sh030106u.pdf - 第489页
14. USIN G A LINEAR SER VO MOTOR 14 - 22 (b) When th e linear encoder home position does not exis t in t he hom e positi on retur n direc tion POINT To execute a h ome posi tion return sec urely, start a home p ositi on …
14. USING A LINEAR SERVO MOTOR
14 - 21
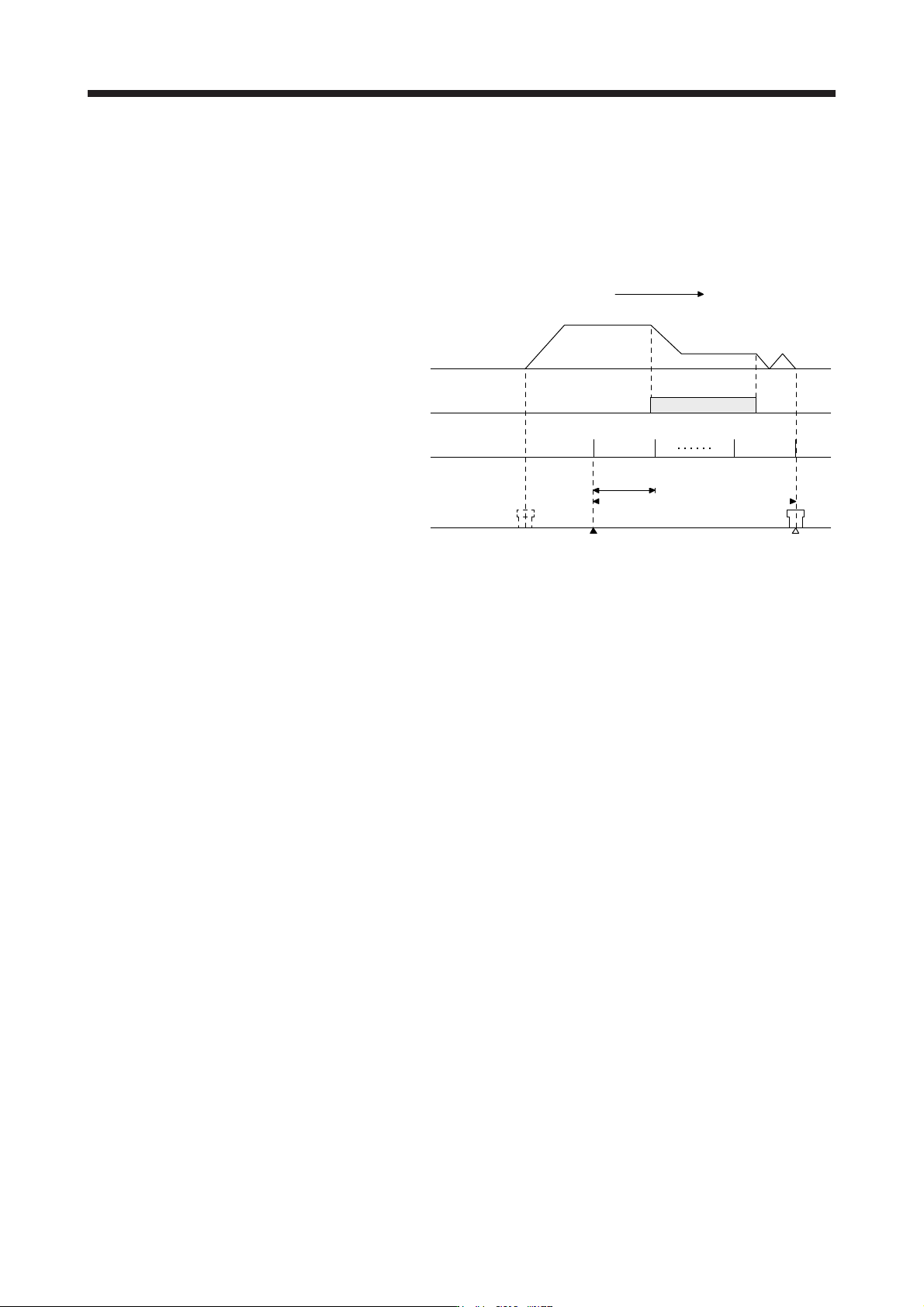
In the case of a proximity dog type home position return, the nearest reference home position after
proximity dog off is the home position.
Set one linear encoder home position in the full stroke, and set it in the position that can always be
passed through after a home position return start. LZ (Encoder Z-phase pulse) cannot be used.
When two or more reference marks exist during the full stroke of the linear encoder, select "Enabled
(_ _ 1 _)" of "Linear scale multipoint Z-phase input function selection" in [Pr. PC17].
Linear encoder home position Home position
Home position return speed
Creep speed
Home position return direction
ON
OFF
Proximity dog
signal
Linear servo
motor
Reference home
position
Linear servo motor
position
0 mm/s
(Note)
1048576 pulses
1048576 pulses × n
Note. Chan
g
eable with [Pr. PL01].
