sh030106u.pdf - 第38页
1. FUNCTI ONS AND CONF IGURATION 1 - 21 1.5 Func tion lis t The foll owing tabl e lists the functions of th is serv o. For deta ils of th e func tions, ref er to eac h sectio n of the detailed d escripti on fie ld. Funct…
1. FUNCTIONS AND CONFIGURATION
1 - 20
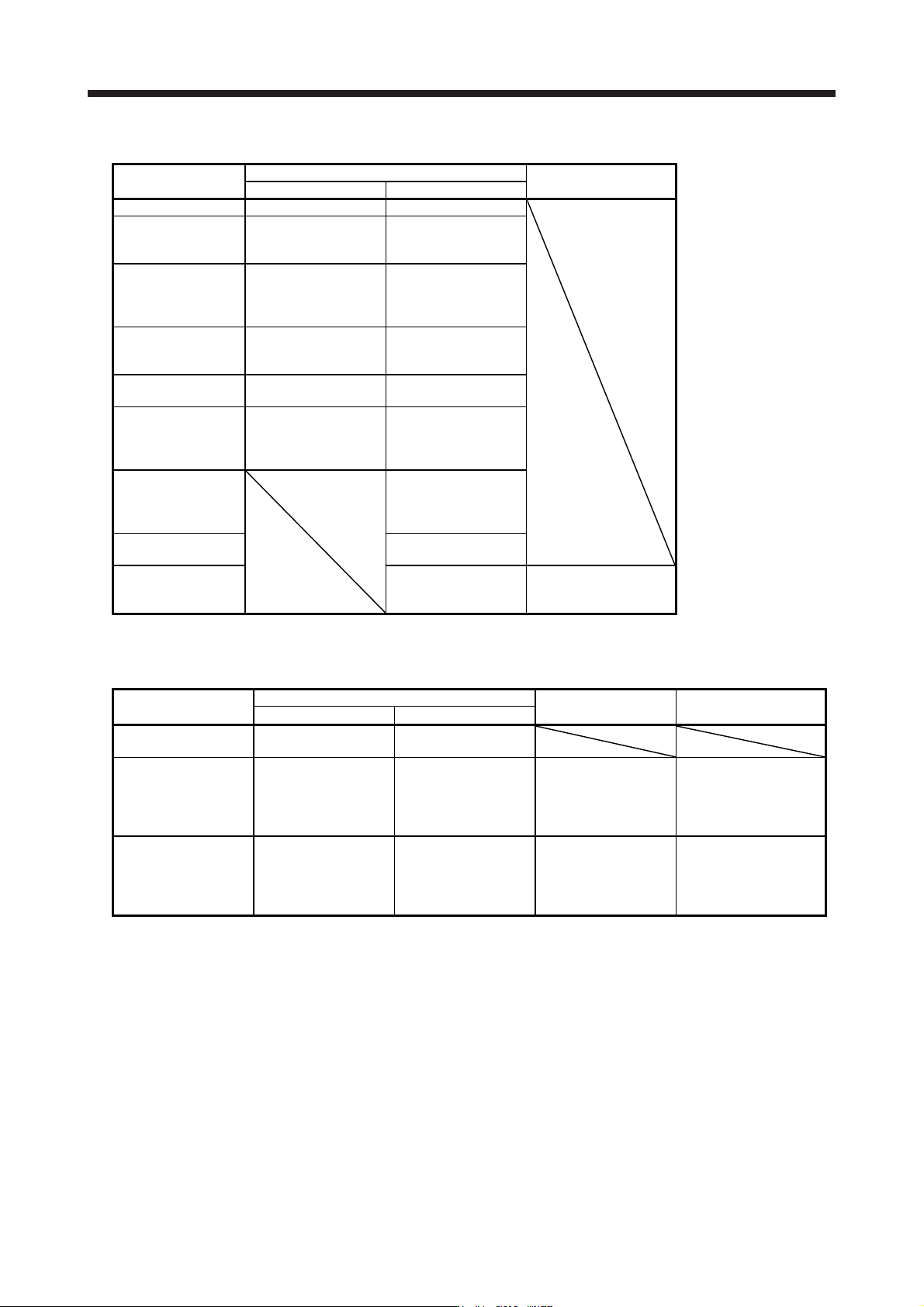
(2) 400 V class
Servo amplifier
Rotary servo motor
Linear servo motor
(primary side)
HG-SR HG-JR
MR-J4-60B4(-RJ) 524 534
MR-J4-100B4(-RJ)
1024
534 (Note)
734
1034
MR-J4-200B4(-RJ)
1524
2024
734 (Note)
1034 (Note)
1534
2034
MR-J4-350B4(-RJ)
3524
1534 (Note)
2034 (Note)
3534
MR-J4-500B4(-RJ)
5024
3534 (Note)
5034
MR-J4-700B4(-RJ)
7024
5034 (Note)
6014
701M4
7034
MR-J4-11KB4(-RJ)
8014
12K14
11K1M4
9034
MR-J4-15KB4(-RJ) 15K14
15K1M4
MR-J4-22KB4(-RJ) 20K14
25K14
22K1M4
LM-FP5H-60M-1SS0
Note. This combination is for increasin
g
the maximum torque of the servo motor to 400%.
