sh030106u.pdf - 第196页
5. PARAMETE RS 5 - 51 5.2.6 Exte nsion s etting 3 p arameters ([Pr. PF _ _ ]) No. Sym bol Name and function Initial value [unit] Setting range PF06 *FOP5 Funct ion selection F-5 Refer to t he "Name and function"…
5. PARAMETERS
5 - 50
No. Symbol Name and function
Initial
value
[unit]
Setting
range
PE46 LMFLT Lost motion filter setting
Set the time constant of the lost motion compensation filter in increments of 0.1 ms.
If the time constant is "0", the torque is compensated with the value set in [Pr. PE44] and [Pr.
PE45]. If the time constant is other than "0", the torque is compensated with the high-pass
filter output value of the set time constant, and the lost motion compensation will continue.
This parameter is supported with software version B4 or later.
0
[0.1 ms]
0
to
30000
PE47 TOF Torque offset
Set this when canceling unbalanced torque of vertical axis. Set this assuming the rated torque
of the servo motor as 100%.
The torque offset does not need to be set for a machine not generating unbalanced torque.
The torque offset cannot be used for linear servo motors and direct drive motors. Set 0.00%.
The torque offset set with this parameter will be enabled in the position control mode, speed
control mode, and torque control mode. Input commands assuming torque offset for the
torque control mode.
This parameter is supported with software version B4 or later.
0
[0.01%]
-10000
to
10000
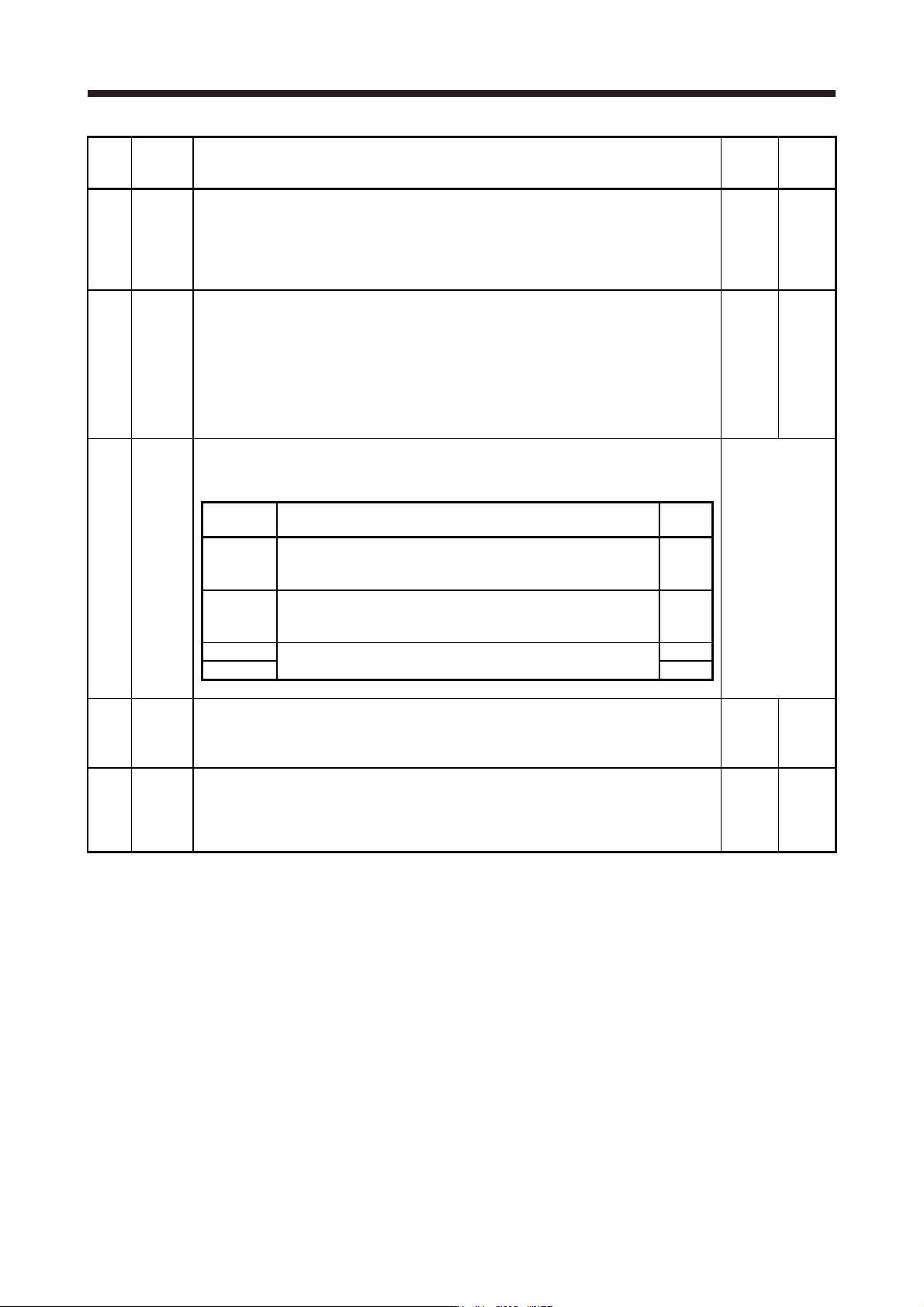
PE48 *LMOP Lost motion compensation function selection
Select the lost motion compensation function.
This parameter is supported with software version B4 or later.
