sh030106u.pdf - 第182页
5. PARAMETE RS 5 - 37 No. Sym bol Name and function Initial value [unit] Setting range PC08 OSL Overs peed alarm detection level This is us ed to set an overspeed alarm detecti on level. When you set a v alue more than &…
5. PARAMETERS
5 - 36
No. Symbol Name and function
Initial
value
[unit]
Setting
range
PC04 **COP1 Function selection C-1
Select the encoder cable communication method.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x For manufacturer setting 0h
_ _ x _ 0h
_ x _ _ 0h
x _ _ _ Encoder cable communication method selection
0: Two-wire type
1: Four-wire type
When using an encoder of A/B/Z-phase differential output method,
set "0".
Incorrect setting will result in [AL. 16 Encoder initial communication
error 1] or [AL. 20 Encoder normal communication error 1]. Setting
"1" will trigger [AL. 37] while "Fully closed loop control mode (_ _ 1
_)" is selected in [Pr. PA01] (except MR-J4-_B_-RJ).
If the settings of the servo amplifier are unchanged from the factory
settings and communication with the controller is performed for the
first time, this digit will be automatically set according to the
communication method of the connected encoder cable.
0h
PC05 **COP2 Function selection C-2
Set the motor-less operation and [AL. 9B Error excessive warning]. The motor-less operation
cannot be used in the fully closed loop control mode, linear servo motor control mode, or DD
motor control mode.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x Motor-less operation selection
0: Disabled
1: Enabled
0h
_ _ x _ For manufacturer setting 0h
_ x _ _ 0h
x _ _ _ [AL. 9B Error excessive warning] selection
0: [AL. 9B Error excessive warning] disabled
1: [AL. 9B Error excessive warning] enabled
