sh030106u.pdf - 第486页
14. USIN G A LINEAR SER VO MOTOR 14 - 19 (b) Setting proced ure 1) Perform the ma gnetic po le detect ion, an d incr ease the settin g value of [Pr. P L09 Magn etic pole detection vo ltage leve l] until [A L. 50 Ov erloa…
14. USING A LINEAR SERVO MOTOR
14 - 18
3) After the completion of the magnetic pole detection, change [Pr. PL01] to "_ _ _ 0" (Magnetic pole
detection disabled).
[Pr. PL01]
Magnetic pole detection disabled
0
After the magnetic pole detection, by disabling the magnetic pole detection function with [Pr. PL01],
the magnetic pole detection after each power-on is not required.
(4) Magnetic pole detection method setting
POINT
In the following cases, set the magnetic pole detection method to the minute
position detection method.
When a shorten travel distance at the magnetic pole detection is required
When the magnetic pole detection by the position detection method is not
completed
When a linear encoder with a resolution smaller than 0.05 μm is used and the
magnetic pole detection does not complete normally by minute position
detection method, select "Enabled (1 _ _ _)" of "Minute position detection
method - High-resolution encoder selection" in [Pr. PL08].
Set the magnetic pole detection method using the first digit of [Pr. PL08] (Magnetic pole detection
method selection).
[Pr. PL08]
Magnetic pole detection method selection
0: Position detection method
4: Minute position detection method
(5) Setting of the magnetic pole detection voltage level by the position detection method
For the magnetic pole detection by the position detection method, set the voltage level with [Pr. PL09
Magnetic pole detection voltage level]. For the magnetic pole detection by the minute position detection
method, the voltage level setting is not required.
(a) Guideline of parameter settings
Set the parameters by referring to the following table.
[Pr. PL09] setting
(guide value)
Servo status
Small ← Medium → Large
(10 or less (initial value) 50 or more)
Thrust at operation Small Large
Overload, overcurrent alarm Seldom occurs Frequently occurs
Magnetic pole detection alarm Frequently occurs Seldom occurs
Magnetic pole detection accuracy Low High
14. USING A LINEAR SERVO MOTOR
14 - 19
(b) Setting procedure
1) Perform the magnetic pole detection, and increase the setting value of [Pr. PL09 Magnetic pole
detection voltage level] until [AL. 50 Overload 1], [AL. 51 Overload 2], [AL. 33 Overvoltage], [AL.
E1 Overload warning 1], and [AL. EC Overload warning 2] occur. Increase the setting value by
five as a guide value. When these alarms and warnings occur during the magnetic pole detection
by using MR Configurator2, the test operation of MR Configurator2 automatically completes and
the servo-off status is established.
2) Specify the setting value that is an approximately 70% of the value set when [AL. 50 Overload 1],
[AL. 51 Overload 2], [AL. 33 Overvoltage], [AL. E1 Overload warning 1], and [AL. EC Overload
warning 2] occurred as the final setting value. However, if [AL. 27 Initial magnetic pole detection
error] occurs with this value, specify a value intermediate between the value set at [AL. 50
Overload 1], [AL. 51 Overload 2], [AL. 33 Overvoltage], [AL. E1 Overload warning 1], and [AL. EC
Overload warning 2] and the value set at the magnetic pole detection alarm as the final setting
value.
3) Perform the magnetic pole detection again with the final setting value to check there is no
problem.
