sh030106u.pdf - 第266页
7. SPEC IAL ADJUSTMEN T FUNCT IONS 7 - 37 7.7 Super trace contr ol (1) Summary In the nor mal posi tion contr ol, droop pu lses ar e genera ted aga i nst th e position c ontrol c ommand fro m the contr oller. Usi ng the …
7. SPECIAL ADJUSTMENT FUNCTIONS
7 - 36
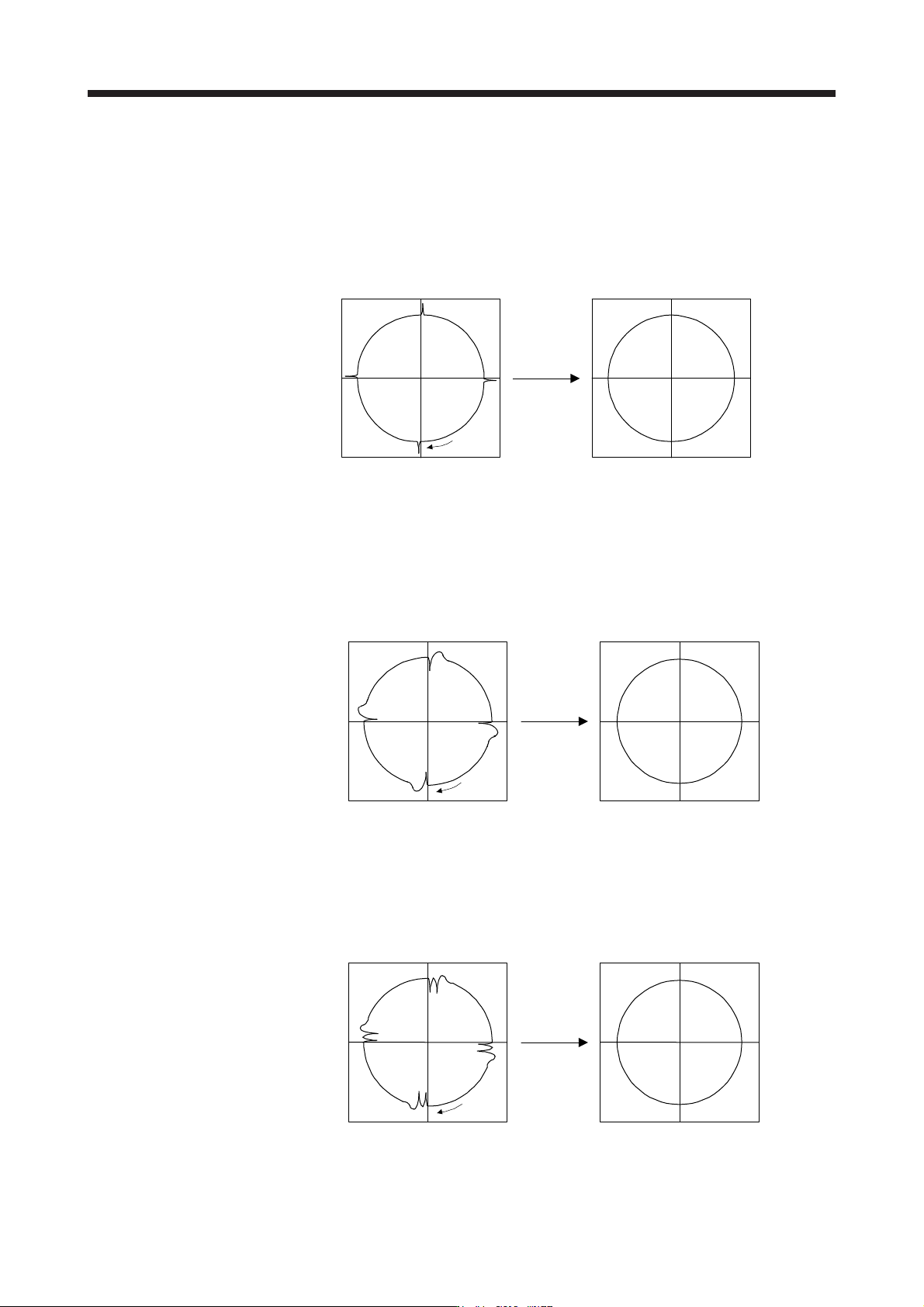
(d) Adjusting the lost motion compensation
When protrusions still occur, the compensation is insufficient. Increase the lost motion compensation
by approximately 0.5% until the protrusions are eliminated. When notches occur, the compensation
is excessive. Decrease the lost motion compensation by approximately 0.5% until the notches are
eliminated. Different values can be set as the compensation for each of when the forward rotation
(CCW) switches to the reverse rotation (CW) and when the reverse rotation (CW) switches to the
forward rotation (CCW).
