sh030106u.pdf - 第511页
15. USIN G A DI REC T DRIV E MOTOR 15 - 8 (b) Magnetic pole d etecti on by the m inute position detec tion me thod Is t he tr ave l d is tan ce duri ng the magn etic po le dete ctio n acce ptabl e? (Note 3) Turn the serv…
15. USING A DIRECT DRIVE MOTOR
15 - 7
(1) Magnetic pole detection method by using MR Configurator2
The following shows the magnetic pole detection procedure by using MR Configurator2.
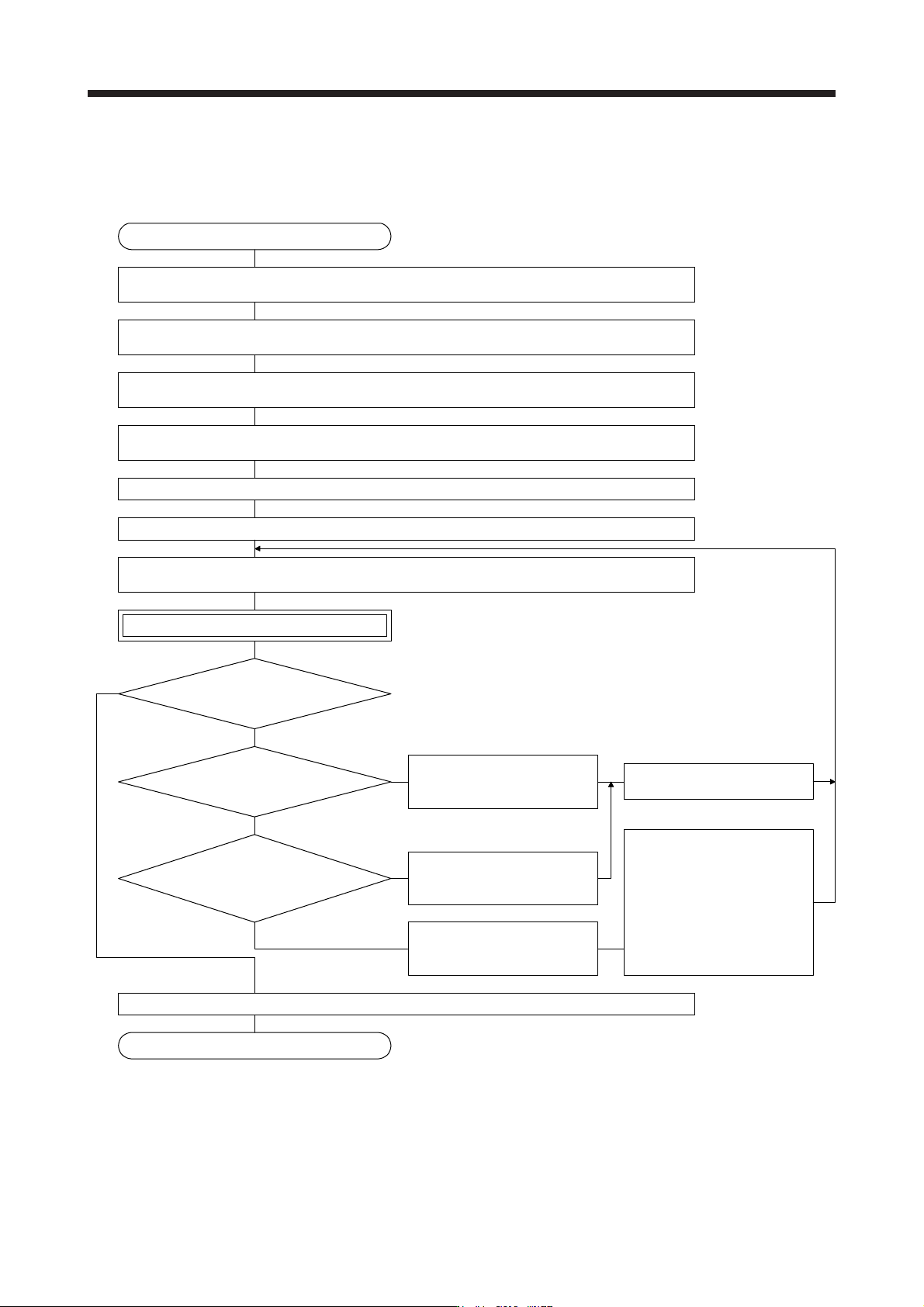
(a) Magnetic pole detection by the position detection method
Have [AL. 32 Overcurrent],
[AL. 50 Overload 1], [AL. 51 Overload 2],
and [AL. E1 Overload warning 1]
occurred?