The setting of this digit is used by servo amplifier with software
version B4 or later.
0h
PC06 *COP3 Function selection C-3
Select units for error excessive alarm level setting with [Pr. PC01] and for error excessive
warning level setting with [Pr. PC38]. The parameter is not available in the speed control
mode and torque control mode.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x For manufacturer setting 0h
_ _ x _ 0h
_ x _ _ 0h
x _ _ _ Error excessive alarm/error excessive warning level unit selection
0: Per 1 rev or 1 mm
1: Per 0.1 rev or 0.1 mm
2: Per 0.01 rev or 0.01 mm
3: Per 0.001 rev or 0.001 mm
0h
PC07 ZSP Zero speed
Used to set the output range of ZSP (Zero speed detection).
ZSP (Zero speed detection) has hysteresis of 20 r/min or 20 mm/s.
50
[r/min]/
[mm/s]
0
to
10000
5. PARAMETERS
5 - 37
No. Symbol Name and function
Initial
value
[unit]
Setting
range
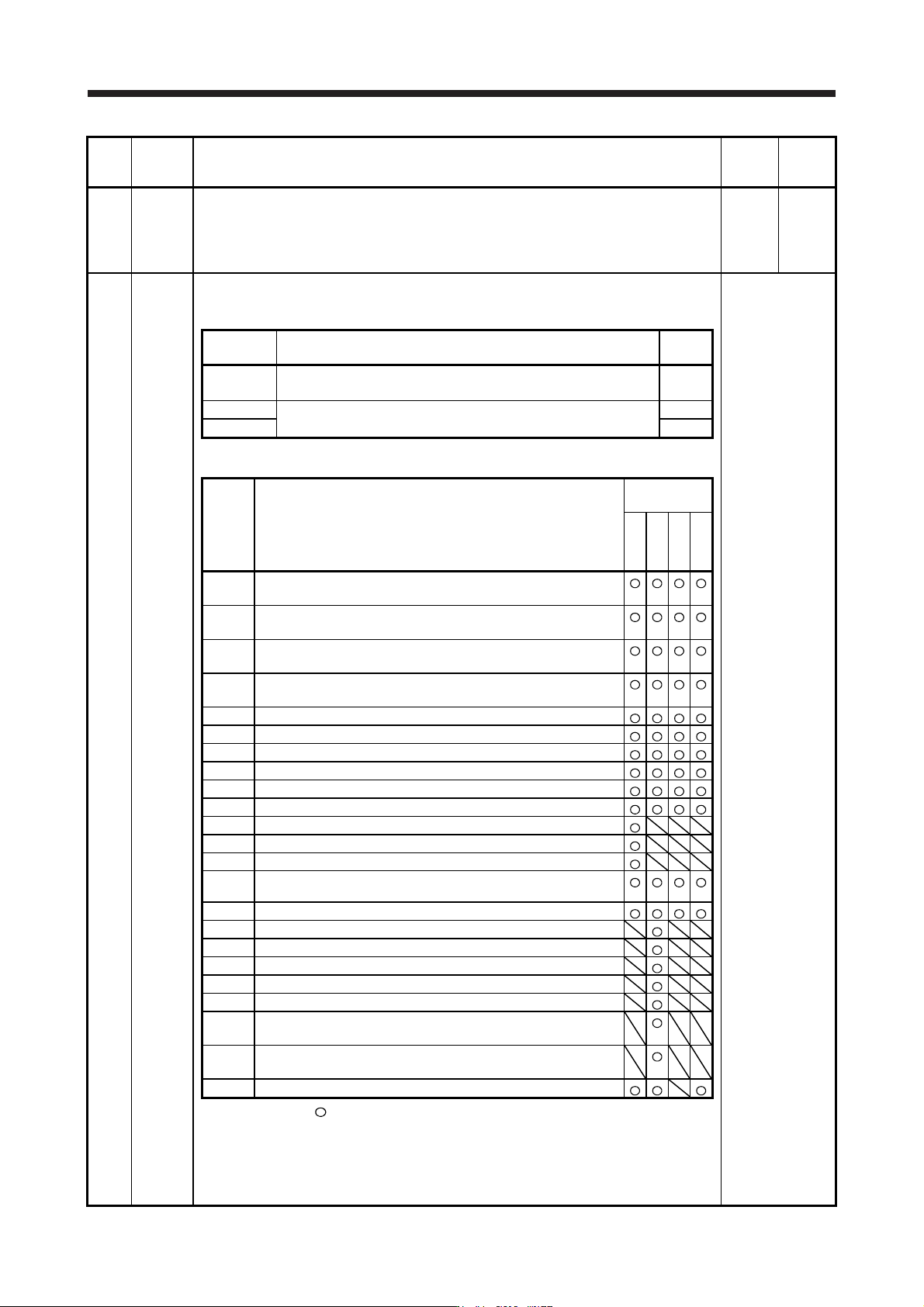
PC08 OSL Overspeed alarm detection level
This is used to set an overspeed alarm detection level.
When you set a value more than "servo motor maximum speed × 120%" or "linear servo
motor maximum speed × 120%", the set value will be clamped.
When you set "0", the value of "(linear) servo motor maximum speed × 120%" will be set.
0
[r/min]/
[mm/s]
0
to
20000
PC09 MOD1 Analog monitor 1 output
Select a signal to output to MO1 (Analog monitor 1). Refer to app. 11.3 for detection point of
output selection.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ x x Analog monitor 1 output selection
Refer to table 5.7 for settings.
00h
_ x _ _ For manufacturer setting 0h
x _ _ _ 0h
Table 5.7 Analog monitor setting value
Setting
value
Item
Operation
mode (Note 1)
Standard
Full.
Lin.
D.D.