The locus before compensation The locus after compensation
Compensation
Travel
direction
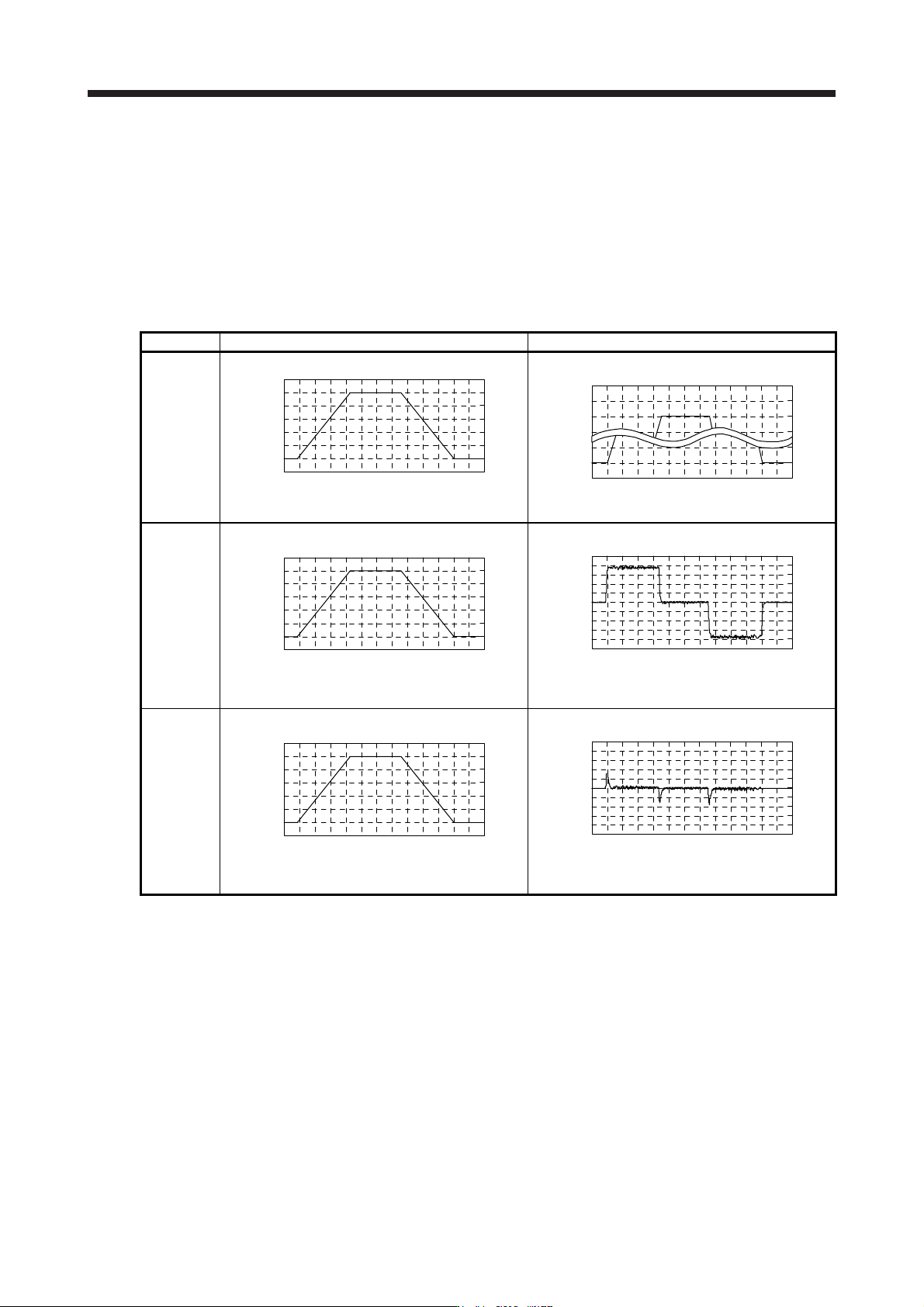
(e) Adjusting the lost motion compensation timing
When the machine has low rigidity, the speed loop gain is set lower than the standard setting value,
or the servo motor is rotating at high speed, quadrant projections may occur behind the quadrant
change points. In this case, you can suppress the quadrant projections by delaying the lost motion
compensation timing with [Pr. PE49 Lost motion compensation timing]. Increase the setting value of
[Pr. PE49] from 0 ms (Initial value) by approximately 0.5 ms to adjust the compensation timing.
Before timing delay compensation After timing delay compensation
Compensation
Travel
direction
(f) Adjusting the lost motion compensation non-sensitive band
When the lost motion is compensated twice around a quadrant change point, set [Pr. PE50 Lost
motion compensation non-sensitive band]. Increase the setting value so that the lost motion is not
compensated twice. Setting [Pr. PE50] may change the compensation timing. Adjust the lost motion
compensation timing of (2) (e) in this section.
Before timing delay compensation After timing delay compensation
Compensation
Travel
direction
7. SPECIAL ADJUSTMENT FUNCTIONS
7 - 37
7.7 Super trace control
(1) Summary
In the normal position control, droop pulses are generated against the position control command from
the controller. Using the feed forward gain sets droop pulses at a constant speed to almost 0. However,
droop pulses generated during acceleration/deceleration cannot be suppressed.
With the ideal model in the servo amplifier, the super trace control enables to set constant speed and
uniform acceleration/deceleration droop pulses to almost 0 that cannot be coped with by the feed
forward gain.
Control Position command (the same command) Droop pulses
Normal
control
Time
Servo motor speed
Time
Droop pulses
Droop pulses are always generated.
Feed
forward gain
Time
Servo motor speed
Time
Droop pulses
Droop pulses are generated during acceleration/
deceleration.
Super trace
control
Time
Servo motor speed
Time
Droop pulses
Droop pulses are almost 0 including the time of
acceleration or deceleration.
