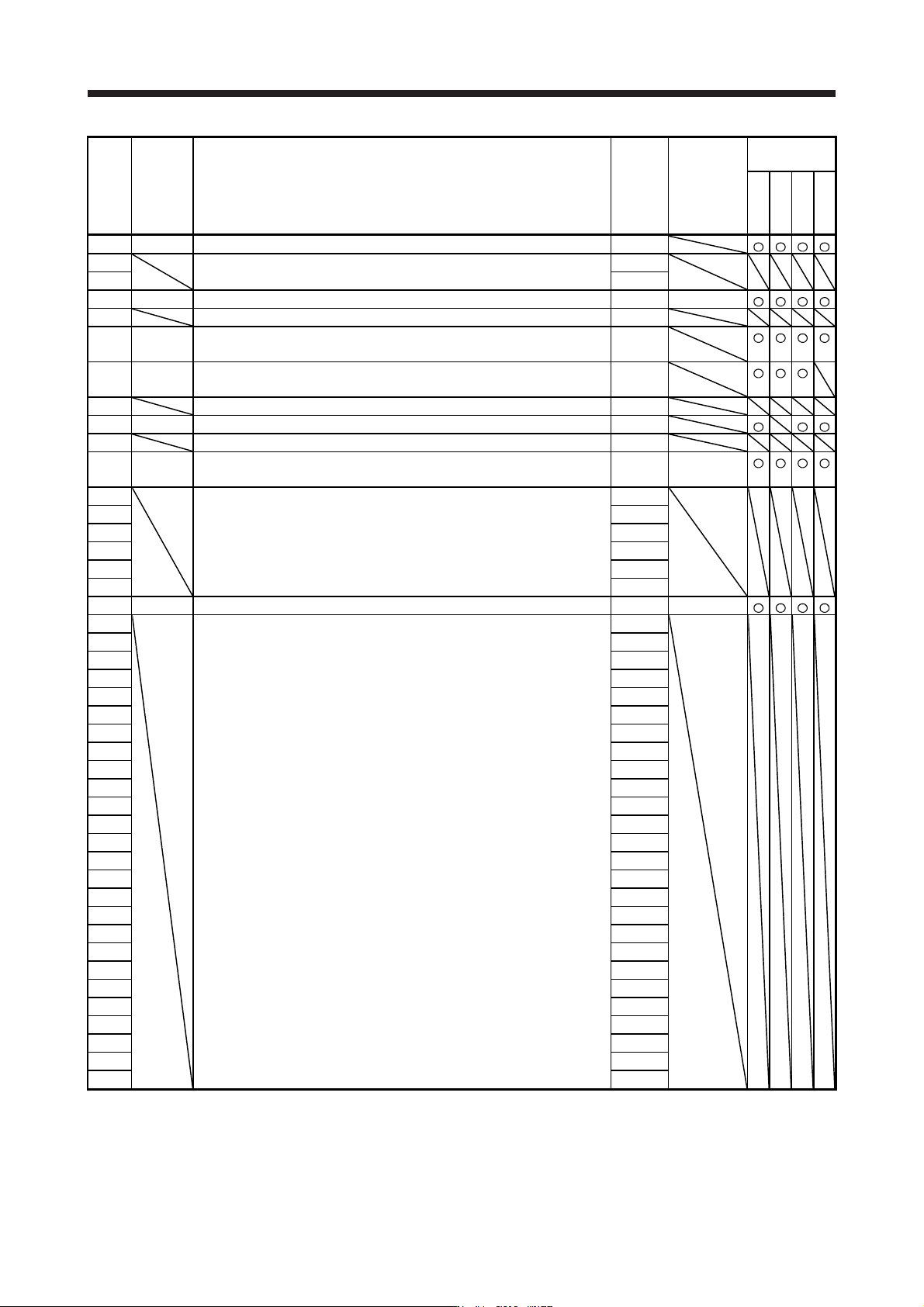
PC21 *BPS Alarm history clear 0000h
PC22 For manufacturer setting 0
PC23 0000h
PC24 RSBR Forced stop deceleration time constant 100 [ms]
PC25 For manufacturer setting 0
PC26 **COP8 Function selection C-8 0000h
(Note
)
PC27 **COP9 Function selection C-9 0000h
(Note
)
PC28 For manufacturer setting 0000h
PC29 *COPB Function selection C-B 0000h
PC30 For manufacturer setting 0
PC31 RSUP1 Vertical axis freefall prevention compensation amount 0 [0.0001 rev]/
[0.01 mm]
PC32 For manufacturer setting 0000h
PC33 0
PC34 100
PC35 0000h
PC36 0000h
PC37 0000h
PC38 ERW Error excessive warning level 0 [rev]/[mm]
PC39 For manufacturer setting 0000h
PC40 0000h
PC41 0000h
PC42 0000h
PC43 0000h
PC44 0000h
PC45 0000h
PC46 0000h
PC47 0000h
PC48 0000h
PC49 0000h
PC50 0000h
PC51 0000h
PC52 0000h
PC53 0000h
PC54 0000h
PC55 0000h
PC56 0000h
PC57 0000h
PC58 0000h
PC59 0000h
PC60 0000h
PC61 0000h
PC62 0000h
PC63 0000h
PC64 0000h
Note. It is available when the scale measurement function is enabled
(
[Pr. PA22] is "1 _ _ _" or "2 _ _ _"
)
.