Check that FLS (Upper stroke limit), RLS (Lower stroke limit), and EM2 (Forced stop 2) are on, and
turn the servo amplifier power off and on again.
1)
Set [Pr. PL09 Magnetic pole detection voltage level] to "10".
Execute "Forward CCW rotation" or "Reverse rotation" with "Positioning CW operation" in the test
operation mode on MR Configurator2. Set the travel distance to "0" at this time.
Set [Pr. PL01] to "_ _ _ 0" to set "Magnetic pole detection disabled". (Note)
Turn "On (up)" the test operation select switch (SW2-1) of the servo amplifier, and then cycle the
power of the servo amplifier.
Set [Pr. PL08 Linear servo motor/DD motor function selection 3] to "_ _ _ 0" to set the magnetic pole
detection method to "Position detection method".
Set [Pr. PL01 Linear servo motor/DD motor function selection 1] to "_ _ _ 1" to set "Magnetic pole
detection always enabled". (Note)
Turn the servo amplifier power off and on again.
The magnetic pole detection is carried out.
Is [Pr. PL09] the final value?
Has [AL. 27 Initial magnetic pole
detection error] occurred?
Reset the alarm or turn off the
servo amplifier power, and then
turn on the power again.
Turn the servo amplifier power
off and on again.
Reset the alarm or turn off
the servo amplifier power, and
then turn on the power again.
Increase the value of [Pr. PL09]
by five.
Set an approximately 70% of the
value set for [Pr. PL09] as the
final setting value.
If [AL. 27 Initial magnetic pole
detection error] occurs with this
value, specify a value
intermediate between the value
set at [AL. E1 Overload warning
1] and the value set at [AL. 27
Initial magnetic pole detection
error] as the final setting value.
NO
YES
YES
NO
YES
NO
Magnetic pole detection
End
2)
3)
4)
5)
6)
7)
8)
Note. For the incremental s
y
stem, the [Pr. PL01] settin
g
is not required.
15. USING A DIRECT DRIVE MOTOR
15 - 8
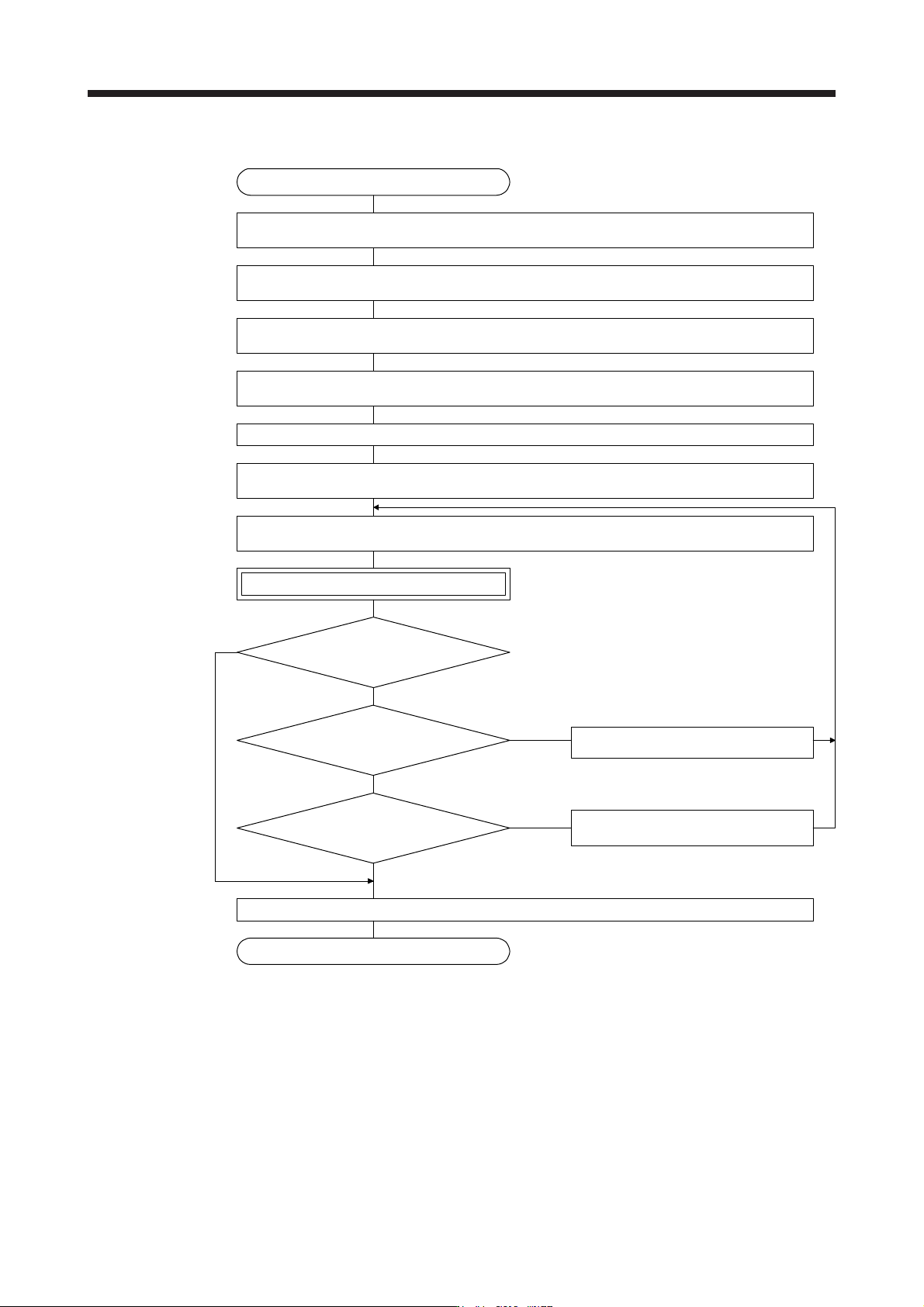
(b) Magnetic pole detection by the minute position detection method
Is the travel distance
during the magnetic pole
detection acceptable?
(Note 3)
Turn the servo amplifier power off and on again.
Execute "Forward CCW rotation" or "Reverse rotation" with "Positioning CW operation" in the test