7. SPECIAL ADJUSTMENT FUNCTIONS
7 - 38
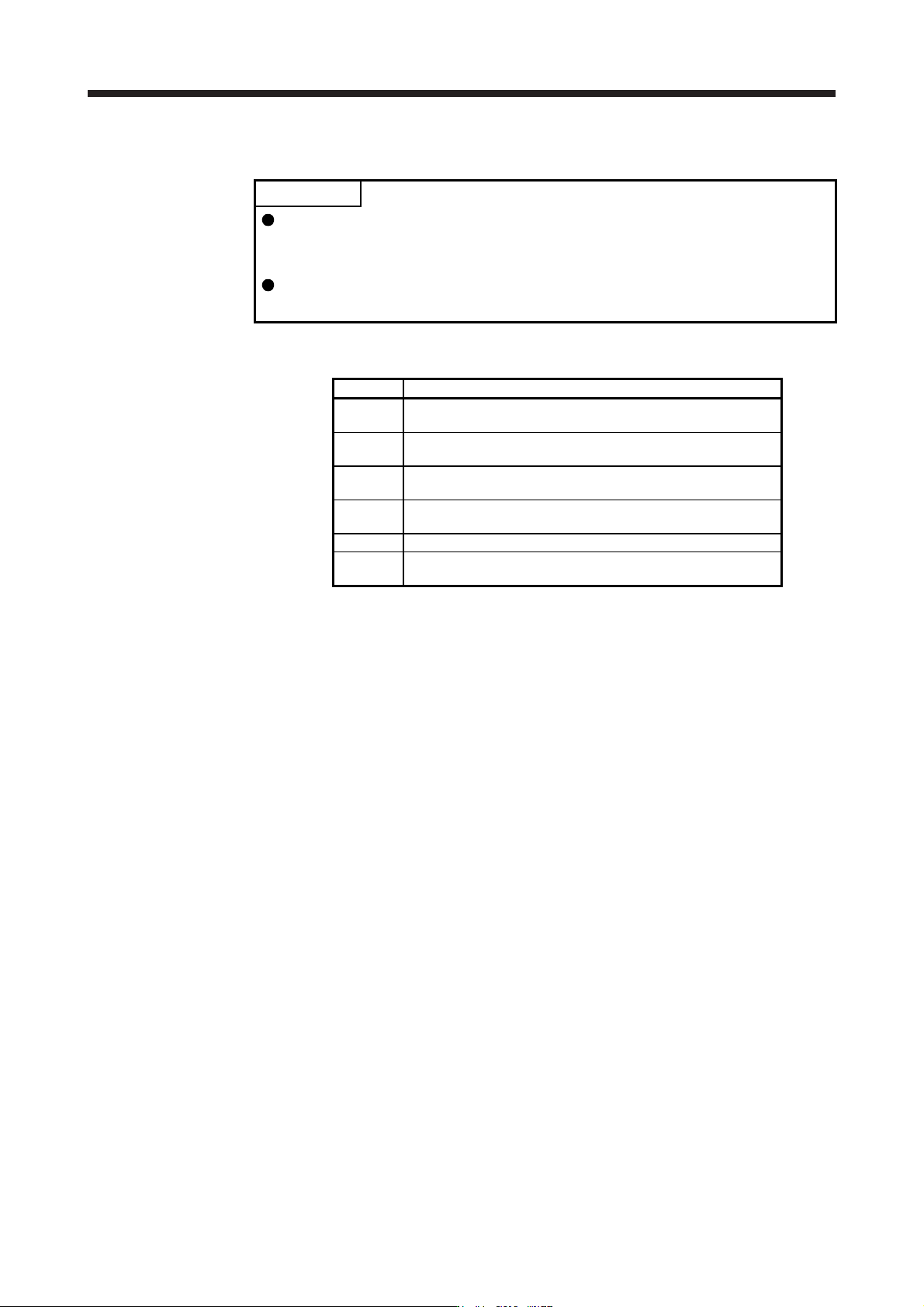
(2) Adjustment procedure
POINT
In the super trace control, droop pulses are near 0 during the servo motor
control. Thus, the normal INP (In-position) may always be turned on. Be sure to
set "INP (In-position) on condition selection" in [Pr. PD13] to " _ 1 _ _".
When you use the super trace control, it is recommended that the acceleration
time constant up to the rated speed be set to 1 s or more.
The following shows the adjustment procedure.
Step Operation
1
Execute the gain adjustment with one-touch tuning, auto tuning,
etc. Refer to chapter 6 for details.
2
Change the setting of auto tuning mode to the manual mode ([Pr.
PA08]: _ _ _ 3).
3
Change the setting of feed forward gain ([Pr. PB04]), and adjust
that droop pulses will be 0 at a constant speed.
4
Set the setting of INP (In-position) on condition selection ([Pr.
PD13]) to " _ 1 _ _".
5 Enable the super trace control. ([Pr. PA22]: _ _ 2 _)
6
Change the setting of model loop gain ([Pr. PB07]), and adjust
droop pulses during acceleration/deceleration.