(3) 100 V class
Servo amplifier
Rotary servo motor
Linear servo motor
(primary side)
Direct drive motor
HG-KR HG-MR
MR-J4-10B1(-RJ) 053
13
053
13
MR-J4-20B1(-RJ)
23 23
LM-U2PAB-05M-0SS0
LM-U2PBB-07M-1SS0
TM-RFM002C20
TM-RG2M002C30 (Note 1)
TM-RU2M002C30 (Note 1)
TM-RG2M004E30 (Note 1)
TM-RU2M004E30 (Note 1)
MR-J4-40B1(-RJ)
43 43
LM-H3P2A-07P-BSS0
LM-H3P3A-12P-CSS0
LM-K2P1A-01M-2SS1
LM-U2PAD-10M-0SS0
LM-U2PAF-15M-0SS0
TM-RFM004C20
TM-RG2M004E30 (Note 1, 2)
TM-RU2M004E30 (Note 1, 2)
TM-RG2M009G30 (Note 1)
TM-RU2M009G30 (Note 1)
Note 1. This is available with servo amplifiers with software version C8 or later.
2. This combination increases the rated torque and the maximum torque.
1. FUNCTIONS AND CONFIGURATION
1 - 21
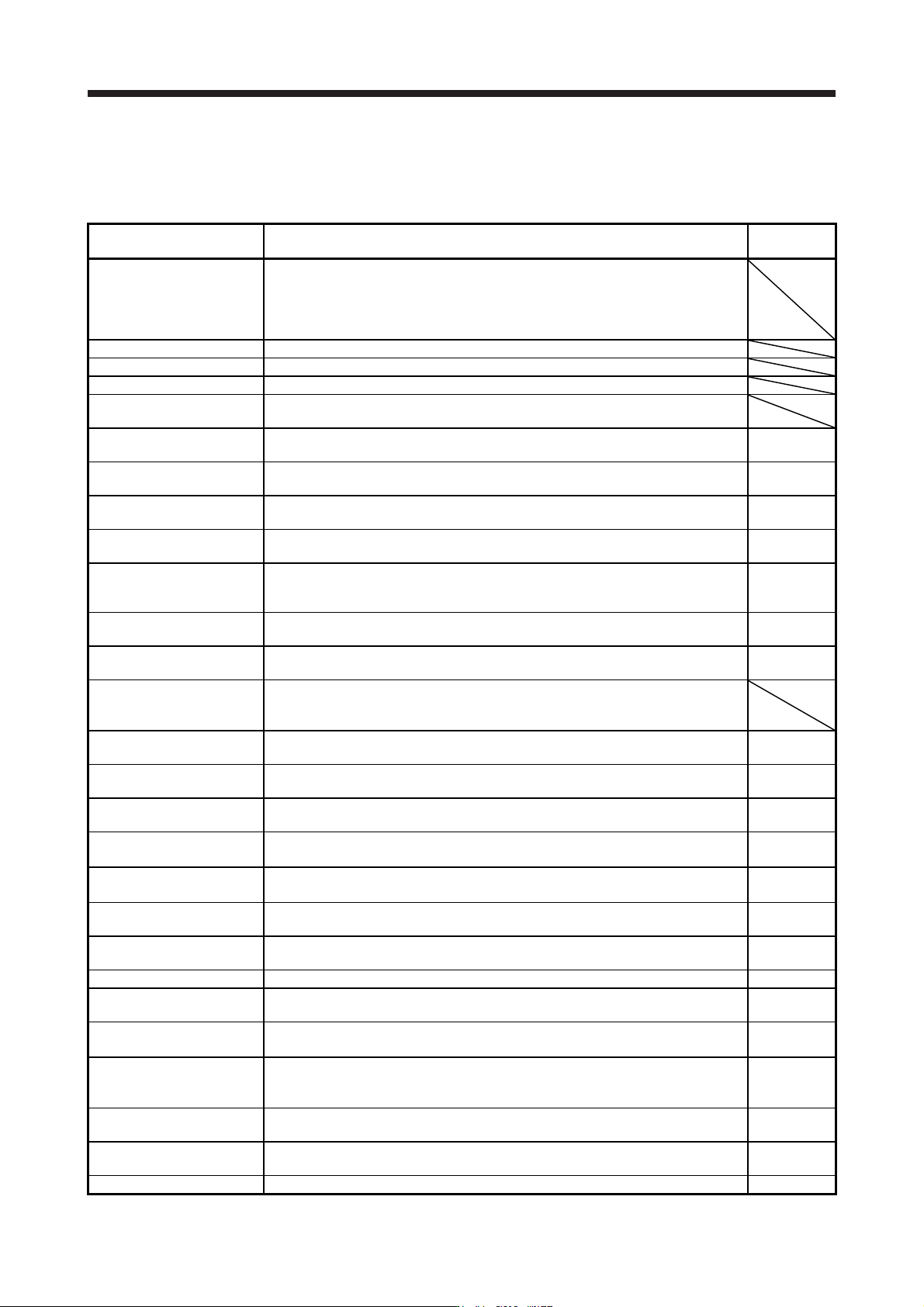
1.5 Function list
The following table lists the functions of this servo. For details of the functions, refer to each section of the
detailed description field.
Function Description
Detailed
explanation
Model adaptive control
This realizes a high response and stable control following the ideal model. The two-
degrees-of-freedom-model model adaptive control enables you to set a response to
the command and response to the disturbance separately. Additionally, this function
can be disabled. Refer to section 7.5 for disabling this function. This is used with
servo amplifiers with software version B4 or later.
Position control mode This servo amplifier is used as a position control servo.
Speed control mode This servo amplifier is used as a speed control servo.
Torque control mode This servo amplifier is used as a torque control servo.
High-resolution encoder
High-resolution encoder of 4194304 pulses/rev is used as the encoder of the rotary
servo motor compatible with the MELSERVO-J4 series.
Absolute position detection
system
Merely setting a home position once makes home position return unnecessary at
every power-on.
Chapter 12
Gain switching function
You can switch gains during rotation and during stop, and can use an input device to
switch gains during operation.
Section 7.2
Advanced vibration
suppression control II