operation mode on MR Configurator2. Set the travel distance to "0" at this time.
Set [Pr. PL08 Linear servo motor/DD motor function selection 3] to "_ _ _ 4" to set the magnetic pole
detection method to "Minute position detection method".
The magnetic pole detection is carried out.
Is "Response selection"
of [Pr. PL17] set to a
final setting value?
Has an abnormal sound or
vibration occurred during the
magnetic pole detection?
Decrease the value set in "Response
selection" of [Pr. PL17] by two.
Increase the value set in "Response
selection" of [Pr. PL17] by one.
Not
acceptable
YES
Acceptable
NO
YES
NO
Magnetic pole detection
End
Set [Pr. PL01] to "_ _ _ 0" to set "Magnetic pole detection disabled". (Note 1)
Check that FLS (Upper stroke limit), RLS (Lower stroke limit), and EM2 (Forced stop 2) are on, and
turn the servo amplifier power off and on again.
Turn "On (up)" the test operation select switch (SW2-1) of the servo amplifier, and then cycle the
power of the servo amplifier.
Set [Pr. PL01 Linear servo motor/DD motor function selection 1] to "_ _ _ 1" to set "Magnetic pole
detection always enabled". (Note 1)
Set the load inertia moment ratio of the direct drive motor with [Pr. PL17 Magnetic pole detection -
Minute position detection method - Function selection]. (Note 2)
1)
2)
3)
4)
5)
6)
7)
8)
Note 1. For the incremental s
y
stem, the [Pr. PL01] settin
g
is not required.
2. If the load to direct drive motor inertia ratio is unknown, perform the magnetic pole detection by the
position detection method, and then perform the auto tunin
g
to set an estimated value.
3. For the magnetic pole detection by the minute position detection method, the maximum rotation angle at
the magnetic pole detection must be five degrees or less. To shorten the travel distance, increase the
value of "Response selection" in [Pr. PL17].
15. USING A DIRECT DRIVE MOTOR
15 - 9
(c) State transition of the servo amplifier display (3-digit, 7-segment LED) at the magnetic pole detection
When the magnetic pole detection with MR Configurator2 is normally executed, the servo amplifier
display (3-digit, 7-segment LED) shows the state as below.
The decimal point blinks.