Refer to the
"Name and
function" column.
Setting
value
Explanation
Initial
value
_ _ _ x Lost motion compensation selection
0: Disabled
1: Enabled
0h
_ _ x _ Unit setting of lost motion compensation non-sensitive band
0: 1 pulse unit
1: 1 kpulse unit
0h
_ x _ _ For manufacturer setting 0h
x _ _ _ 0h
PE49 LMCD Lost motion compensation timing
Set the lost motion compensation timing in increments of 0.1 ms.
You can delay the timing to perform the lost motion compensation for the set time.
This parameter is supported with software version B4 or later.
0
[0.1 ms]
0
to
30000
PE50 LMCT Lost motion compensation non-sensitive band
Set the lost motion compensation non-sensitive band. When the fluctuation of the droop pulse
is the setting value or less, the speed will be 0. Setting can be changed in [Pr. PE48]. Set the
parameter per encoder unit.
This parameter is supported with software version B4 or later.
0
[pulse]/
[kpulse]
0
to
65535
5. PARAMETERS
5 - 51
5.2.6 Extension setting 3 parameters ([Pr. PF_ _ ])
No. Symbol Name and function
Initial
value
[unit]
Setting
range
PF06 *FOP5 Function selection F-5
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x Electronic dynamic brake selection
0: Automatic (enabled only for specified servo motors)
2: Disabled
Refer to the following table for the specified servo motors.
0h
Series Servo motor
HG-KR HG-KR053/HG-KR13/HG-KR23/HG-KR43
HG-MR HG-MR053/HG-MR13/HG-MR23/HG-MR43
HG-SR HG-SR51/HG-SR52
_ _ x _ For manufacturer setting 0h
_ x _ _ 0h
x _ _ _ 0h
PF12 DBT Electronic dynamic brake operating time
Set an operating time for the electronic dynamic brake.
