sh030106u.pdf - 第315页
10. CHA RACT ERISTI CS 10 - 10 (2) Dynamic brake t ime cons tant The foll owing sho ws neces sary dynamic br ake ti me cons tant τ for eq uation 10.2. (a) 200 V c lass 0 10 20 30 40 50 0 1000 2000 3000 4000 5000 6000 73 …
10. CHARACTERISTICS
10 - 9
10.3.1 Dynamic brake operation
(1) Calculation of coasting distance
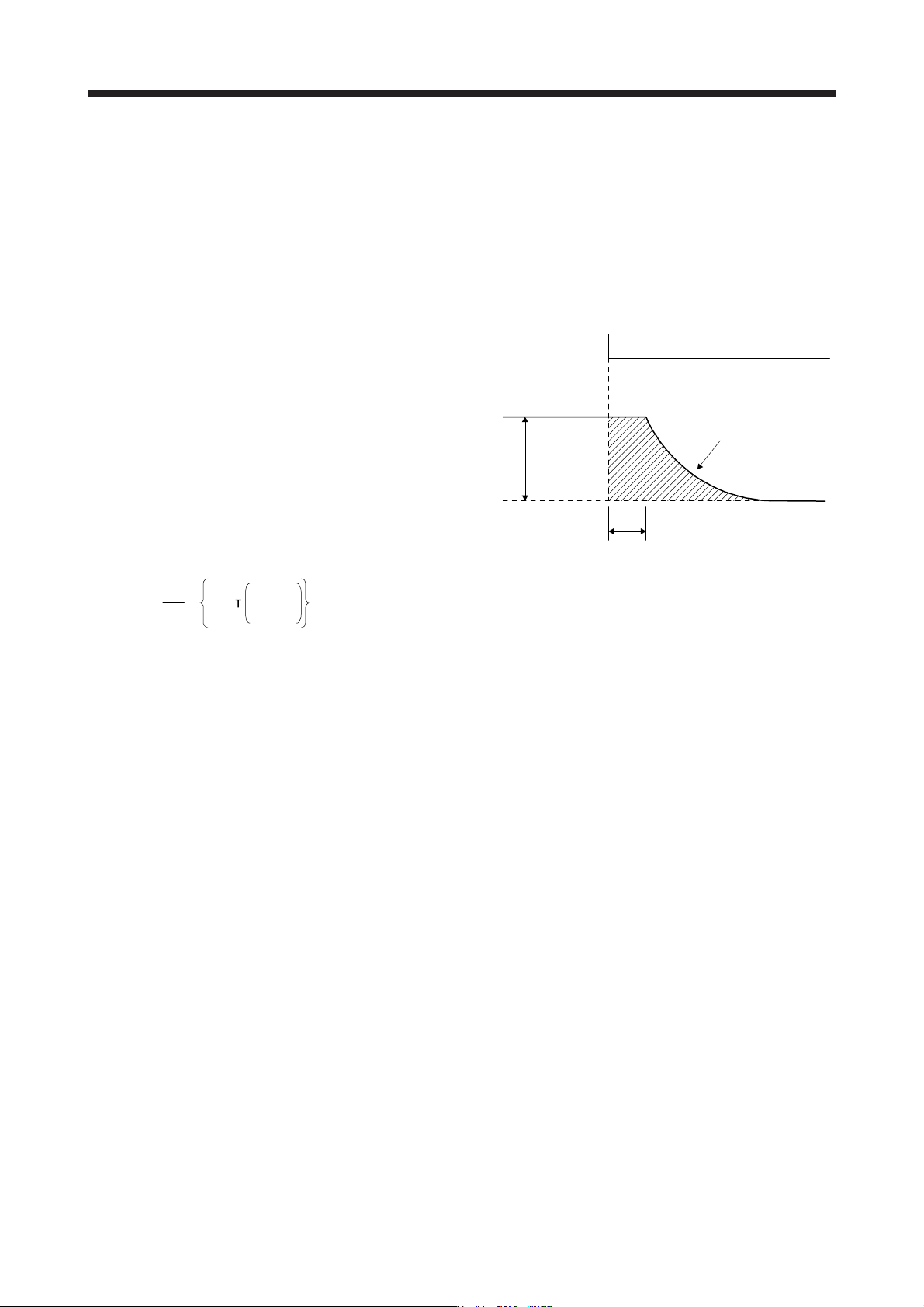
Fig. 10.3 shows the pattern in which the servo motor comes to a stop when the dynamic brake is
operated. Use equation 10.2 to calculate an approximate coasting distance to a stop. The dynamic brake
time constant τ varies with the servo motor and machine operation speeds. (Refer to (2) (a), (b) in this
section.)