5. PARAMETERS
5 - 6
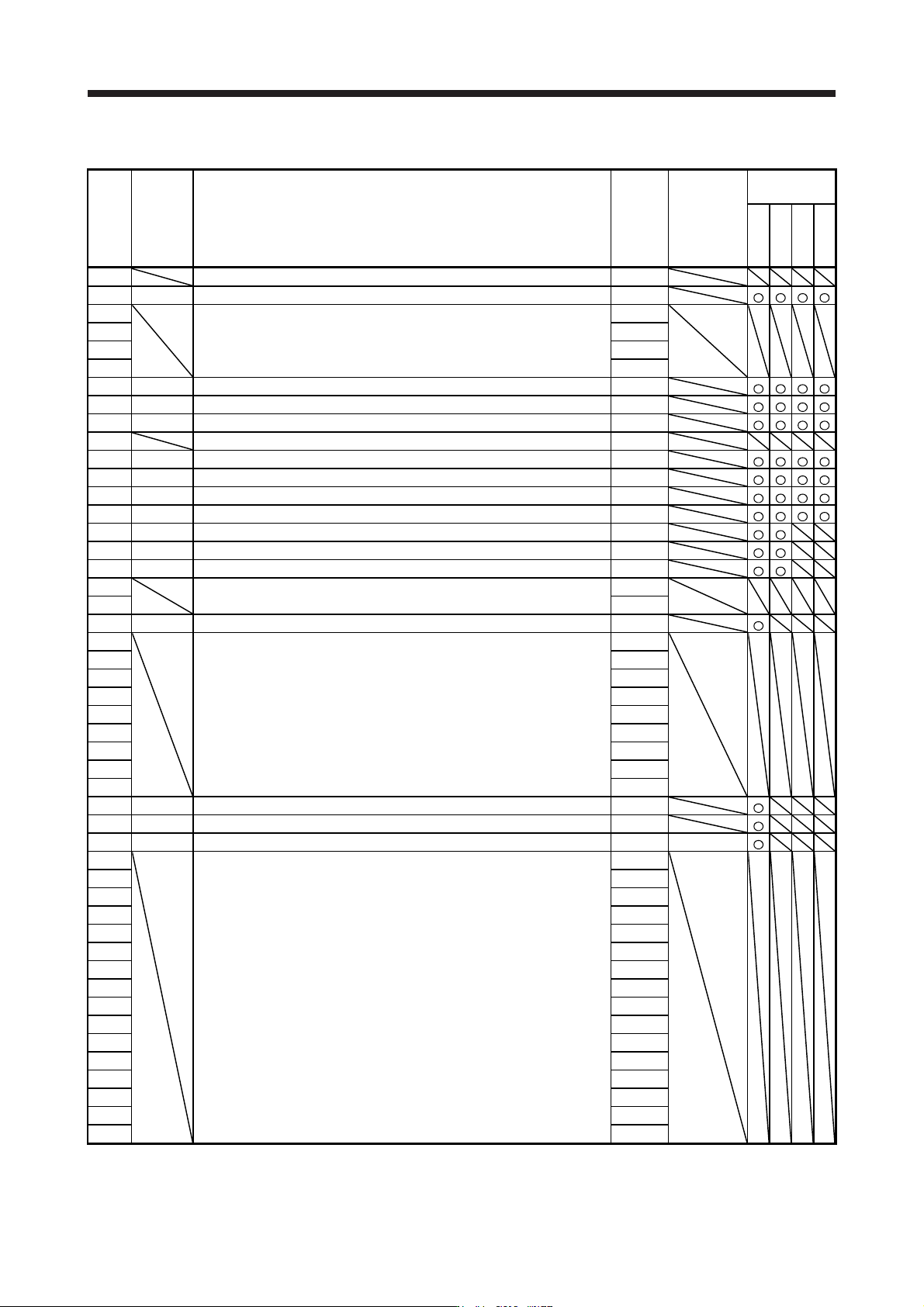
5.1.4 I/O setting parameters ([Pr. PD_ _ ])
No. Symbol Name
Initial
value
Unit
Operation
mode
Standard
Full.