14. USING A LINEAR SERVO MOTOR
14 - 22
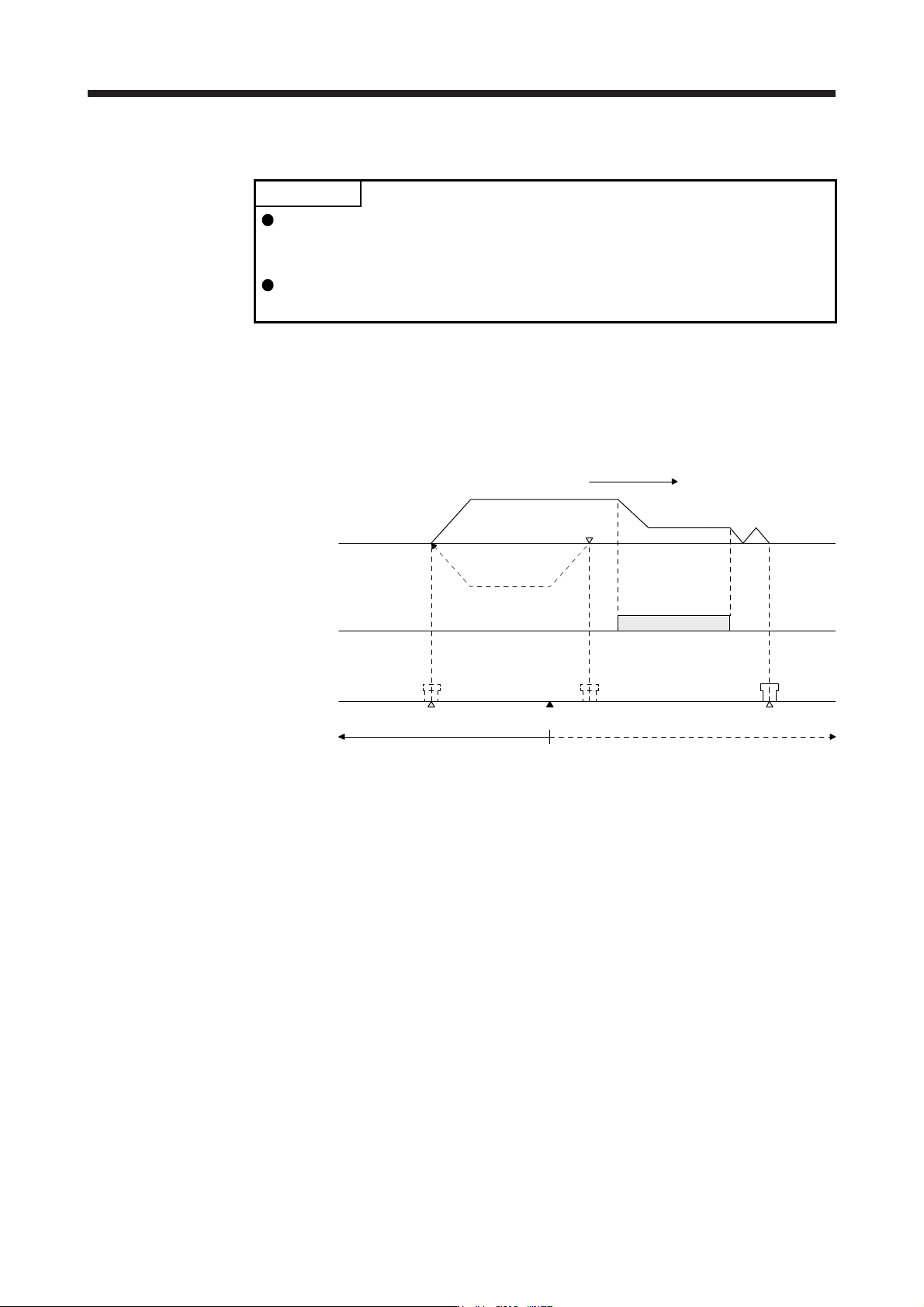
(b) When the linear encoder home position does not exist in the home position return direction
POINT
To execute a home position return securely, start a home position return after
moving the linear servo motor to the opposite stroke end with JOG operation
from the controller and others.
Change the third digit value of [Pr. PL01] according to the linear encoder
resolution.
If the home position return is performed from the position where the linear encoder does not exist in
the home position return direction, a home position return error occurs on the controller. The error
contents differ according to the controller type. Move the linear servo motor to the stroke end on the
opposite side of the home position return direction with the JOG operation from the controller and
others, and then perform a home position return.
