sh030106u.pdf - 第519页
15. USIN G A DI REC T DRIV E MOTOR 15 - 16 (b) Speed deviation e rror detection Set [Pr. PL04] to " _ _ _ 2" t o enabl e the spe ed deviat ion error det ectio n. [Pr. PL04] Speed deviation error detection enabl…
15. USING A DIRECT DRIVE MOTOR
15 - 15
15.3.4 Function
(1) Servo control error detection function
POINT
For the servo control error detection function, the position and speed deviation
error detections are enabled by default. ([Pr. PL04]: _ _ _ 3)
If the servo control gets unstable for some reasons, the direct drive motor may not operate properly. To
detect this state and to stop operation, the servo control error detection function is used as a protective
function.
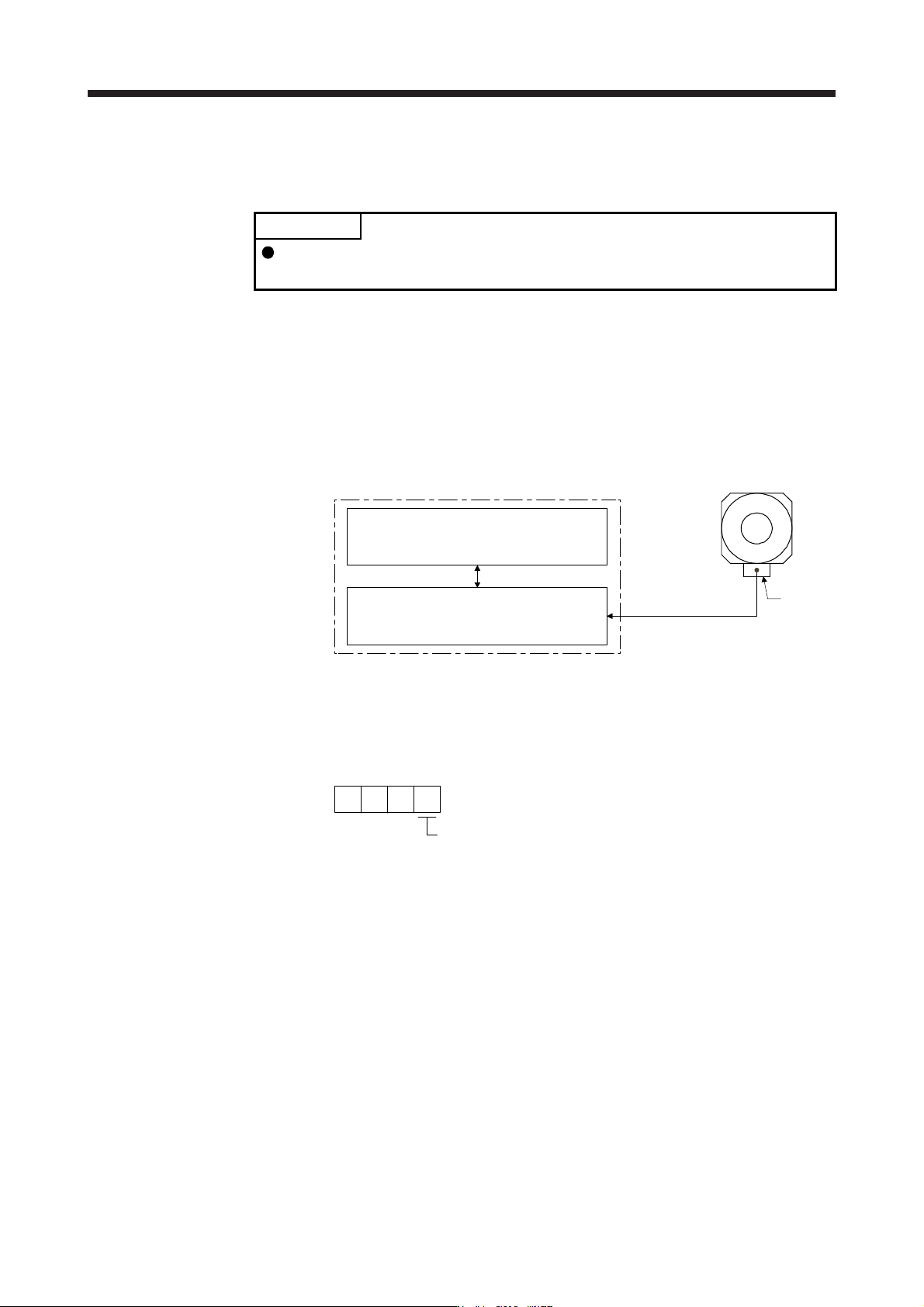
The servo control error detection function has three different detection methods: the position deviation,
speed deviation, and torque deviation. An error is detected when each method is enabled with [Pr. PL04
Linear servo motor/DD motor function selection 2]. The detection level can be changed with [Pr. PL05],
[Pr. PL06], and [Pr. PL07].