Lin.
D.D.
PD01 For manufacturer setting 0000h
PD02 *DIA2 Input signal automatic on selection 2 0000h
PD03 For manufacturer setting 0020h
PD04 0021h
PD05 0022h
PD06 0000h
PD07 *DO1 Output device selection 1 0005h
PD08 *DO2 Output device selection 2 0004h
PD09 *DO3 Output device selection 3 0003h
PD10 For manufacturer setting 0000h
PD11 *DIF Input filter setting (Note) 0004h
PD12 *DOP1 Function selection D-1 0000h
PD13 *DOP2 Function selection D-2 0000h
PD14 *DOP3 Function selection D-3 0000h
PD15 *IDCS Driver communication setting 0000h
PD16 *MD1 Driver communication setting - Master - Transmit data selection 1 0000h
PD17 *MD2 Driver communication setting - Master - Transmit data selection 2 0000h
PD18 For manufacturer setting 0000h
PD19 0000h
PD20 *SLA1 Driver communication setting - Slave - Master axis No. selection 1 0
PD21 For manufacturer setting 0
PD22 0
PD23 0
PD24 0000h
PD25 0000h
PD26 0000h
PD27 0000h
PD28 0000h
PD29 0000h
PD30 TLC Master-slave operation - Torque command coefficient on slave 0
PD31 VLC Master-slave operation - Speed limit coefficient on slave 0
PD32 VLL Master-slave operation - Speed limit adjusted value on slave 0 [r/min]
PD33 For manufacturer setting 0000h
PD34 0000h
PD35 0000h
PD36 0000h
PD37 0000h
PD38 0000h
PD39 0000h
PD40 0000h
PD41 0000h
PD42 0000h
PD43 0000h
PD44 0000h
PD45 0000h
PD46 0000h
PD47 0000h
PD48 0000h
Note. Refer to the servo s
y
stem controller instruction manual for the settin
g
.
5. PARAMETERS
5 - 7
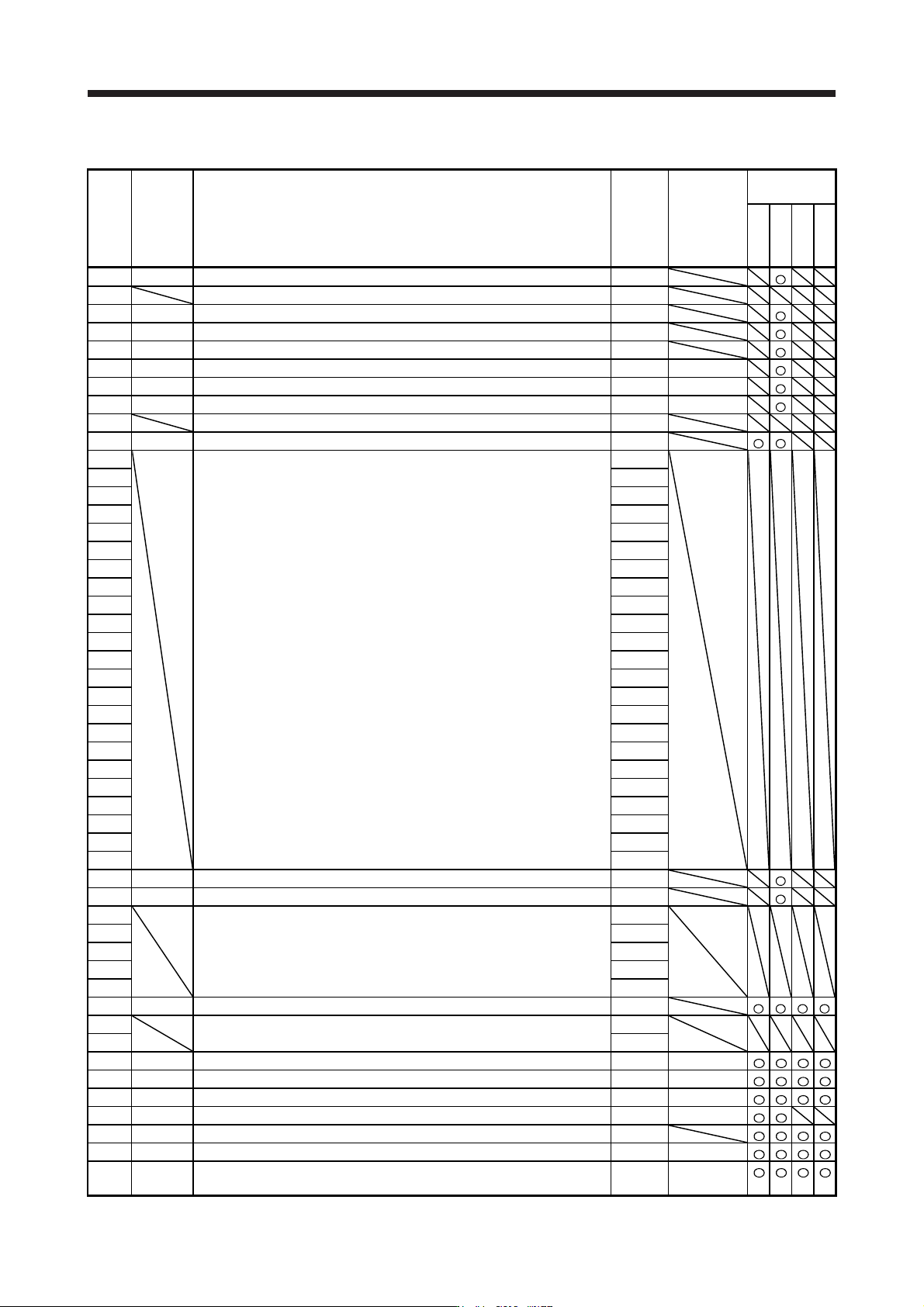
5.1.5 Extension setting 2 parameters ([Pr. PE_ _ ])
No. Symbol Name
Initial
value
Unit
Operation
mode
Standard
Full.
Lin.
D.D.
PE01 **FCT1 Fully closed loop function selection 1 0000h
