sh030106u.pdf - 第449页
12. ABSOLUTE PO SITION DETECTIO N SYSTEM 12 - 2 12.1.2 Str ucture The followi ng shows a confi gurat ion of the a bsolute p os ition de tectio n system . Refer to se ction 11.8 fo r each battery con nection. Servo system…
12. ABSOLUTE POSITION DETECTION SYSTEM
12 - 1
12. ABSOLUTE POSITION DETECTION SYSTEM
CAUTION
If [AL. 25 Absolute position erased] or [AL. E3 Absolute position counter warning]
has occurred, always perform home position setting again. Otherwise, it may
cause an unexpected operation.
If [AL. 25], [AL. 92], or [AL. 9F] occurs due to such as short circuit of the battery,
the MR-BAT6V1 battery can become hot. Use the MR-BAT6V1 battery with case
to prevent getting burnt.
POINT
Refer to section 11.8 for the replacement procedure of the battery.
There are three types of batteries, MR-BAT6V1SET, MR-BAT6V1BJ, and MR-
BT6VCASE available to construct the absolute position detection system. MR-
BAT6V1BJ has the following advantages compared to other batteries.
You can disconnect the encoder cable from the servo amplifier.
You can replace the battery with the control circuit power supply off.
When absolute position data is erased from the encoder, always execute home
position setting before operation. The absolute position data of the encoder will
be erased in the followings. Additionally, when the battery is used out of
specification, the absolute position data can be erased.
MR-BAT6V1SET and MR-BT6VCASE
The encoder cable was disconnected.
The battery was replaced when the control circuit power supply was off.
MR-BAT6V1BJ
A connector or cable was disconnected between the servo motor and battery.
The battery was replaced with procedures other than those of (6) in section
