sh030106u.pdf - 第488页
14. USIN G A LINEAR SER VO MOTOR 14 - 21 In the cas e of a prox imity d og type home pos ition r eturn, th e neares t referenc e home p osition after proxim ity dog off is th e hom e positio n. Set one linear encoder ho …
14. USING A LINEAR SERVO MOTOR
14 - 20
14.3.3 Home position return
POINT
The incremental linear encoder and the absolute position linear encoder have
different reference home positions at the home position return.
(1) Incremental linear encoder
CAUTION
If the resolution or the stop interval (the third digit of [Pr. PL01]) of the linear
encoder is large, it is very dangerous since the linear servo motor may crash into
the stroke end.
(a) When the linear encoder home position (reference mark) exists in the home position return direction
When an incremental linear encoder is used, the reference home position is the position per
1048576 pulses (changeable with the third digit of [Pr. PL01]) with reference to the linear encoder
home position (reference mark) that is passed through first after a home position return start.
Change the setting value of [Pr. PL01] according to the linear encoder resolution.
[Pr. PL01]
Stop interval setting at the home position return
Setting
value
Stop interval [pulse]
0 8192
1 131072
2 262144
3 1048576 (initial value)
4 4194304
5 16777216
6 67108864
The following shows the relation between the stop interval at the home position return and the linear
encoder resolution. For example, when the linear encoder resolution is 0.001 μm and the parameter
for the stop interval at the home position return, [Pr. PL01], is set to "_ 5 _ _" (16777216 pulses), the
stop interval is 16.777 mm. The value inside a bold box indicates the recommended stop interval for