PE02 For manufacturer setting 0000h
PE03 *FCT2 Fully closed loop function selection 2 0003h
PE04 **FBN Fully closed loop control - Feedback pulse electronic gear 1 - Numerator 1
PE05 **FBD Fully closed loop control - Feedback pulse electronic gear 1 - Denominator 1
PE06 BC1 Fully closed loop control - Speed deviation error detection level 400 [r/min]
PE07 BC2 Fully closed loop control - Position deviation error detection level 100 [kpulse]
PE08 DUF Fully closed loop dual feedback filter 10 [rad/s]
PE09 For manufacturer setting 0000h
PE10 FCT3 Fully closed loop function selection 3 0000h
PE11 For manufacturer setting 0000h
PE12 0000h
PE13 0000h
PE14 0111h
PE15 20
PE16 0000h
PE17 0000h
PE18 0000h
PE19 0000h
PE20 0000h
PE21 0000h
PE22 0000h
PE23 0000h
PE24 0000h
PE25 0000h
PE26 0000h
PE27 0000h
PE28 0000h
PE29 0000h
PE30 0000h
PE31 0000h
PE32 0000h
PE33 0000h
PE34 **FBN2 Fully closed loop control - Feedback pulse electronic gear 2 - Numerator 1
PE35 **FBD2 Fully closed loop control - Feedback pulse electronic gear 2 - Denominator 1
PE36 For manufacturer setting 0.0
PE37 0.00
PE38 0.00
PE39 20
PE40 0000h
PE41 EOP3 Function selection E-3 0000h
PE42 For manufacturer setting 0
PE43 0.0
PE44 LMCP Lost motion compensation positive-side compensation value selection 0 [0.01%]
PE45 LMCN Lost motion compensation negative-side compensation value selection 0 [0.01%]
PE46 LMFLT Lost motion filter setting 0 [0.1 ms]
PE47 TOF Torque offset 0 [0.01%]
PE48 *LMOP Lost motion compensation function selection 0000h
PE49 LMCD Lost motion compensation timing 0 [0.1 ms]
PE50 LMCT Lost motion compensation non-sensitive band 0
[pulse]/
[kpulse]