sh030106u.pdf - 第491页
14. USIN G A LINEAR SER VO MOTOR 14 - 24 14.3.4 Tes t operat ion mo de in MR Co nfigurat or2 CAUTION The test operatio n mode is designed for chec king s ervo op eratio n. I t is n ot for checking m achine o perat ion. D…
14. USING A LINEAR SERVO MOTOR
14 - 23
(2) Absolute position linear encoder
POINT
The data set type home position return can also be carried out.
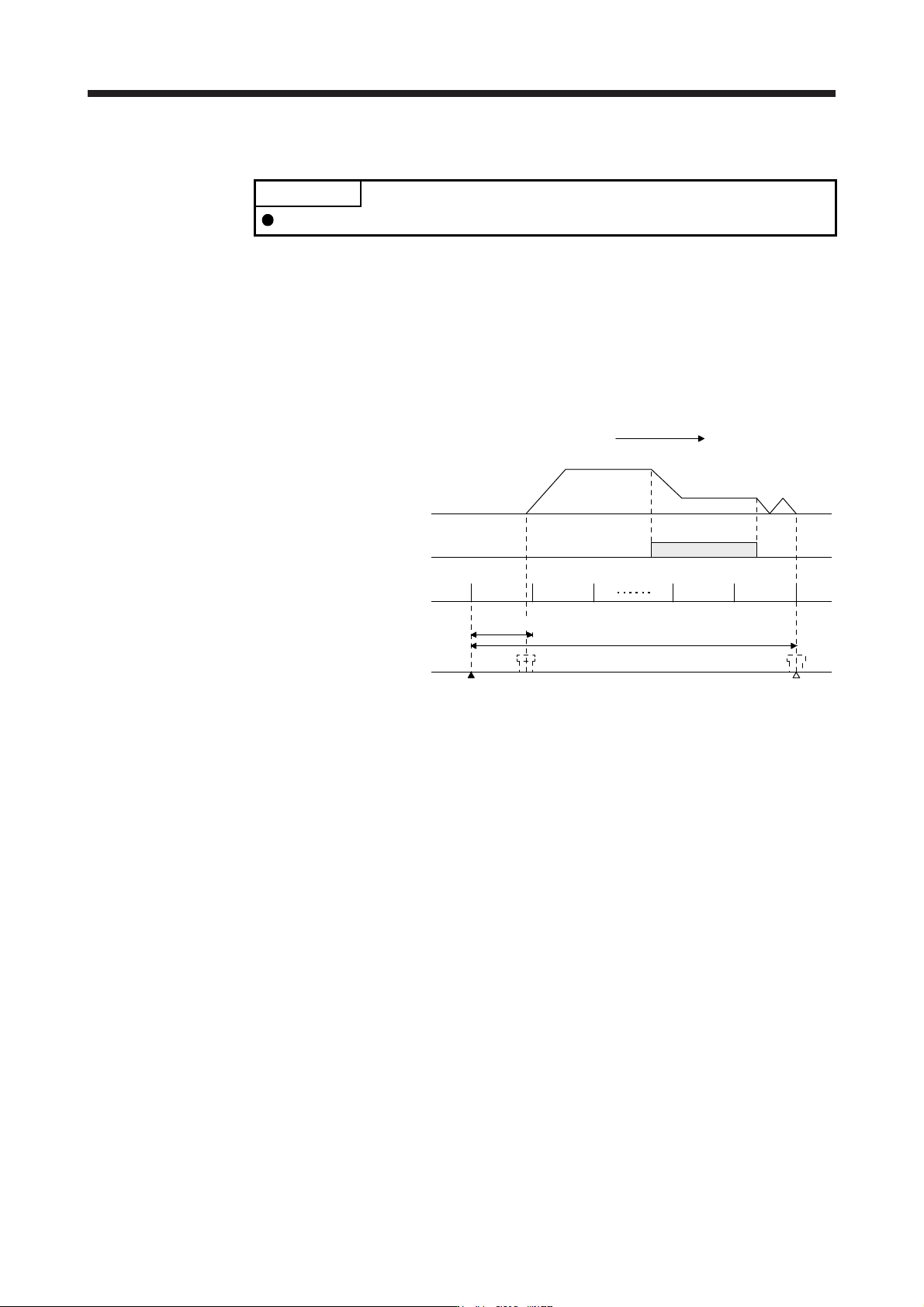
When an absolute linear encoder is used, the reference home position is the position per 1048576
pulses (changeable with the third digit of [Pr. PL01]) with reference to the linear encoder home position
(absolute position data = 0).
