sh030106u.pdf - 第318页
10. CHA RACT ERISTI CS 10 - 13 10.4 Cab le bendin g life The bending life o f the cab les is shown below. This gr aph calc u lated values. S inc e they are no t guarant eed values, provide a litt le allow ance for these …
10. CHARACTERISTICS
10 - 12
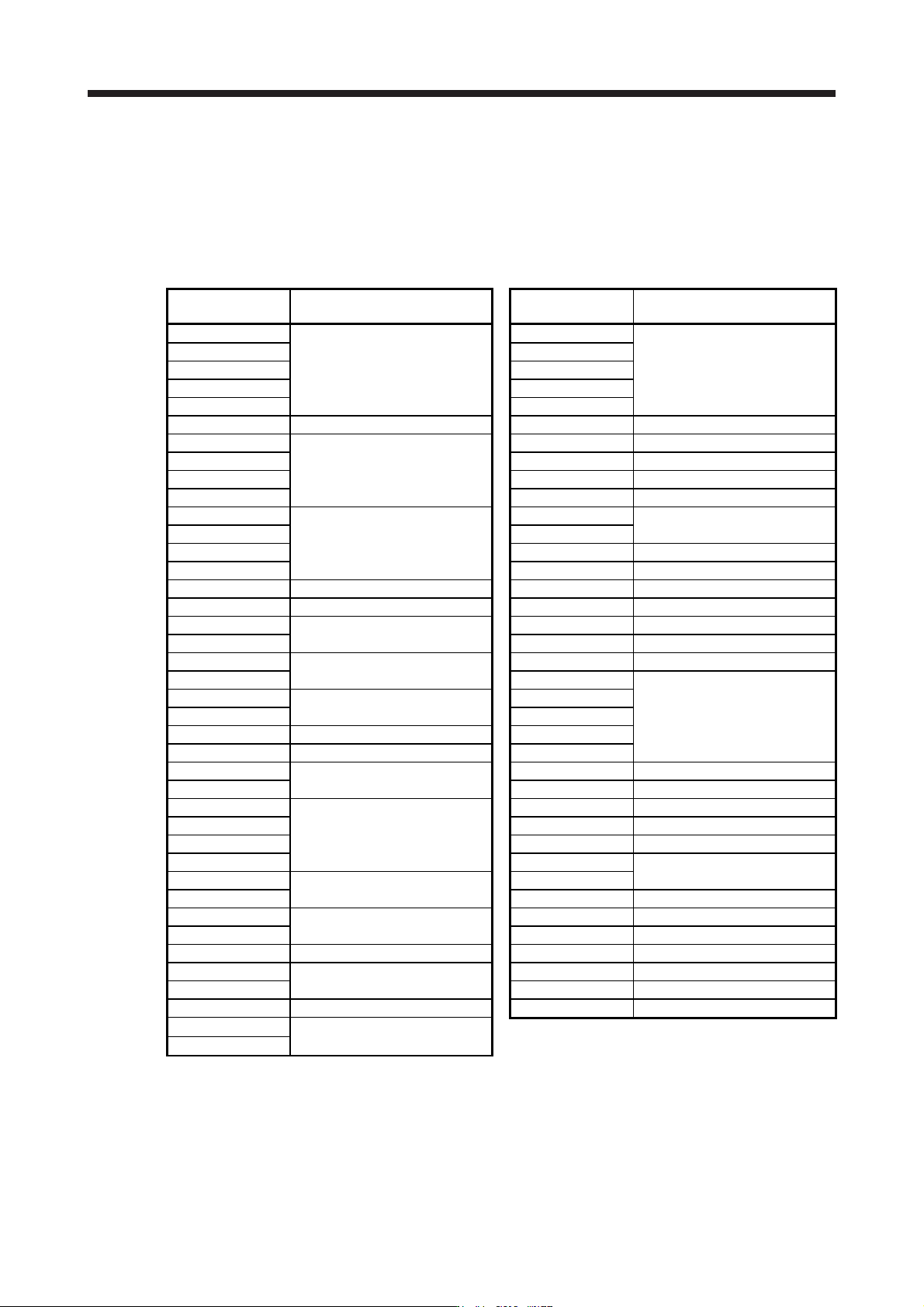
10.3.2 Permissible load to motor inertia when the dynamic brake is used
Use the dynamic brake under the load to motor inertia ratio indicated in the following table. If the load inertia
moment is higher than this value, the dynamic brake may burn. If the load to motor inertia ratio exceeds the
indicated value, contact your local sales office.
The values of the permissible load to motor inertia ratio in the table are the values at the maximum rotation
speed of the servo motor. The value in the parenthesis shows the value at the rated speed.