2000
[ms]
0 to
10000
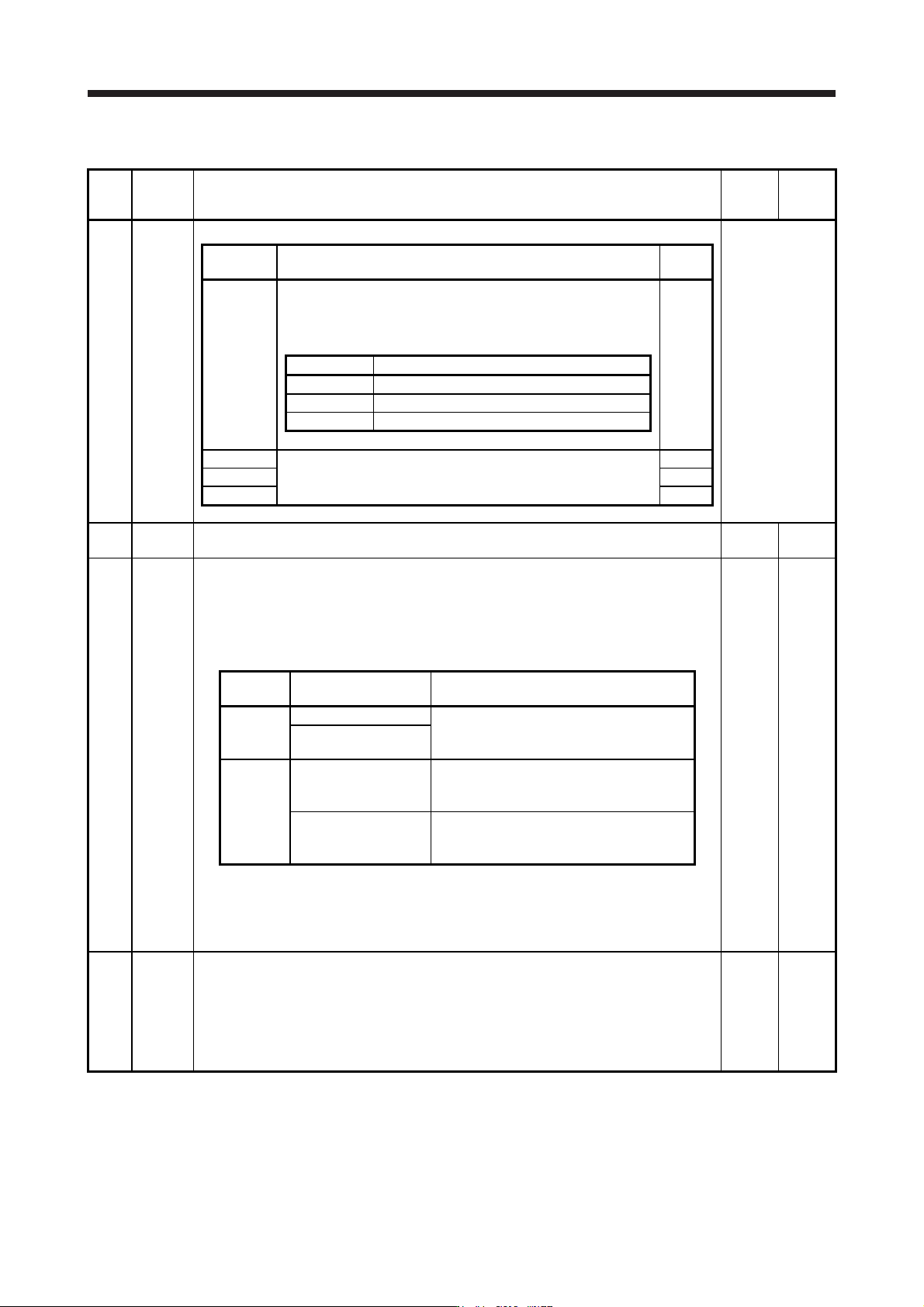
PF18 **STOD STO diagnosis error detection time
Set the time from when an error occurs in the STO input signal or STO circuit until the
detection of [AL. 68.1 Mismatched STO signal error].
When 0 s is set, the detection of [AL. 68.1 Mismatched STO signal error] is not performed.
The following shows safety levels at the time of parameter setting.