In the case of a proximity dog type home position return, the nearest reference home position after
proximity dog off is the home position. The linear encoder home position can be set in any position. LZ
(Encoder Z-phase pulse) is outputted based on "Stop interval selection at the home position return" in
[Pr. PL01].
1048576 pulses × n
Linear encoder home position
Home position
Home position return speed
Creep speed
Home position return direction
ON
OFF
Proximity dog
signal
Linear servo
motor
Reference home
position
Linear servo motor
position
1048576 pulses
0 mm/s
(Note)
Note. Chan
g
eable with [Pr. PL01].
14. USING A LINEAR SERVO MOTOR
14 - 24
14.3.4 Test operation mode in MR Configurator2
CAUTION
The test operation mode is designed for checking servo operation. It is not for
checking machine operation. Do not use this mode with the machine. Always use
the linear servo motor alone.
If the servo motor operates abnormally, use EM2 (Forced stop 2) to stop it.
POINT
The content described in this section indicates the environment where the servo
amplifier and a personal computer are directly connected.
When the test operation mode is selected with the test operation select switch
(SW2-1), the SSCNET III/H communication for the servo amplifier in the test
operation mode and the following servo amplifiers is blocked.
By using a personal computer and MR Configurator2, you can execute the positioning operation, the output
signal (DO) forced output, and the program operation without connecting the servo system controller.
(1) Test operation mode type
(a) Positioning operation
Positioning operation can be performed without using the servo system controller. Use this operation
with the forced stop reset. This operation may be used independently of whether the servo is on or
off and whether the servo system controller is connected or not.
Exercise control on the positioning operation screen of MR Configurator2.
1) Operation pattern
Item Initial value Setting range
Travel distance [pulse] 1048576 0 to 99999999
Speed [mm/s] 10 0 to Maximum speed
Acceleration/deceleration
time constant [ms]
1000 0 to 50000
Repeat pattern
Positive direction travel →
Negative direction travel
Positive direction travel →
Negative direction travel
Positive direction travel →
Positive direction travel
Negative direction travel →
Positive direction travel
Negative direction travel →
Negative direction travel
Dwell time [s] 2.0 01 to 50.0
Number of repeats [time] 1 1 to 9999
2) Operation method
Operation Screen control
Positive direction travel Click "Positive Direction Movement".
Negative direction travel Click "Reverse Direction Movement".
Pause Click "Pause".
Stop Click "Stop".
Forced stop Click "Forced stop".
14. USING A LINEAR SERVO MOTOR
14 - 25
(b) Output signal (DO) forced output
Output signals can be switched on/off forcibly independently of the servo status. This function is
used for output signal wiring check, etc. Exercise control on the DO forced output screen of MR
Configurator2.
(c) Program operation
Positioning operation can be performed in two or more operation patterns combined, without using
the servo system controller. Use this operation with the forced stop reset. This operation may be
used independently of whether the servo is on or off and whether the servo system controller is
connected or not.
Exercise control on the program operation screen of MR Configurator2. For details, refer to Help of
MR Configurator2.
Operation Screen control
Start Click "Operation start".
Pause Click "Pause".
Stop Click "Stop".
Forced stop Click "Forced stop".