Servo motor
Permissible load to motor inertia
ratio [multiplier]
Servo motor
Permissible load to motor inertia
ratio [multiplier]
HG-KR053 HG-JR53
HG-KR13 HG-JR73
HG-KR23 30 HG-JR103 30
HG-KR43 HG-JR153
HG-KR73 HG-JR203
HG-MR053 35 HG-JR353 16 (30)
HG-MR13 HG-JR503 15 (30)
HG-MR23
32
HG-JR703 11 (30)
HG-MR43 HG-JR903 18 (30)
HG-MR73 HG-JR701M 5
HG-SR51
30
HG-JR11K1M
10 (30)
HG-SR81 HG-JR15K1M
HG-SR121 HG-JR22K1M 20 (30)
HG-SR201 HG-JR601 5
HG-SR301 16 HG-JR801 30
HG-SR421 15 HG-JR12K1 20 (30)
HG-SR52
30
HG-JR15K1 17 (30)
HG-SR102 HG-JR20K1 26 (30)
HG-SR152
21
HG-JR25K1 21 (30)
HG-SR202 HG-JR534
HG-SR352
13 (15)
HG-JR734
HG-SR502 HG-JR1034 30 (30)
HG-SR702 5 (15) HG-JR1534
HG-SR524 5 (15) HG-JR2034
HG-SR1024
5 (17)
HG-JR3534 20 (30) (Note)
HG-SR1524 HG-JR5034 15 (30)
HG-SR2024
5 (15)
HG-JR7034 11 (30)
HG-SR3524 HG-JR9034 18 (30)
HG-SR5024 HG-JR701M4 7 (10)
HG-SR7024 HG-JR11K1M4
10 (30)
HG-UR72
30
HG-JR15K1M4
HG-UR152 HG-JR22K1M4 20 (30)
HG-UR202
16
HG-JR6014 10
HG-UR352 HG-JR8014 30
HG-UR502 15 HG-JR12K14 20 (30)
HG-RR103
30
HG-JR15K14 30 (30)
HG-RR153 HG-JR20K14 26 (30)
HG-RR203 16 HG-JR25K14 21 (30)
HG-RR353
15
HG-RR503
Note. When the maximum torque is increased to 400%, the permissible load to motor inertia ratio at the maximum speed
of the servo motor is 25 times.
10. CHARACTERISTICS
10 - 13
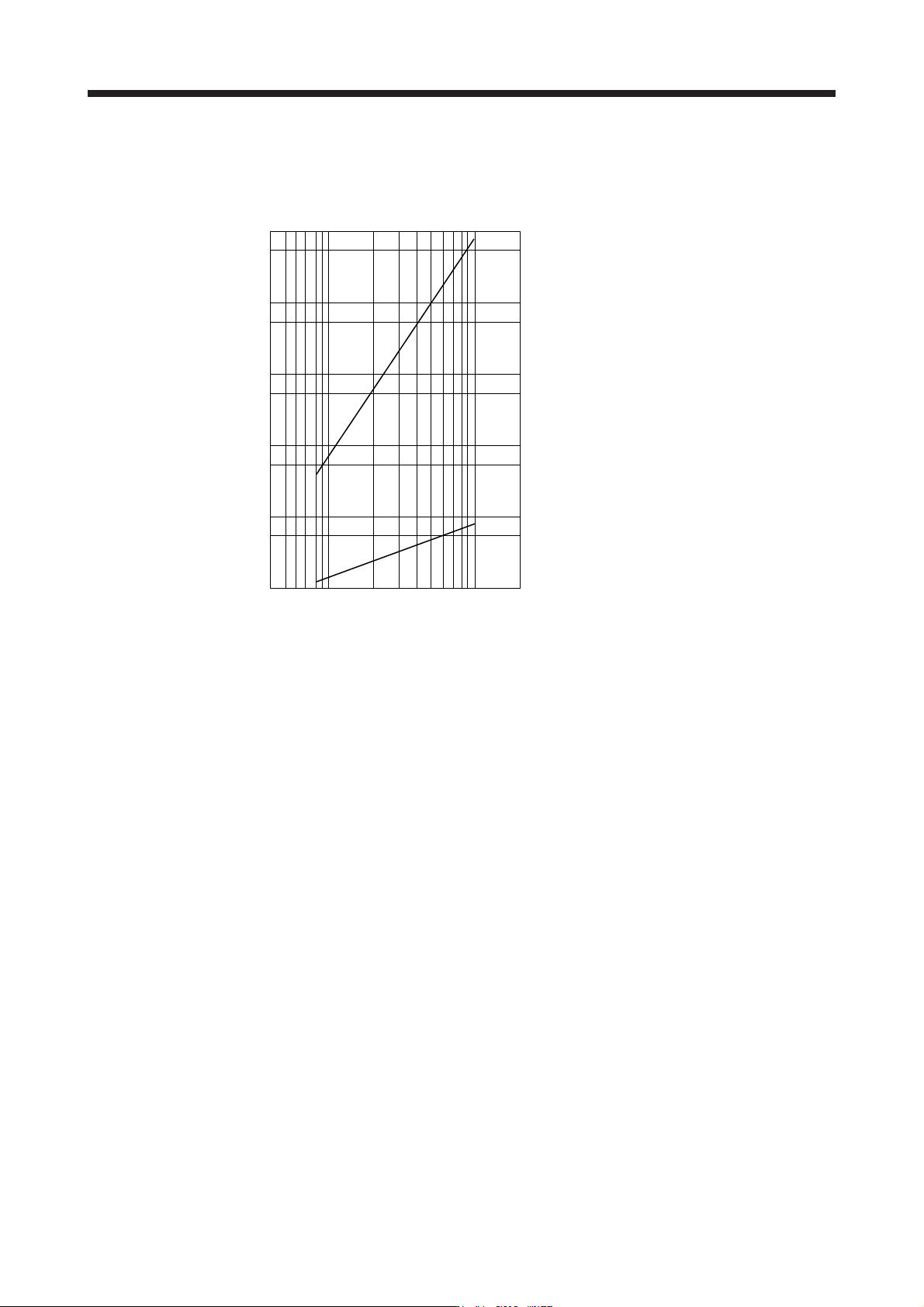
10.4 Cable bending life
The bending life of the cables is shown below. This graph calculated values. Since they are not guaranteed
values, provide a little allowance for these values.
a: Long bending life encoder cable