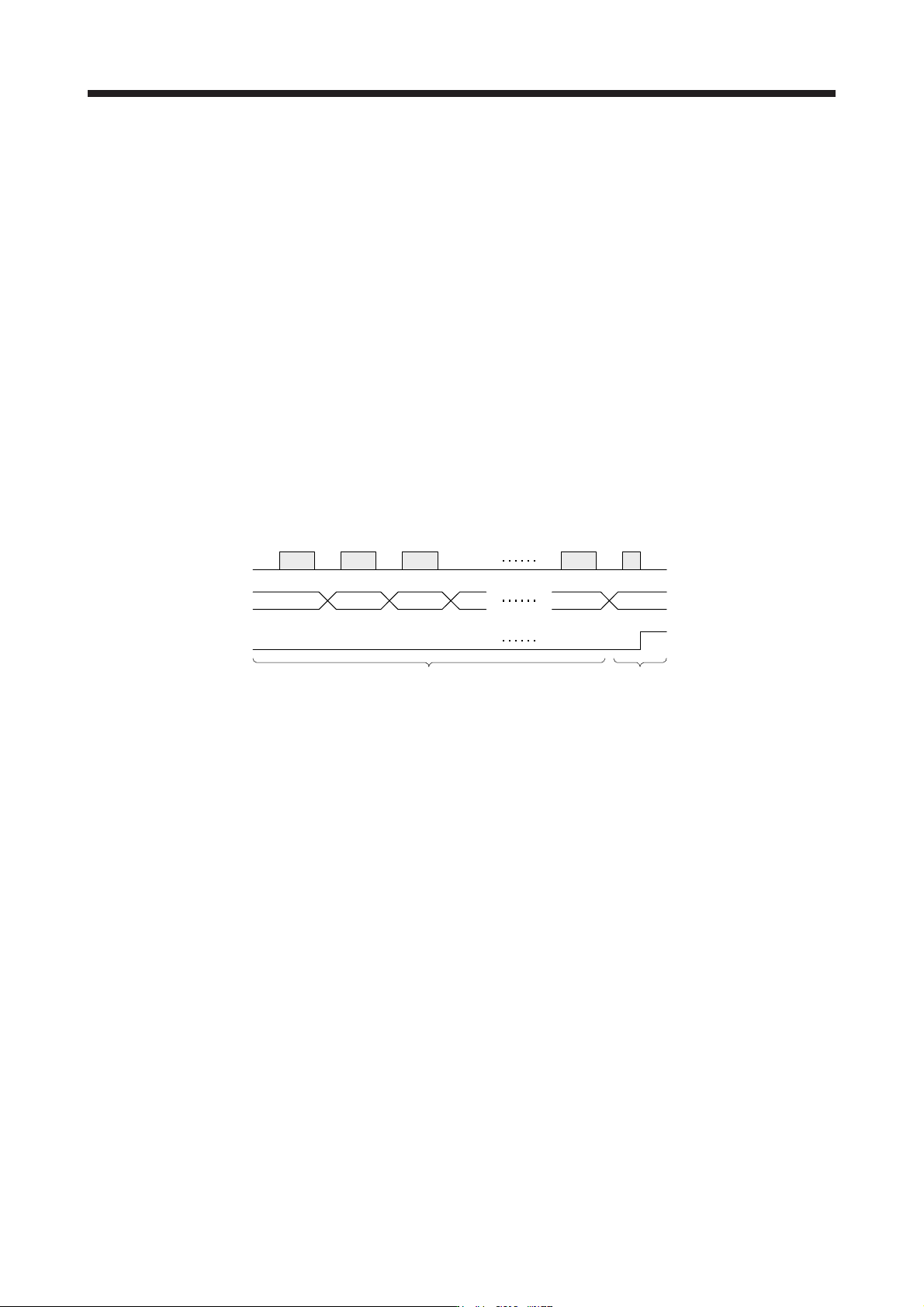
(c) Setting example
Occurring
Not occurring
Linear encoder magnetic
pole detection
[Pr. PL09] setting
Alarm
An alarm has occurred when the setting
value of [Pr. PL09] is set to "70".
While increasing the setting value of [Pr. PL09], carry out the
magnetic pole detection repeatedly.
30 35 40 45 65 70
In this example, the final setting value of [Pr. PL09] is 49 (Setting value at the alarm occurrence = 70
× 0.7).
14. USING A LINEAR SERVO MOTOR
14 - 20
14.3.3 Home position return
POINT
The incremental linear encoder and the absolute position linear encoder have
different reference home positions at the home position return.
(1) Incremental linear encoder
CAUTION
If the resolution or the stop interval (the third digit of [Pr. PL01]) of the linear
encoder is large, it is very dangerous since the linear servo motor may crash into
the stroke end.
(a) When the linear encoder home position (reference mark) exists in the home position return direction
When an incremental linear encoder is used, the reference home position is the position per
1048576 pulses (changeable with the third digit of [Pr. PL01]) with reference to the linear encoder
home position (reference mark) that is passed through first after a home position return start.
Change the setting value of [Pr. PL01] according to the linear encoder resolution.