11.8.3.
12.1 Summary
12.1.1 Features
For normal operation, the encoder consists of a detector designed to detect a position within one revolution
and a cumulative revolution counter designed to detect the number of revolutions.
The absolute position detection system always detects the absolute position of the machine and keeps it
battery-backed, independently of whether the servo system controller power is on or off. Therefore, once
home position return is made at the time of machine installation, home position return is not needed when
power is switched on thereafter.
Even at a power failure or a malfunction, the system can be easily restored.
12. ABSOLUTE POSITION DETECTION SYSTEM
12 - 2
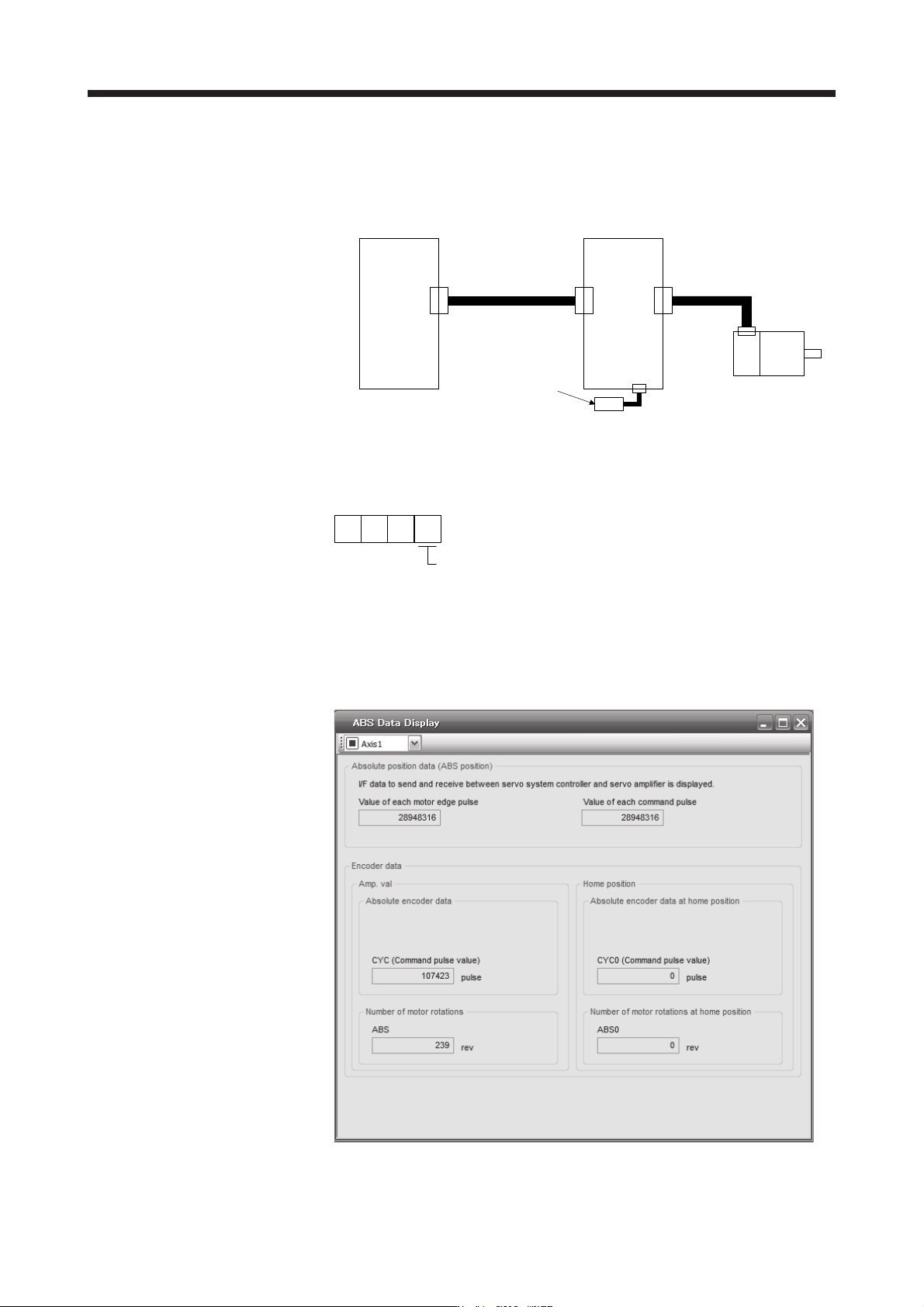
12.1.2 Structure
The following shows a configuration of the absolute position detection system. Refer to section 11.8 for each
battery connection.
Servo system controller Servo amplifier
CN1A
Servo motor
CN2
Battery
CN4
12.1.3 Parameter setting
Set "_ _ _ 1" in [Pr. PA03] to enable the absolute position detection system.
Absolute position detection system selection
0: Disabled (used in incremental system)
1: Enabled (used in absolute position detection system
)
[Pr. PA03]
1
12.1.4 Confirmation of absolute position detection data
You can check the absolute position data with MR Configurator2. Choose "Monitor" and "ABS Data Display"
to open the absolute position data display screen.
12. ABSOLUTE POSITION DETECTION SYSTEM
12 - 3
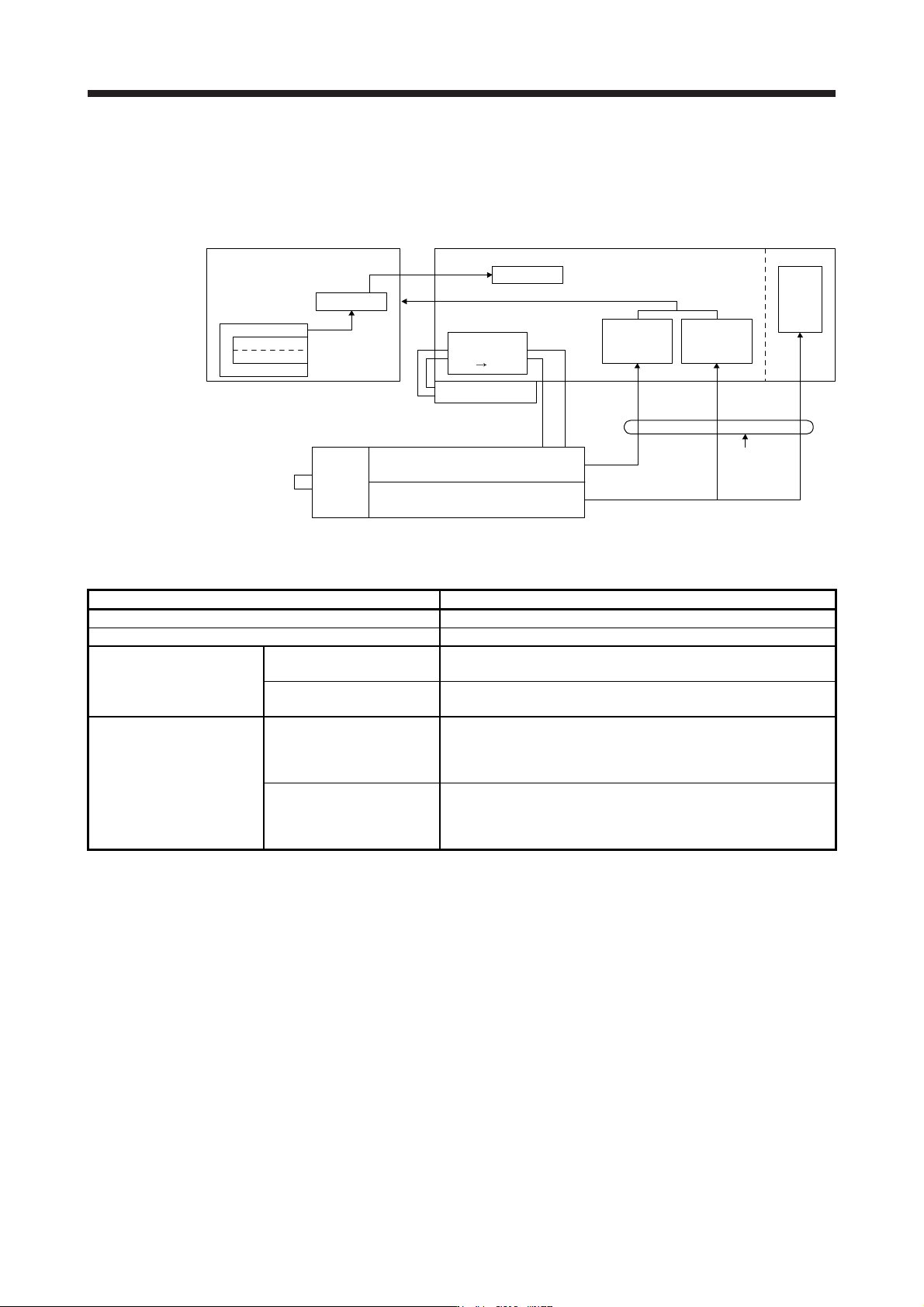
12.2 Battery
12.2.1 Using MR-BAT6V1SET battery
(1) Configuration diagram
CYC0
Current position
Home position data
LS0
Position data
LS
Detecting the
number of
revolutions
CYC