Servo amplifier internal value
1)
Model feedback position [rev]
3)
Model feedback speed [r/min]
5)
Command torque [%]
Encoder
2)
Feedback position [rev]
4)
Feedback speed [r/min]
6)
Feedback torque [%]
Servo amplifier
Direct drive motor
Encoder
Figure 15.1 Outline of servo control error detection function
(a) Position deviation error detection
Set [Pr. PL04] to "_ _ _ 1" to enable the position deviation error detection.
[Pr. PL04]
Position deviation error detection enabled
1
When you compare the model feedback position ( 1)) and the feedback position ( 2)) in figure 15.1, if
the deviation is more than the value of [Pr. PL05 Position deviation error detection level] (1 (0.01 rev)
to 1000 (10 rev)), [AL. 42.1 Servo control error by position deviation] will occur and the linear servo
motor will stop. The initial value of this detection level is 0.09 rev. Replace the set value as required.
15. USING A DIRECT DRIVE MOTOR
15 - 16
(b) Speed deviation error detection
Set [Pr. PL04] to "_ _ _ 2" to enable the speed deviation error detection.
[Pr. PL04]
Speed deviation error detection enable
d
2
When you compare the model feedback speed ( 3)) and the feedback speed ( 4)) in figure 15.1, if the
deviation is more than the value of [Pr. PL06 Speed deviation error detection level] (1 r/min to 2000
r/min), [AL. 42.2 Servo control error by speed deviation] will occur and the linear servo motor will
stop. The initial value of this detection level is 100 r/min. Replace the set value as required.
(c) Torque deviation error detection level
Set [Pr. PL04] to "_ _ _ 4" to enable the torque deviation error detection.
[Pr. PL04]
Torque deviation error detection enabled
4
When you compare the command torque ( 5)) and the feedback torque ( 6)) in figure 15.1, if the
deviation is more than the value of [Pr. PL07 Torque/thrust deviation error detection level] (1% to
1000%), [AL. 42.3 Servo control error by torque/thrust deviation] will occur and the linear servo motor
will stop. The initial value of this detection level is 100%. Replace the set value as required.
