sh030106u.pdf - 第305页
9. DIMENSIONS 9 - 22 MEMO
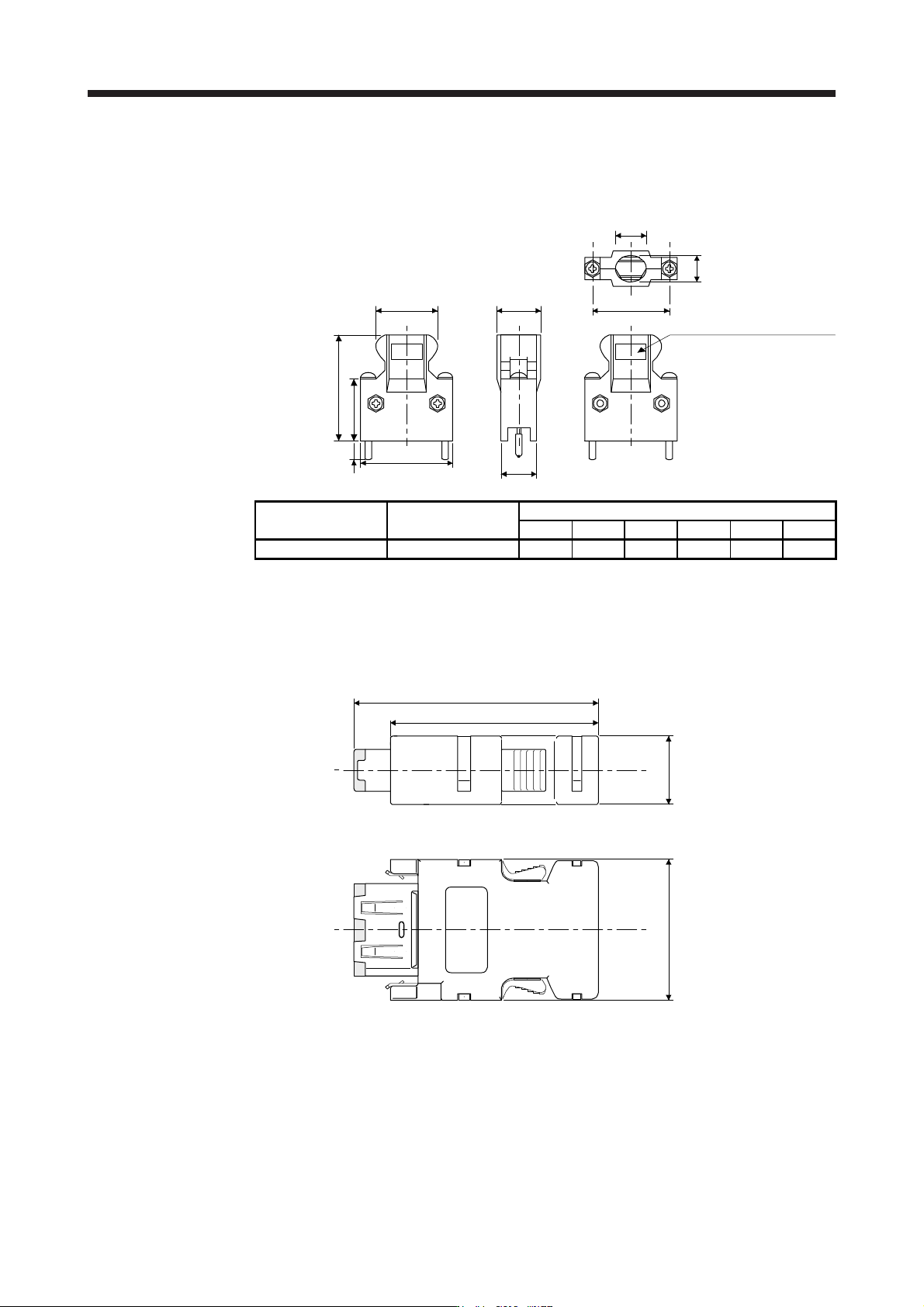
9. DIMENSIONS
9 - 21
(b) Jack screw M2.6 type
This is not available as option.
[Unit: mm]
E
B
A
23.8
39.0
12.7
C
D
5.2
F
Logo, etc., are indicated here.
Connector Shell kit
Each type of dimension
A B C D E F
10120-3000PE 10320-52F0-008 22.0 33.3 14.0 10.0 12.0 27.4
(3) SCR connector system (3M)
Receptacle: 36210-0100PL
Shell kit: 36310-3200-008
[Unit: mm]
34.8
39.5
22.4 11.0
9. DIMENSIONS
9 - 22
MEMO
10. CHARACTERISTICS
10 - 1
10. CHARACTERISTICS
POINT
For the characteristics of the linear servo motor and the direct drive motor, refer
to sections 14.4 and 15.4.
10.1 Overload protection characteristics
An electronic thermal is built in the servo amplifier to protect the servo motor, servo amplifier and servo
motor power wires from overloads.
[AL. 50 Overload 1] occurs if overload operation performed is above the electronic thermal protection curve
shown in fig. 10.1 [AL. 51 Overload 2] occurs if the maximum current is applied continuously for several
seconds due to machine collision, etc. Use the equipment on the left-hand side area of the continuous or
broken line in the graph.
For the system where the unbalanced torque occurs, such as a vertical axis system, the unbalanced torque
of the machine should be kept at 70% or less of the rated torque.
This servo amplifier has solid-state servo motor overload protection. (The servo motor overload current (full
load current) is set on the basis of 120% rated current of the servo amplifier.)