Detecting the
position at
one revolution
Servo motor
Cumulative revolution counter
(1 pulse/rev)
One-revolution counter
High speed
serial
communication
Servo amplifierServo system controller
MR-BAT6V1SET
Battery
Position control
Speed control
Step-down
circuit
(6 V 3.4 V)
(2) Specifications
(a) Specification list
Item Description
System Electronic battery backup type
Maximum revolution range Home position ± 32767 rev.
(Note 1)
Maximum speed at power
failure [r/min]
Rotary servo motor
6000
(only when acceleration time until 6000 r/min is 0.2 s or more)
Direct drive motor
500
(only when acceleration time until 500 r/min is 0.1 s or more)
(Note 2)
Battery backup time
Rotary servo motor
Approximately 20,000 hours
(equipment power supply: off, ambient temperature: 20 ˚C)
Approximately 29,000 hours
(power-on time ratio: 25%, ambient temperature: 20 °C) (Note 3)
Direct drive motor
Approximately 5,000 hours
(equipment power supply: off, ambient temperature: 20 ˚C)
Approximately 15,000 hours
(power-on time ratio: 25%, ambient temperature: 20 °C) (Note 3)
Note 1. Maximum speed available when the shaft is rotated by external force at the time of power failure or the like. Also, if power is
switched on at the servo motor speed of 3000 r/min or hi
g
her, position mismatch ma
y
occur due to external force or the like.
2. The data-holding time by the battery using MR-BAT6V1SET. Replace the batteries within three years since the operation start
regardless of the power supply of the servo amplifier on/off. If the battery is used out of specification, [AL. 25 Absolute position
erased] ma
y
occur.
3. The powe
r
-on time ratio 25% is equivalent to 8 hours power on for a weekda
y
and off for a weekend.