Stroke end
Home position
Home position return speed
Creep speed
Home position return direction
ON
OFF
JOG operation
Home position returnable area Home position non-returnable area
0 mm/s
Linear encoder home position
Linear servo
motor
Proximity dog
signal
Linear servo motor
position
14. USING A LINEAR SERVO MOTOR
14 - 23
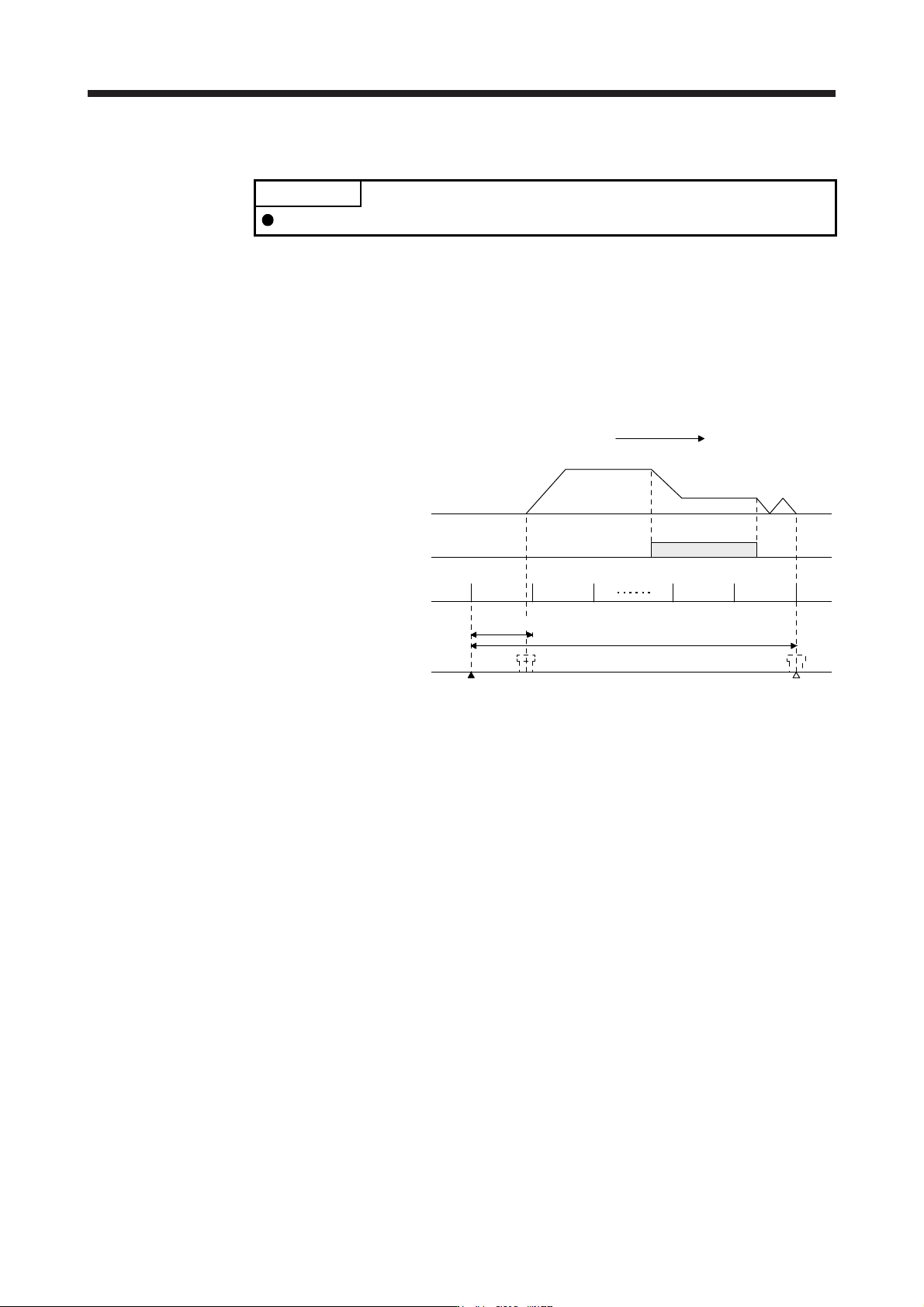
(2) Absolute position linear encoder
POINT
The data set type home position return can also be carried out.
When an absolute linear encoder is used, the reference home position is the position per 1048576
pulses (changeable with the third digit of [Pr. PL01]) with reference to the linear encoder home position
(absolute position data = 0).
In the case of a proximity dog type home position return, the nearest reference home position after
proximity dog off is the home position. The linear encoder home position can be set in any position. LZ
(Encoder Z-phase pulse) is outputted based on "Stop interval selection at the home position return" in
[Pr. PL01].
1048576 pulses × n
Linear encoder home position
Home position
Home position return speed
Creep speed
Home position return direction
ON
OFF
Proximity dog
signal
Linear servo
motor
Reference home
position
Linear servo motor
position
1048576 pulses
0 mm/s
(Note)
Note. Chan
g
eable with [Pr. PL01].