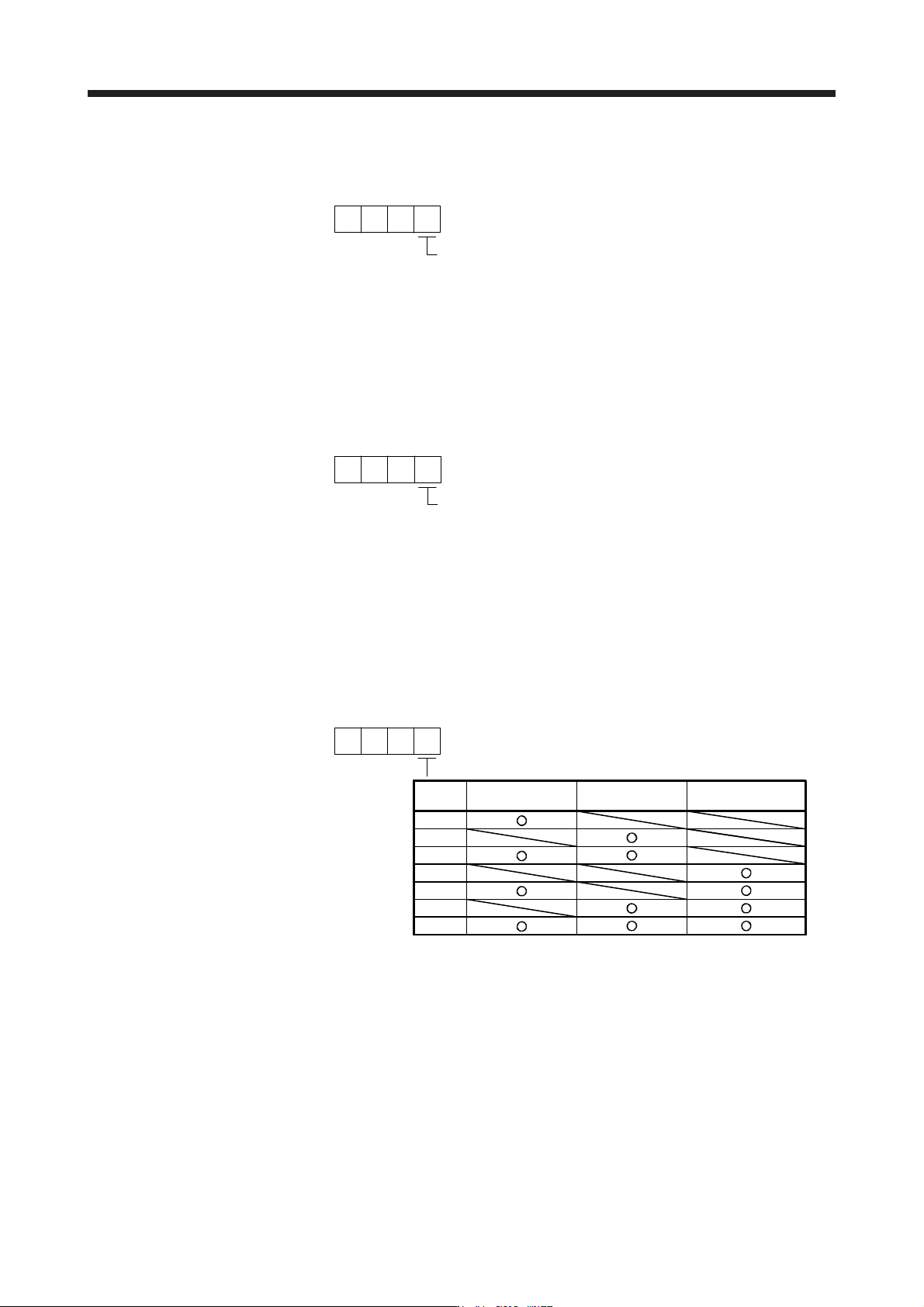
(d) Detecting multiple deviation errors
When setting [Pr. PL04] as shown below, multiple deviation errors can be detected. For the error
detection methods, refer to (1) (a), (b), (c) in this section.
[Pr. PL04]
Position deviation
error detection
Setting
value
Speed deviation
error detection
Torque deviation
error detection
1
5
6
7
3
2
4

15. USING A DIRECT DRIVE MOTOR
15 - 17
15.4 Characteristics
15.4.1 Overload protection characteristics
An electronic thermal is built in the servo amplifier to protect the servo amplifier, direct drive motor, and direct
drive motor power wires from overloads.
[AL. 50 Overload 1] occurs if overload operation performed is above the electronic thermal relay protection
curve shown in Fig. 15.2 [AL. 51 Overload 2] occurs if the maximum current is applied continuously for
several seconds due to machine collision, etc. Use the equipment on the left-side area of the continuous or
broken line in the graph.
When unbalanced torque is generated, such as in a vertical lift machine, the unbalanced torque of the
machine should be kept at 70% or lower of the motor's rated torque.
This servo amplifier has solid-state direct drive motor overload protection for each axis. (The direct drive
motor overload current (full load current) is set on the basis of 120% rated current of the servo amplifier.)