A working part generally has a friction force. Therefore, actual coasting distance will be shorter than a
maximum coasting distance calculated with the following equation.
V
0
OFF
ON
Machine speed
t
e
Time
EM1 (Forced stop 1)
Dynamic brake
time constant τ
Fig. 10.3 Dynamic brake operation diagram
L
max
=
60
V
0
•
t
e
+
J
M
1 +
J
L
··························································································· (10.2)
L
max
: Maximum coasting distance ······················································································ [mm]
V
0
: Machine's fast feed speed ····················································································· [mm/min]
J
M
: Moment of inertia of the servo motor ··································································· [× 10
-4
kg•m
2
]
J
L
: Load moment of inertia converted into equivalent value on servo motor shaft ·············· [× 10
-4
kg•m
2
]
τ: Dynamic brake time constant ···························································································· [s]
t
e
: Delay time of control section ···························································································· [s]
For the servo amplifier of 7 kW or less, there is internal relay delay time of about 10 ms. For the servo
amplifier of 11 kW to 22 kW, there is delay caused by magnetic contactor built into the external
dynamic brake (about 50 ms) and delay caused by the external relay.
10. CHARACTERISTICS
10 - 10
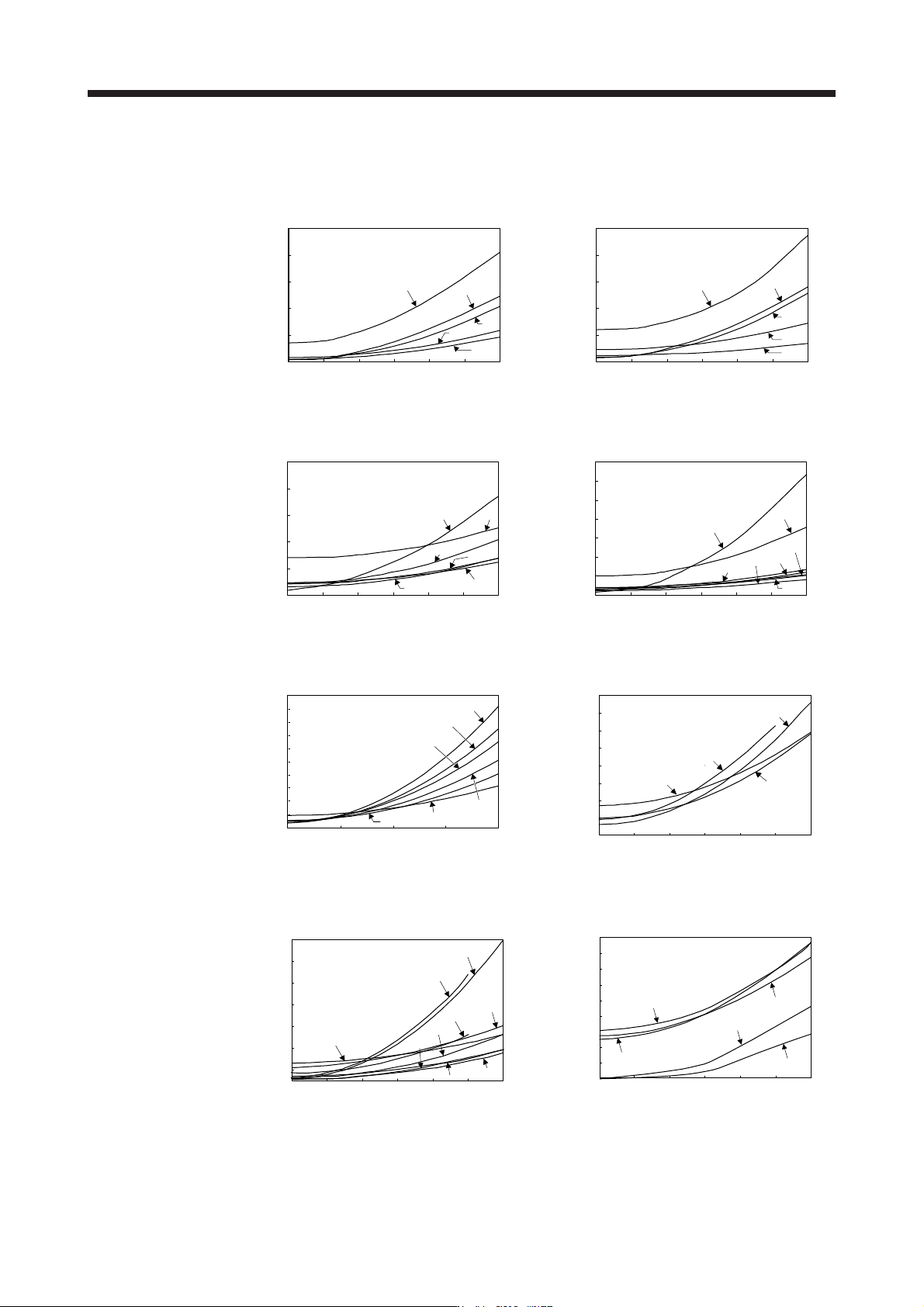
(2) Dynamic brake time constant
The following shows necessary dynamic brake time constant τ for equation 10.2.
(a) 200 V class
0
10
20
30
40
50
0 1000 2000 3000 4000 5000 6000
73
43
23
13
053
Speed [r/min]
Dynamic brake time
constant τ [ms]
Dynamic brake time
constant τ [ms]
0
10
20
30
40
50
0 1000 2000 3000 4000 5000 6000
73
43
23
13
053
Speed [r/min]
HG-MR series HG-KR series
121
0
20
40
60
80
100
0 250 500 750 1000 1250 1500
51 81
201
301
421
Dynamic brake time
constant τ [ms]
Speed [r/min]
0 500 1000 1500 2000 2500 3000
52
102
0
100
50
200
150
250
300
350
352
202
702
152
502
Dynamic brake time
constant τ [ms]
Speed [r/min]
HG-SR 1000 r/min series HG-SR 2000 r/min series
0
20
10
30
40
50
60
70
80
90
100
0 500 1000 1500 2000
15K1
25K1
20K1
801
60112K1
Speed [r/min]
Dynamic brake time
constant τ [ms]
Speed [r/min]
80
0
70
60
50
40
30
20
10
500 1000 1500 2000 2500 30000
15K1M
11K1M
22K1M
701M
Dynamic brake time