(2) Operation procedure
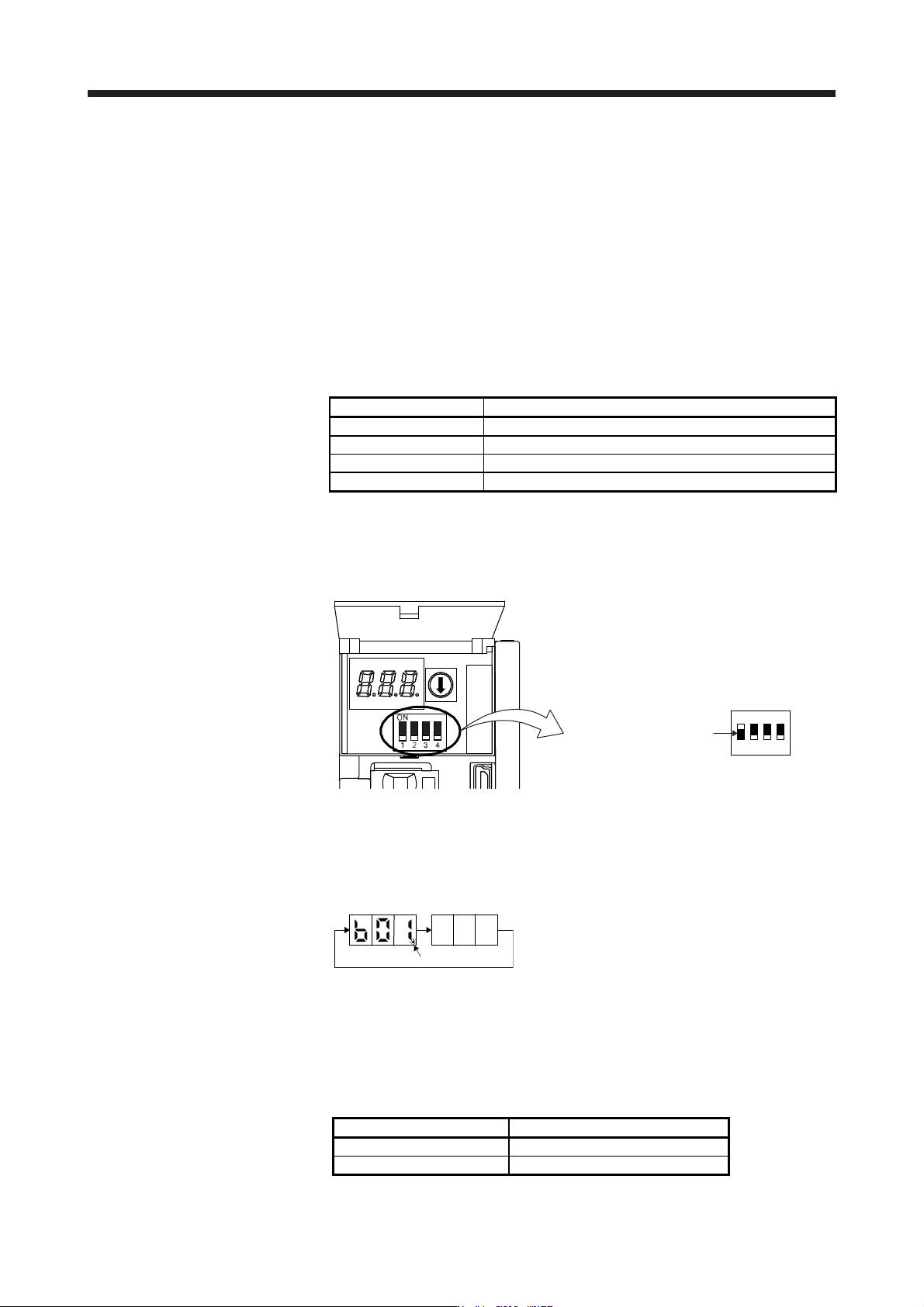
1) Turn off the power.
2) Turn "ON (up)" SW2-1.
Set SW2-1 to "ON (up)".
1
ON
2 3 4
Turning "ON (up)" SW2-1 during power-on will not enable the test operation mode.
3) Turn on the servo amplifier.
When initialization is over, the display shows the following screen.
After 1.6 s
After 0.2 s
Blinking
4) Start operation with the personal computer.
14.3.5 Operation from controller
The linear servo can be used with any of the following controllers.
Servo system controller Model
Motion controller R_MTCPU/Q17_DSCPU
Simple motion module RD77MS_/QD77MS_ /LD77MS_