Long bending life motor power cable
Long bending life electromagnetic brake cable
SSCNET III cable using long distance cable
b: Standard encoder cable
Standard motor power cable
Standard electromagnetic brake cable
SSCNET III cable using inside panel standard cord
SSCNET III cable using outside panel standard cable
Number of bending times [time]
1 × 10
8
5 × 10
7
1 × 10
7
5 × 10
6
1 × 10
6
5 × 10
5
1 × 10
5
5 × 10
4
1 × 10
4
5 × 10
3
1 × 10
3
Bend radius [mm]
4 7 10 20 40 70 100 200
b
a
10. CHARACTERISTICS
10 - 14
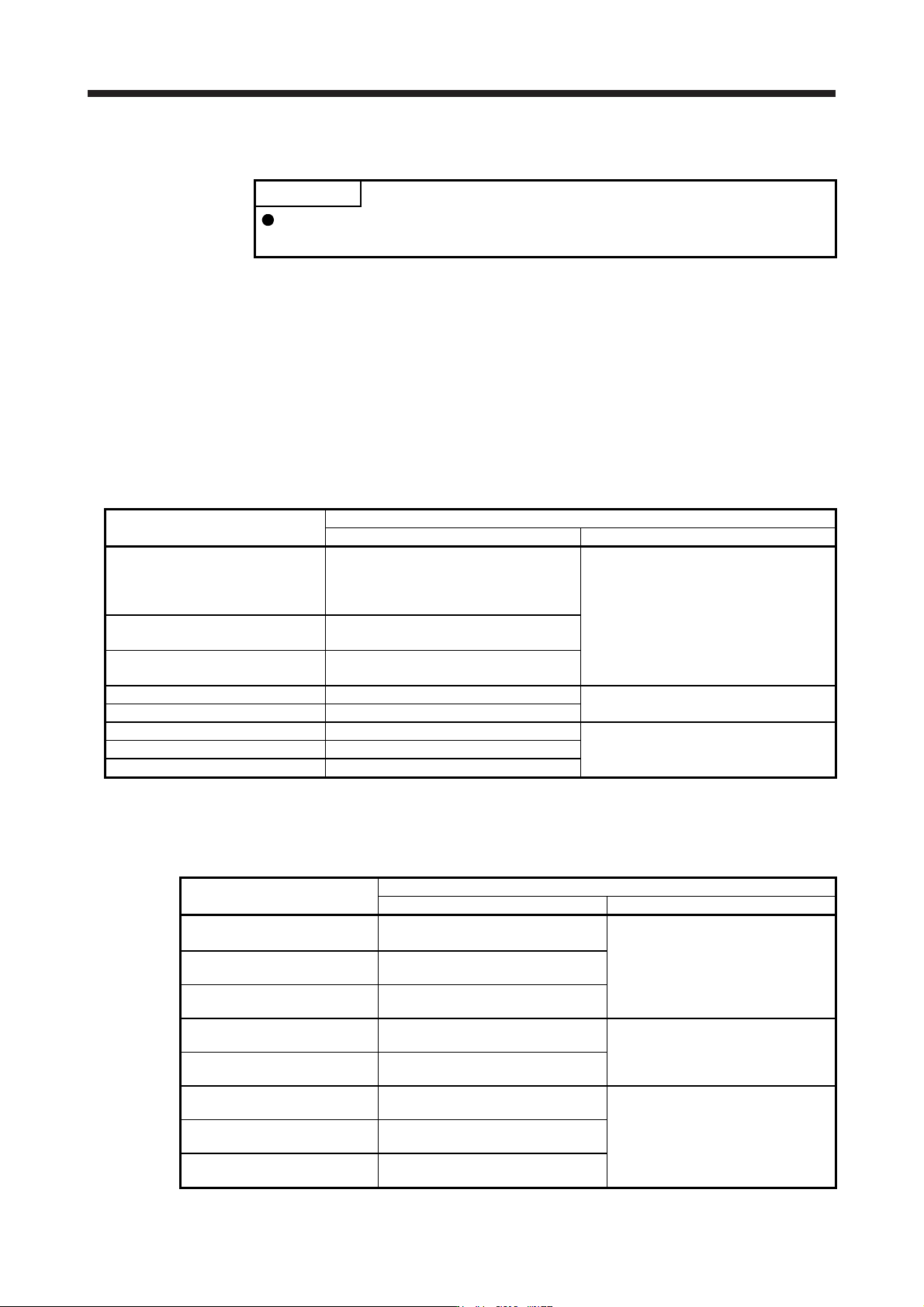
10.5 Inrush currents at power-on of main circuit and control circuit
POINT
For a servo amplifier of 600 W or less, the inrush current values can change
depending on frequency of turning on/off the power and ambient temperature.
A molded-case circuit breaker and magnetic contactor may fail or malfunction due to an inrush current
flowing through the servo amplifier's power lines (input lines) at power on. Therefore, use products with the
specifications as described. (Refer to section 11.10.)
When circuit protectors are used, it is recommended that the inertia delay type, which is not tripped by an
inrush current, be used.
(1) 200 V class
The following shows the inrush currents (reference data) that will flow when 240 V AC servo amplifier) is
applied at the power supply capacity. Even when you use a 1-phase 200 V AC power supply with MR-
J4-10B(-RJ) to MR-J4-200B(-RJ), the inrush currents of the main circuit power supply is the same.
Servo amplifier
Inrush currents (A
0-P
)
Main circuit power supply (L1/L2/L3) Control circuit power supply (L11/L21)