0
[s]
0
to
60
Setting
value
STO input diagnosis by
TOFB output
Safety level
0
Execute EN ISO 13849-1:2015 Category 3 PL d,
IEC 61508 SIL 2,
EN IEC 62061 maximum SIL 2
Not execute
1 to 60
Execute
EN ISO 13849-1:2015 Category 3 PL e,
IEC 61508 SIL 3,
EN IEC 62061 maximum SIL 3
Not execute
EN ISO 13849-1:2015 Category 3 PL d,
IEC 61508 SIL 2,
EN IEC 62061 maximum SIL 2
When the short-circuit connector is connected to the CN8 connector, set "0" in the parameter.
When MR-D30 functional safety unit is used, the parameter is not available.
For safety levels at the time of using MR-D30, refer to "MR-D30 Instruction Manual".
This parameter is available with servo amplifiers with software version C1 or later.
PF21 DRT Drive recorder switching time setting
This is used to set a drive recorder switching time.
When a USB communication is cut during using a graph function, the function will be changed
to the drive recorder function after the setting time of this parameter.
When a value from "1" to "32767" is set, it will switch after the setting value.
However, when "0" is set, it will switch after 600 s.
When "-1" is set, the drive recorder function is disabled.
0
[s]
-1 to
32767
5. PARAMETERS
5 - 52
No. Symbol Name and function
Initial
value
[unit]
Setting
range
PF23 OSCL1 Vibration tough drive - Oscillation detection level
This is used to set a filter readjustment sensitivity of [Pr. PB13 Machine resonance
suppression filter 1] and [Pr. PB15 Machine resonance suppression filter 2] while the vibration
tough drive is enabled.
However, setting "0" will be 50%.
Example: When you set "50" to the parameter, the filter will be readjusted at the time of 50%
or more oscillation level.
50
[%]
0 to 100
PF24 *OSCL2 Vibration tough drive function selection
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x Oscillation detection alarm selection
0: [AL. 54 Oscillation detection] will occur at oscillation detection.
1: [AL. F3.1 Oscillation detection warning] will occur at oscillation
detection.
2: Oscillation detection function disabled
Select alarm or warning when a oscillation continues at a filter
readjustment sensitivity level of [Pr. PF23].
The digit is continuously enabled regardless of the vibration tough
drive in [Pr. PA20].
0h
_ _ x _ For manufacturer setting 0h
_ x _ _ 0h
x _ _ _ 0h
PF25 CVAT SEMI-F47 function - Instantaneous power failure detection time
Set the time of the [AL. 10.1 Voltage drop in the control circuit power] occurrence.
This parameter setting range differs depending on the software version of the servo amplifier
as follows.
Software version C0 or later: Setting range 30 ms to 200 ms
Software version C1 or earlier: Setting range 30 ms to 500 ms
To comply with SEMI-F47 standard, it is unnecessary to change the initial value (200 ms).
When the instantaneous power failure time exceeds 200 ms, and if the instantaneous power
failure voltage is less than 70 % of the rated input voltage, the power may be turned off
normally even if a value larger than 200 ms is set in the parameter.
To disable the parameter, select "Disabled (_ 0 _ _)" of "SEMI-F47 function selection" in [Pr.
PA20].