This function suppresses vibration at the arm end or residual vibration. Section 7.1.5
Machine resonance
suppression filter
This is a filter function (notch filter) which decreases the gain of the specific frequency
to suppress the resonance of the mechanical system.
Section 7.1.1
Shaft resonance suppression
filter
When a load is mounted to the servo motor shaft, resonance by shaft torsion during
driving may generate a mechanical vibration at high frequency. The shaft resonance
suppression filter suppresses the vibration.
Section 7.1.3
Adaptive filter II
Servo amplifier detects mechanical resonance and sets filter characteristics
automatically to suppress mechanical vibration.
Section 7.1.2
Low-pass filter
Suppresses high-frequency resonance which occurs as servo system response is
increased.
Section 7.1.4
Machine analyzer function
Analyzes the frequency characteristic of the mechanical system by simply connecting
a MR Configurator2 installed personal computer and servo amplifier.
MR Configurator2 is necessary for this function.
Robust filter
This function provides better disturbance response in case low response level that
load to motor inertia ratio is high for such as roll send axes.
[Pr. PE41]
Slight vibration suppression
control
Suppresses vibration of ±1 pulse produced at a servo motor stop. [Pr. PB24]
Auto tuning
Automatically adjusts the gain to optimum value if load applied to the servo motor
shaft varies.
Section 6.3
Brake unit
Used when the regenerative option cannot provide enough regenerative power.
Can be used for the 5 kW or more servo amplifier.
Section 11.3
Power regeneration converter
Used when the regenerative option cannot provide enough regenerative power.
Can be used for the 5 kW or more servo amplifier.
Section 11.4
Multifunction regeneration
converter
Use this function if the regenerative option does not have sufficient regenerative
capacity.
Section 11.19
Regenerative option
Used when the built-in regenerative resistor of the servo amplifier does not have
sufficient regenerative capability for the regenerative power generated.