MR-J4-10B(-RJ)
MR-J4-20B(-RJ)
MR-J4-40B(-RJ)
MR-J4-60B(-RJ)
30 A (attenuated to approx. 3 A in 20 ms)
20 A to 30 A
(attenuated to approx. 1 A in 20 ms)
MR-J4-70B(-RJ)
MR-J4-100B(-RJ)
34 A (attenuated to approx. 7 A in 20 ms)
MR-J4-200B(-RJ)
MR-J4-350B(-RJ)
113 A (attenuated to approx. 12 A in 20 ms)
MR-J4-500B(-RJ) 42 A (attenuated to approx. 20 A in 20 ms)
34 A
(attenuated to approx. 2 A in 20 ms)
MR-J4-700B(-RJ) 85 A (attenuated to approx. 20 A in 30 ms)
MR-J4-11KB(-RJ) 226 A (attenuated to approx. 30 A in 30 ms)
42 A
(attenuated to approx. 2 A in 30 ms)
MR-J4-15KB(-RJ) 226 A (attenuated to approx. 50 A in 30 ms)
MR-J4-22KB(-RJ) 226 A (attenuated to approx. 70 A in 30 ms)
(2) 400 V class
The following shows the inrush currents (reference data) that will flow when 480 V AC is applied at the
power supply capacity.
Servo amplifier
Inrush currents (A
0-P
)
Main circuit power supply (L1/L2/L3) Control circuit power supply (L11/L21)
MR-J4-60B4(-RJ)
MR-J4-100B4(-RJ)
65 A
(attenuated to approx. 5 A in 10 ms)
40 A to 50 A
(attenuated to approx. 0 A in 2 ms)
MR-J4-200B4(-RJ)
80 A
(attenuated to approx. 5 A in 10 ms)
MR-J4-350B4(-RJ)
100 A
(attenuated to approx. 20 A in 10 ms)
MR-J4-500B4(-RJ)
65 A
(attenuated to approx. 9 A in 20 ms)
41 A
(attenuated to approx. 0 A in 3 ms)
MR-J4-700B4(-RJ)
68 A
(attenuated to approx. 34 A in 20 ms)
MR-J4-11KB4(-RJ)
339 A
(attenuated to approx. 10 A in 30 ms)
38 A
(attenuated to approx. 1 A in 30 ms)
MR-J4-15KB4(-RJ)
339 A
(attenuated to approx. 15 A in 30 ms)
MR-J4-22KB4(-RJ)
339 A
(attenuated to approx. 20 A in 30 ms)