[Pr. PL01]
Stop interval setting at the home position return
Setting
value
Stop interval [pulse]
0 8192
1 131072
2 262144
3 1048576 (initial value)
4 4194304
5 16777216
6 67108864
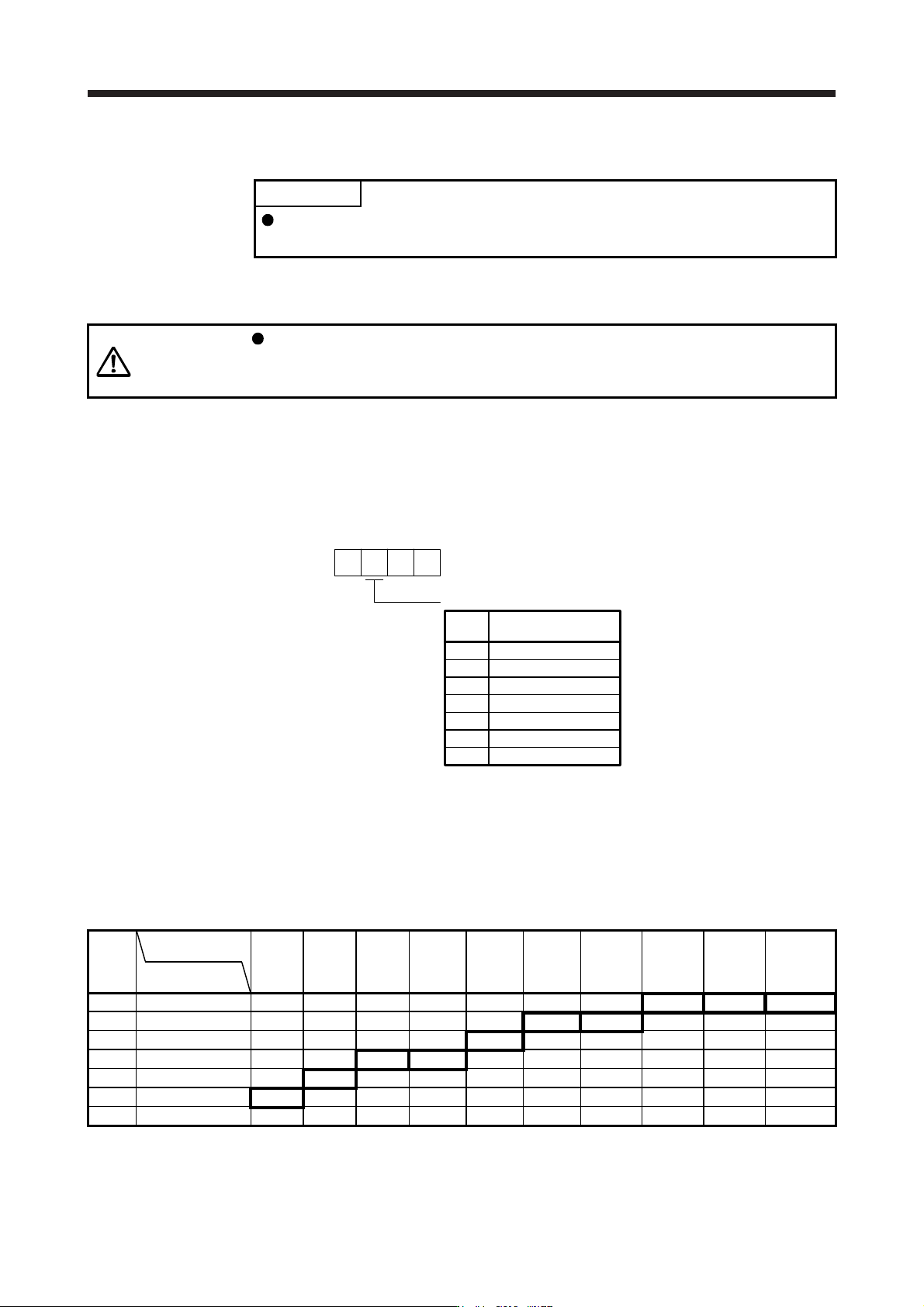
The following shows the relation between the stop interval at the home position return and the linear
encoder resolution. For example, when the linear encoder resolution is 0.001 μm and the parameter
for the stop interval at the home position return, [Pr. PL01], is set to "_ 5 _ _" (16777216 pulses), the
stop interval is 16.777 mm. The value inside a bold box indicates the recommended stop interval for
each linear encoder resolution.
[Unit: mm]
Pr. PL01
Linear encoder
resolution [µm]
0.001 0.005 0.01 0.02 0.05 0.1 0.2 0.5 1 2
Stop interval
[pulse]
_ 0 _ _ 8192 0.008 0.041 0.082 0.164 0.410 0.819 1.638 4.096 8.192 16.384
_ 1 _ _ 131072 0.131 0.655 1.311 2.621 6.554 13.107 26.214 65.536 131.072 262.144
_ 2 _ _ 262144 0.262 1.311 2.621 5.243 13.107 26.214 52.429 131.072 262.144 524.288
_ 3 _ _ 1048576 1.049 5.243 10.486 20.972 52.429 104.858 209.715 524.288 1048.576 2097.152
_ 4 _ _ 4194304 4.194 20.972 41.943 83.886 209.715 419.430 838.861 2097.152 4194.304 8388.608
_ 5 _ _ 16777216 16.777 83.886 167.772 335.544 838.861 1677.722 3355.443 8388.608 16777.216 33554.432
_ 6 _ _ 67108864 67.109 335.544 671.089 1342.177 3355.443 6710.886 13421.773 33554.432 67108.864 134217.728