each linear encoder resolution.
[Unit: mm]
Pr. PL01
Linear encoder
resolution [µm]
0.001 0.005 0.01 0.02 0.05 0.1 0.2 0.5 1 2
Stop interval
[pulse]
_ 0 _ _ 8192 0.008 0.041 0.082 0.164 0.410 0.819 1.638 4.096 8.192 16.384
_ 1 _ _ 131072 0.131 0.655 1.311 2.621 6.554 13.107 26.214 65.536 131.072 262.144
_ 2 _ _ 262144 0.262 1.311 2.621 5.243 13.107 26.214 52.429 131.072 262.144 524.288
_ 3 _ _ 1048576 1.049 5.243 10.486 20.972 52.429 104.858 209.715 524.288 1048.576 2097.152
_ 4 _ _ 4194304 4.194 20.972 41.943 83.886 209.715 419.430 838.861 2097.152 4194.304 8388.608
_ 5 _ _ 16777216 16.777 83.886 167.772 335.544 838.861 1677.722 3355.443 8388.608 16777.216 33554.432
_ 6 _ _ 67108864 67.109 335.544 671.089 1342.177 3355.443 6710.886 13421.773 33554.432 67108.864 134217.728
14. USING A LINEAR SERVO MOTOR
14 - 21
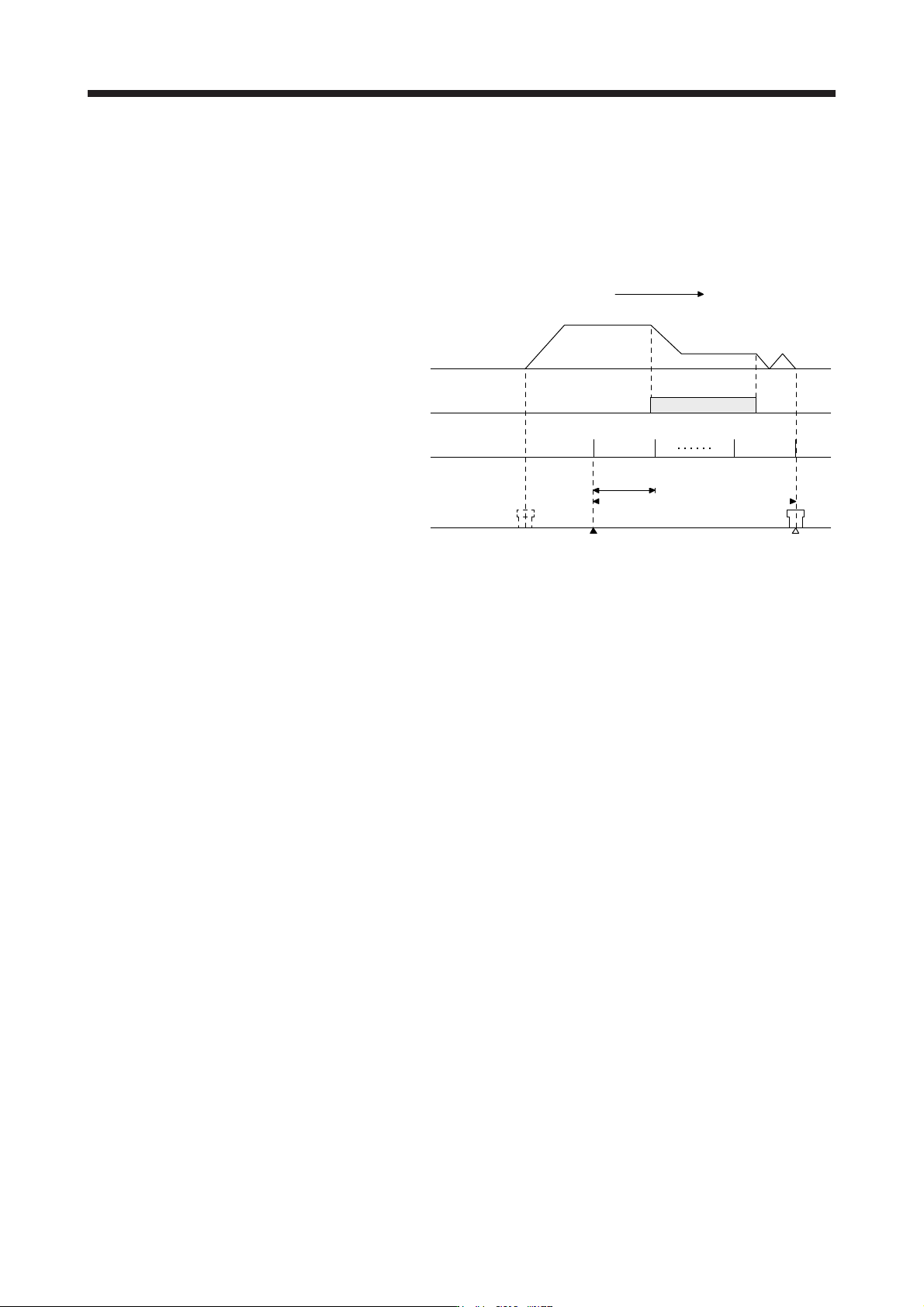
In the case of a proximity dog type home position return, the nearest reference home position after
proximity dog off is the home position.
Set one linear encoder home position in the full stroke, and set it in the position that can always be
passed through after a home position return start. LZ (Encoder Z-phase pulse) cannot be used.
When two or more reference marks exist during the full stroke of the linear encoder, select "Enabled
(_ _ 1 _)" of "Linear scale multipoint Z-phase input function selection" in [Pr. PC17].
Linear encoder home position Home position
Home position return speed
Creep speed
Home position return direction
ON
OFF
Proximity dog
signal
Linear servo
motor
Reference home
position
Linear servo motor
position
0 mm/s
(Note)
1048576 pulses
1048576 pulses × n
Note. Chan
g
eable with [Pr. PL01].