Servo-off status
During the
magnetic
pole detection
Magnetic pole
detection
completed
(Servo-on status)
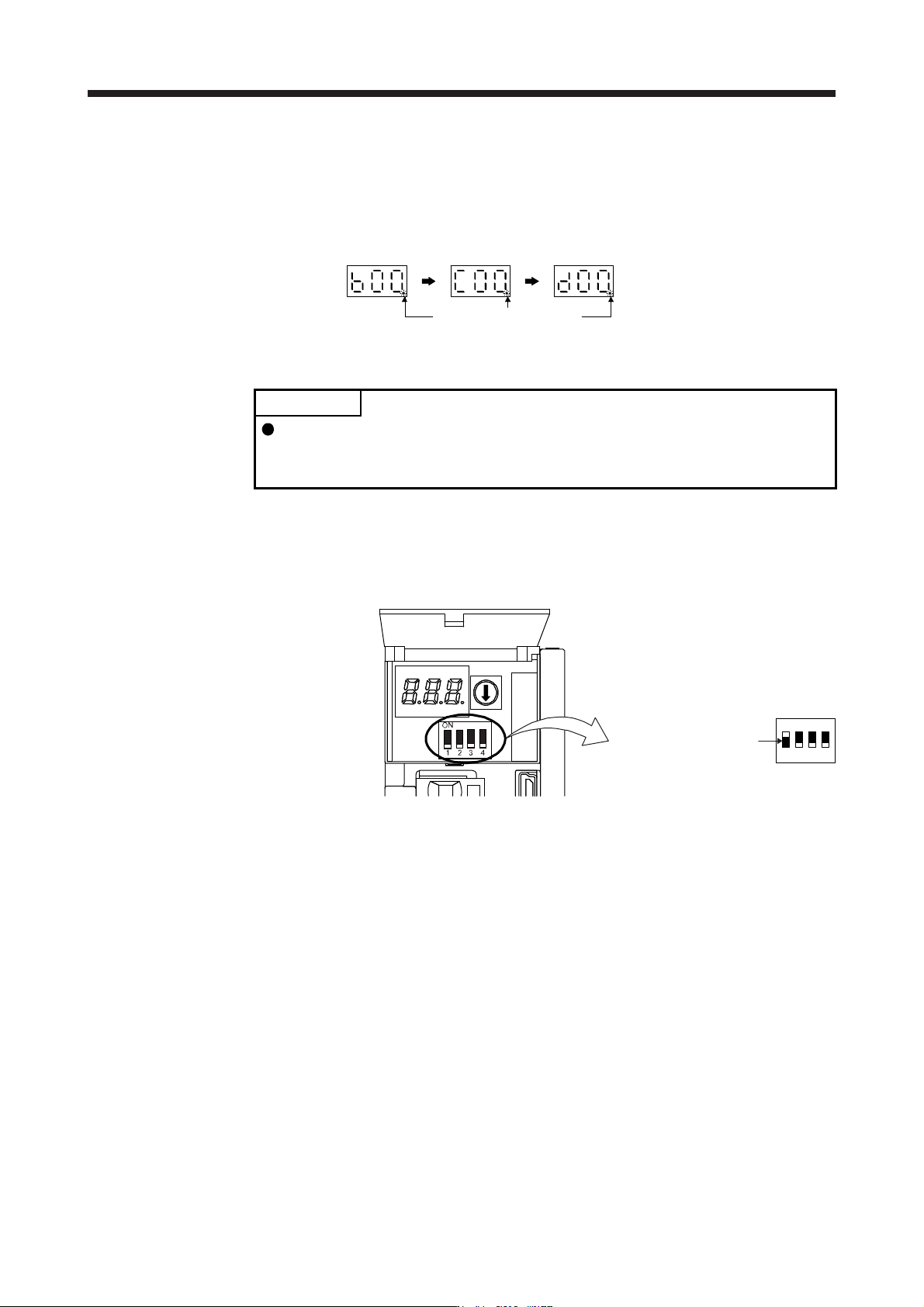
(2) Preparation for the magnetic pole detection
POINT
When the test operation mode is selected with the test operation select switch
(SW2-1), the SSCNET III/H communication for the servo amplifier in the test
operation mode and the following servo amplifiers is blocked.
For the magnetic pole detection, use the test operation mode (positioning operation) of MR
Configurator2. Turn off the servo amplifier power, and set the test operation select switch (SW2-1) and
the disabling control axis switch (SW2-2, SW2-3, and SW2-4) as shown below. Turning on the power
enables the test operation mode.
Set SW2-1 to "ON (up)".
1
ON
2 3 4