Section 11.2
Alarm history clear Alarm history is cleared. [Pr. PC21]
Output signal selection
(device settings)
The output devices including ALM (Malfunction) and DB (Dynamic brake interlock)
can be assigned to certain pins of the CN3 connector.
[Pr. PD07] to
[Pr. PD09]
Output signal (DO) forced
output
Output signal can be forced on/off independently of the servo status.
Use this function for checking output signal wiring, etc.
Section 4.5.1
(1) (d)
Test operation mode
Jog operation, positioning operation, motor-less operation, DO forced output, and
program operation can be used.
MR Configurator2 is necessary for this function.
Section 4.5
Analog monitor output Servo status is output in terms of voltage in real time.
[Pr. PC09],
[Pr. PC10]
MR Configurator2
Using a personal computer, you can perform the parameter setting, test operation,
monitoring, and others.
Section 11.7
Linear servo system Linear servo system can be configured using a linear servo motor and linear encoder. Chapter 14
1. FUNCTIONS AND CONFIGURATION
1 - 22
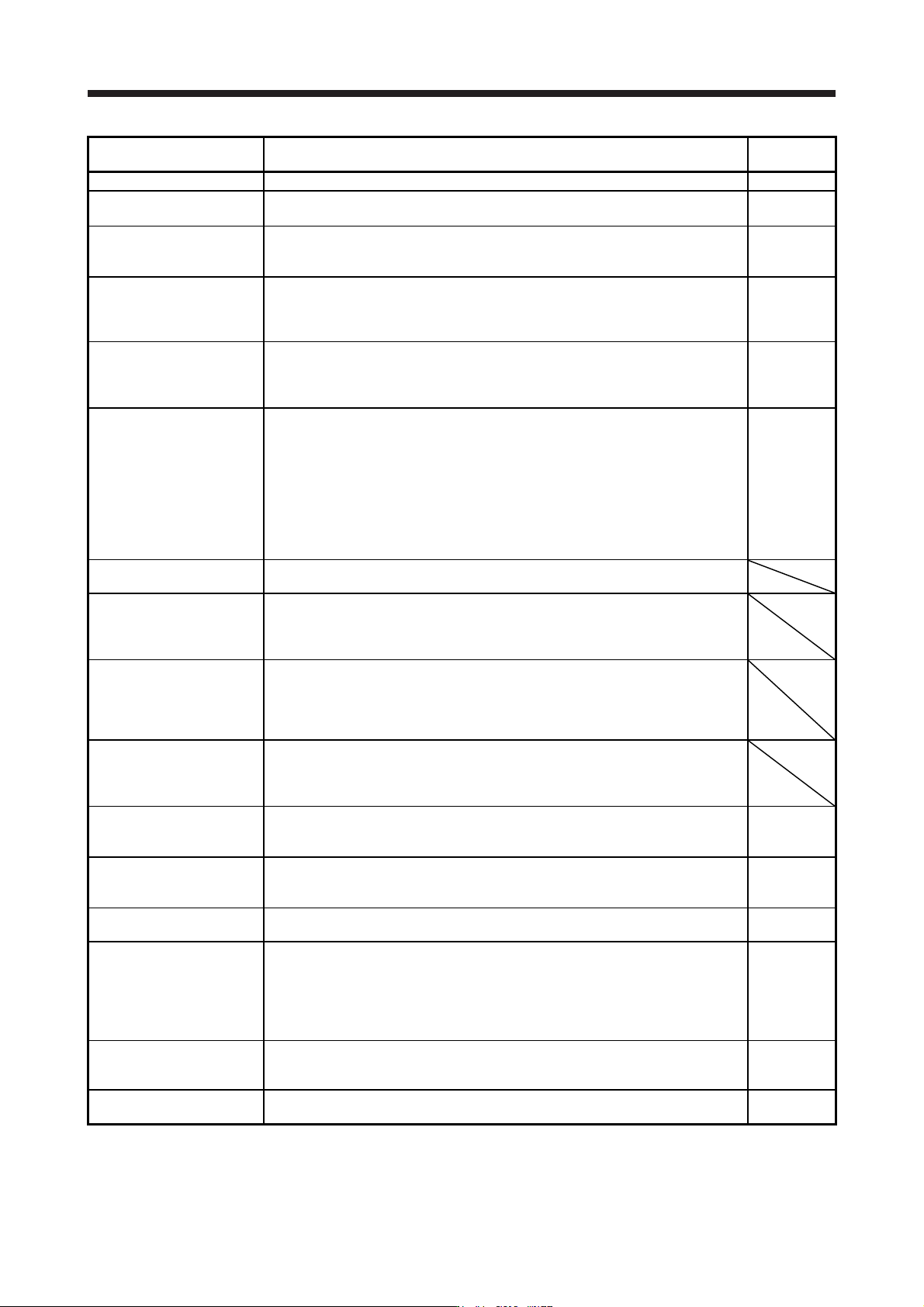
Function Description
Detailed
explanation
Direct drive servo system Direct drive servo system can be configured to drive a direct drive motor. Chapter 15
Fully closed loop system
Fully closed loop system can be configured using the load-side encoder.