14. USING A LINEAR SERVO MOTOR
14 - 22
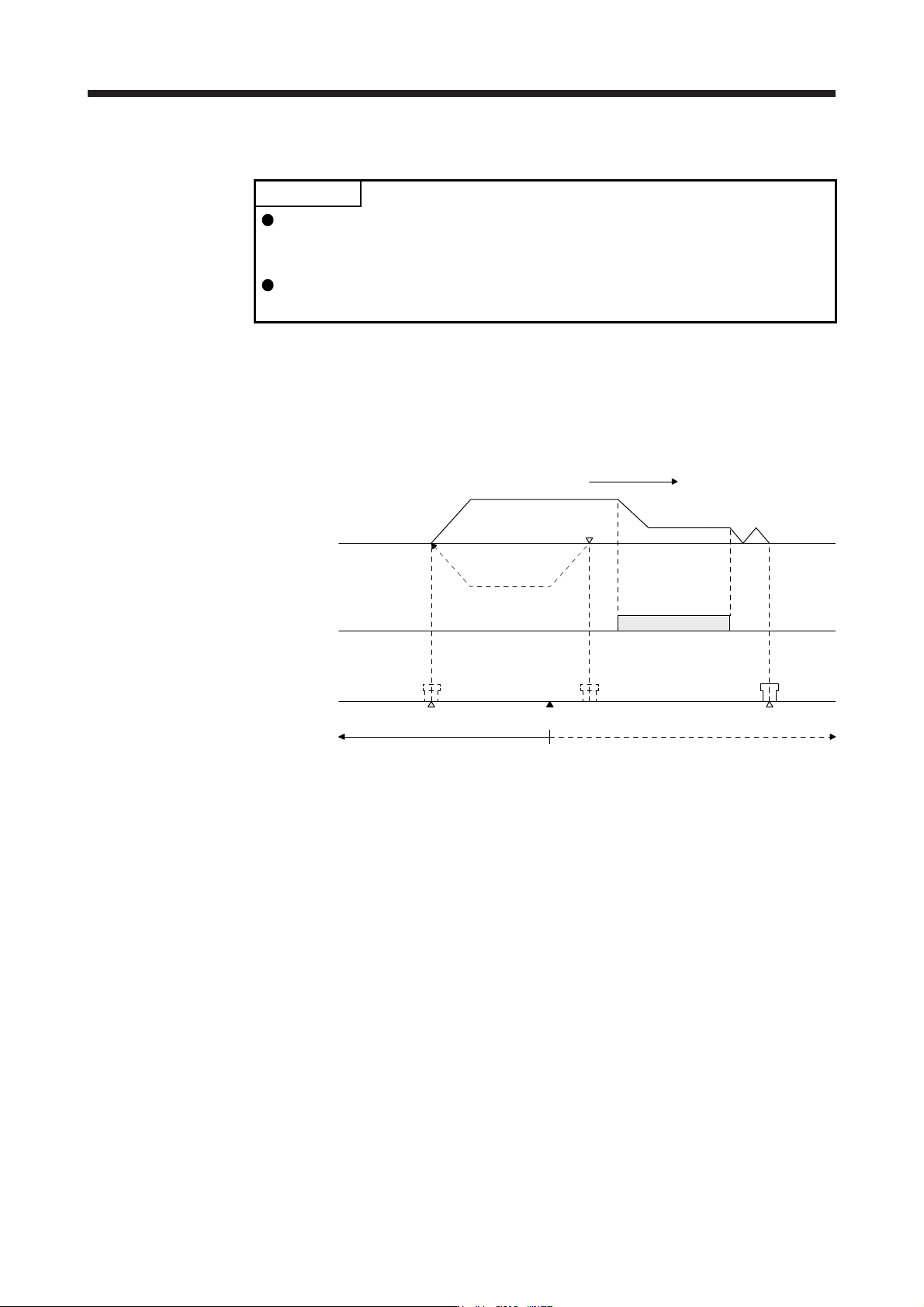
(b) When the linear encoder home position does not exist in the home position return direction
POINT
To execute a home position return securely, start a home position return after
moving the linear servo motor to the opposite stroke end with JOG operation
from the controller and others.
Change the third digit value of [Pr. PL01] according to the linear encoder
resolution.
If the home position return is performed from the position where the linear encoder does not exist in
the home position return direction, a home position return error occurs on the controller. The error
contents differ according to the controller type. Move the linear servo motor to the stroke end on the
opposite side of the home position return direction with the JOG operation from the controller and
others, and then perform a home position return.
Stroke end
Home position
Home position return speed
Creep speed
Home position return direction
ON
OFF
JOG operation
Home position returnable area Home position non-returnable area
0 mm/s
Linear encoder home position
Linear servo
motor
Proximity dog
signal
Linear servo motor
position