_ _ 0 0
(Linear) servo motor speed
(±8 V/max. speed)
_ _ 0 1
Torque or thrust
(±8 V/max. torque or max. thrust)
_ _ 0 2
(Linear) servo motor speed
(+8 V/max. speed)
_ _ 0 3
Torque or thrust
(+8 V/max. torque or max. thrust)
_ _ 0 4 Current command (±8 V/max. current command)
_ _ 0 5 Speed command (±8 V/max. speed)
_ _ 0 6 Servo motor-side droop pulses (±10 V/100 pulses) (Note 2)
_ _ 0 7 Servo motor-side droop pulses (±10 V/1000 pulses) (Note 2)
_ _ 0 8 Servo motor-side droop pulses (±10 V/10000 pulses) (Note 2)
_ _ 0 9 Servo motor-side droop pulses (±10 V/100000 pulses) (Note 2)
_ _ 0 A Feedback position (±10 V/1 Mpulse) (Note 2)
_ _ 0 B Feedback position (±10 V/10 Mpulses) (Note 2)
_ _ 0 C Feedback position (±10 V/100 Mpulses) (Note 2)
_ _ 0 D
Bus voltage (200 V class and 100 V class: +8 V/400 V, 400 V
class: +8 V/800 V)
_ _ 0 E Speed command 2 (±8 V/max. speed)
_ _ 1 0 Load-side droop pulses (±10 V/100 pulses) (Note 2)
_ _ 1 1 Load-side droop pulses (±10 V/1000 pulses) (Note 2)
_ _ 1 2 Load-side droop pulses (±10 V/10000 pulses) (Note 2)
_ _ 1 3 Load-side droop pulses (±10 V/100000 pulses) (Note 2)
_ _ 1 4 Load-side droop pulses (±10 V/1 Mpulse) (Note 2)
_ _ 1 5
Servo motor-side/load-side position deviation
(±10 V/100000 pulses)
_ _ 1 6
Servo motor-side/load-side speed deviation
(±8 V/max. speed)
_ _ 1 7 Internal temperature of encoder (±10 V/±128 ˚C)
Note 1. Items with
are available for each operation mode.
Standard: Semi closed loop system use of the rotary servo motor
Full.: Fully closed loop system use of the rotary servo motor
Lin.: Linear servo motor use
D.D.: Direct drive motor use
2. Encoder pulse unit
5. PARAMETERS
5 - 38
No. Symbol Name and function
Initial
value
[unit]
Setting
range
PC10 MOD2 Analog monitor 2 output
Select a signal to output to MO2 (Analog monitor 2). Refer to app. 11.3 for detection point of
output selection.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ x x
Analog monitor 2 output selection
Refer to [Pr. PC09] for settings.
01h
_ x _ _ For manufacturer setting 0h
x _ _ _ 0h
PC11 MO1 Analog monitor 1 offset
This is used to set the offset voltage of MO1 (Analog monitor 1).
0
[mV]
-999 to
999
PC12 MO2 Analog monitor 2 offset
This is used to set the offset voltage of MO2 (Analog monitor 2).
0
[mV]
-999 to
999
PC13 MOSDL Analog monitor - Feedback position output standard data - Low
Set a monitor output standard position (lower 4 digits) for the feedback position for when
selecting "Feedback position" for MO1 (Analog monitor 1) and MO2 (Analog monitor 2).
Monitor output standard position = [Pr. PC14] setting × 10000 + [Pr. PC13] setting
0
[pulse]
-9999 to
9999
PC14 MOSDH Analog monitor - Feedback position output standard data - High
Set a monitor output standard position (higher 4 digits) for the feedback position for when
selecting "Feedback position" for MO1 (Analog monitor 1) and MO2 (Analog monitor 2).
Monitor output standard position = [Pr. PC14] setting × 10000 + [Pr. PC13] setting
0
[10000
pulses]
-9999 to
9999
PC17 **COP4 Function selection C-4
This is used to select a home position setting condition.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x
Selection of home position setting condition
When using an incremental type linear encoder, set "0". Setting "1"
triggers [AL. 37 Parameter error].
0: Need to pass servo motor Z-phase after power on
1: Not need to pass servo motor Z-phase after power on
0h
_ _ x _ Linear encoder multipoint Z-phase input function selection
When two or more reference marks exist in the fully stroke, set "1".
0: Disabled
1: Enabled
This parameter is used by servo amplifier with software version A5
or later.
0h
_ x _ _ For manufacturer setting 0h
x _ _ _ 0h
PC18 *COP5 Function selection C-5
This is used to select an occurring condition of [AL. E9 Main circuit off warning].
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x For manufacturer setting 0h
_ _ x _ 0h
_ x _ _ 0h
x _ _ _
[AL. E9 Main circuit off warning] selection
0: Detection with ready-on and servo-on command
1: Detection with servo-on command
0h