This is used with servo amplifiers with software version A3 or later.
Chapter 16
One-touch tuning
Gain adjustment is performed just by one click on a certain button on MR
Configurator2.
MR Configurator2 is necessary for this function.
Section 6.2
SEMI-F47 function (Note)
Enables to avoid triggering [AL. 10 Undervoltage] using the electrical energy charged
in the capacitor in case that an instantaneous power failure occurs during operation.
Use a 3-phase for the input power supply of the servo amplifier. Using a 1-phase 100
V AC/200 V AC for the input power supply will not comply with SEMI-F47 standard.
[Pr. PA20]
[Pr. PF25]
Section 7.4
Tough drive function
This function makes the equipment continue operating even under the condition that
an alarm occurs.
The tough drive function includes two types: the vibration tough drive and the
instantaneous power failure tough drive.
Section 7.3
Drive recorder function
This function continuously monitors the servo status and records the status transition
before and after an alarm for a fixed period of time. You can check the recorded data
on the drive recorder window on MR Configurator2 by clicking the "Graph" button.
However, the drive recorder will not operate on the following conditions.
1. You are using the graph function of MR Configurator2.
2. You are using the machine analyzer function.
3. [Pr. PF21] is set to "-1".
4. The controller is not connected (except the test operation mode).
5. An alarm related to the controller is occurring.
[Pr. PA23]
STO function
This function is a functional safety that complies with IEC/EN 61800-5-2. You can
create a safety system for the equipment easily.
Servo amplifier life diagnosis
function
You can check the cumulative energization time and the number of on/off times of the
inrush relay. This function gives an indication of the replacement time for parts of the
servo amplifier including a capacitor and a relay before they malfunction.
MR Configurator2 is necessary for this function.
Power monitoring function
This function calculates the power running energy and the regenerative power from
the data in the servo amplifier such as speed and current. For the SSCNET III/H
system, MR Configurator2 can display the data, including the power consumption.
Since the servo amplifier can send the data to a servo system controller, you can
analyze the data and display the data on a display.
Machine diagnosis function
From the data in the servo amplifier, this function estimates the friction and vibrational
component of the drive system in the equipment and recognizes an error in the
machine parts, including a ball screw and bearing.
MR Configurator2 is necessary for this function.
Master-slave operation
function
The function transmits a master axis torque to slave axes using driver communication
and the torque as a command drives slave axes by torque control.
This is used with servo amplifiers with software version A8 or later.
Section 17.2
Scale measurement function
The function transmits position information of a scale measurement encoder to the
controller by connecting the scale measurement encoder in semi closed loop control.
This is used with servo amplifiers with software version A8 or later.
Section 17.3
J3 compatibility mode
This amplifier has "J3 compatibility mode" which compatible with the previous MR-J3-
B series. Refer to section 17.1 for software versions.
Section 17.1
Continuous operation to
torque control mode
This enables to smoothly switch the mode from position control mode/speed control
mode to torque control mode without stopping. This also enables to decrease load to
the machine and high quality molding without rapid changes in speed or torque. For
details of the continuous operation to torque control mode, refer to the manuals for
servo system controllers.
[Pr. PB03]
[Pr. PB09]
Refer to the
servo system
controller
manual used.
Lost motion compensation
function
This function improves the response delay occurred when the machine moving
direction is reversed. This is used with servo amplifiers with software version B4 or
later.
Section 7.6
Super trace control
This function sets constant and uniform acceleration/deceleration droop pulses to
almost 0. This is used with servo amplifiers with software version B4 or later.
Section 7.7
Note. For servo s
y
stem controllers which are available with this, contact
y
our local sales office.