constant τ [ms]
HG-JR1000 r/min series HG-JR1500 r/min series
503
353
203
53
103
73
153
260
0
220
180
140
100
60
20
1000 2000 3000 4000 5000 60000
703
903
Servo motor speed [r/min]
Dynamic brake time
constant
τ
[ms]
0
2
4
6
8
10
12
14
16
18
0 500 1000 1500 2000 2500 3000
153
503103
353
203
Servo motor speed [r/min]
Dynamic brake time
constant
τ
[ms]
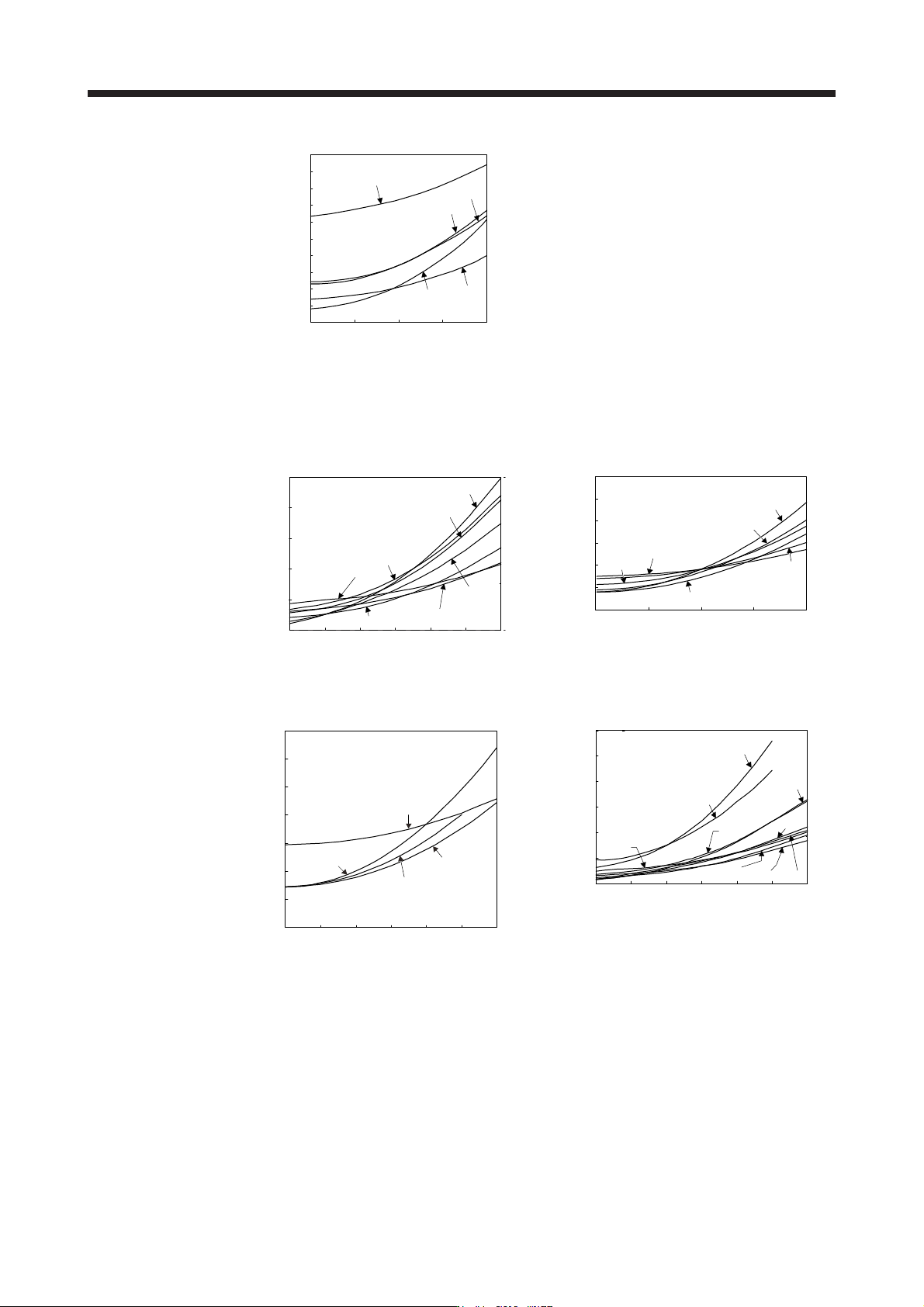
HG-JR3000 r/min series HG-RR series
10. CHARACTERISTICS
10 - 11
352
500 1000 1500 20000
0
10
20
30
40
50
60
70
80
90
100
502
72
202
152
Servo motor speed [r/min]
Dynamic brake time
constant τ [ms]
HG-UR series
(b) 400 V class
Speed [r/min]
0 500 1000
1500 2000 2500 3000
1524
5024
1024
524
100
80
60
40
20
0
2024
3524
7024
Dynamic brake time
constant
τ
[ms]
0
10
20
30
40
50
60
0 500 1000 1500 2000
6014
8014
25K14
12K14
20K14
15K14
Speed [r/min]
Dynamic brake time
constant τ [ms]
HG-SR series HG-JR1000 r/min series
Speed [r/min]
50
0
40
30
20
10
500 1000 1500 2000 2500 30000
11K1M4
22K1M4
15K1M4
701M4
70
60
Dynamic brake time
constant τ [ms]
Speed [r/min]
0 1000 2000
3000 4000 5000 6000
734
1534
5034
1034
534
120
100
80
60
40
20
0
2034
3534
9034
7034
Dynamic brake time
constant τ [ms]
HG-JR1500 r/min series HG-JR3000 r/min series