200
[ms]
30 to
500
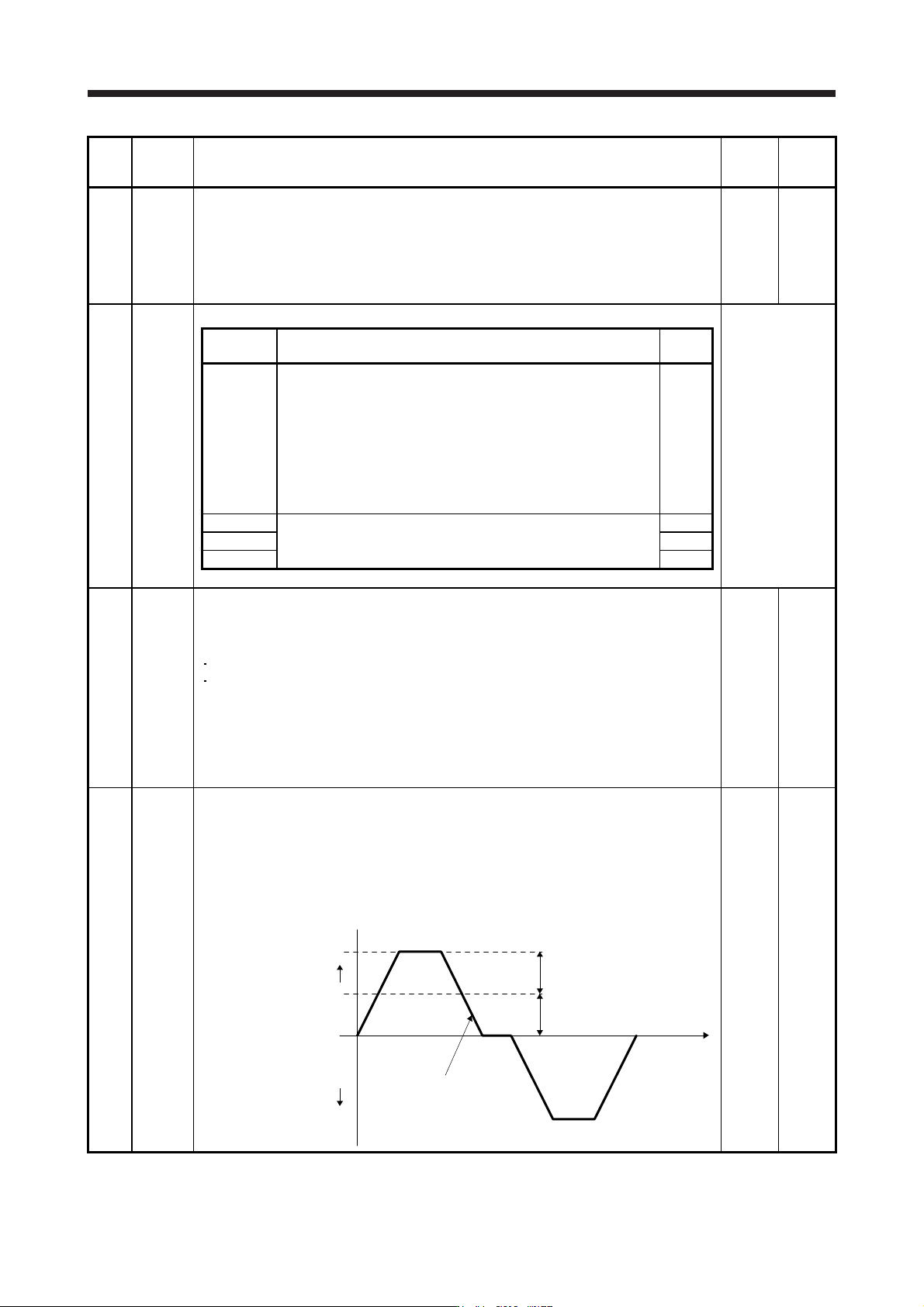
PF31 FRIC Machine diagnosis function - Friction judgment speed
Set a (linear) servo motor speed to divide a friction estimation area into high and low for the
friction estimation process of the machine diagnosis.
However, setting "0" will be the value half of the rated speed.
When your operation pattern is under rated speed, we recommend that you set half value to
the maximum speed with this.
Set a larger value than the one set in [Pr. PC07 Zero speed] in this parameter. If the speed is
the zero speed or less, the friction estimation process is not performed.
Maximum speed in operation
[Pr. PF31] setting
Operation pattern
0 r/min
Servo motor
speed
Forward rotation
direction
Reverse rotation
direction
(0 mm/s)
0
[r/min]/
[mm/s]
0 to
permiss
-ible
speed