sh030106u.pdf - 第522页
15. USIN G A DI REC T DRIV E MOTOR 15 - 19 15.4.2 Power supply ca pacity and gener ated loss Table 15. 1 ind icates s ervo amplif iers' pow er supp ly ca pacit ies an d loss es gener ated under rated load. For therm…
15. USING A DIRECT DRIVE MOTOR
15 - 18
1000
100
10
1
0.1
0 50 150 200 250 300
100
Servo-lock
Operation time [s]
(Note) Load ratio [%]
Operating
TM-RFM002C20/TM-RFM004C20/
TM-RFM006C20/TM-RFM006E20/
TM-RFM012E20/TM-RFM018E20/
TM-RFM012G20/TM-RFM040J10
1000
100
10
1
0.1
0 50 150 200 250 300100
Servo-lock
Operation time [s]
(Note) Load ratio [%]
Operating
TM-RFM120J10
10000
1000
100
10
1
0 50 150 200 250 300100
Servo-lock
Operation time [s]
(Note) Load ratio [%]
Operating
TM-RFM048G20/TM-RFM072G20/
TM-RFM240J10
0 50 100 150 200 250 300 350
1000
100
10
1
0.1
Operation time [s]
Servo-lock
(Note) Load ratio [%]
Operating
TM-RG2M002C30/TM-RU2M002C30/
TM-RG2M004E30/TM-RU2M004E30/
TM-RG2M009G30/TM-RU2M009G30
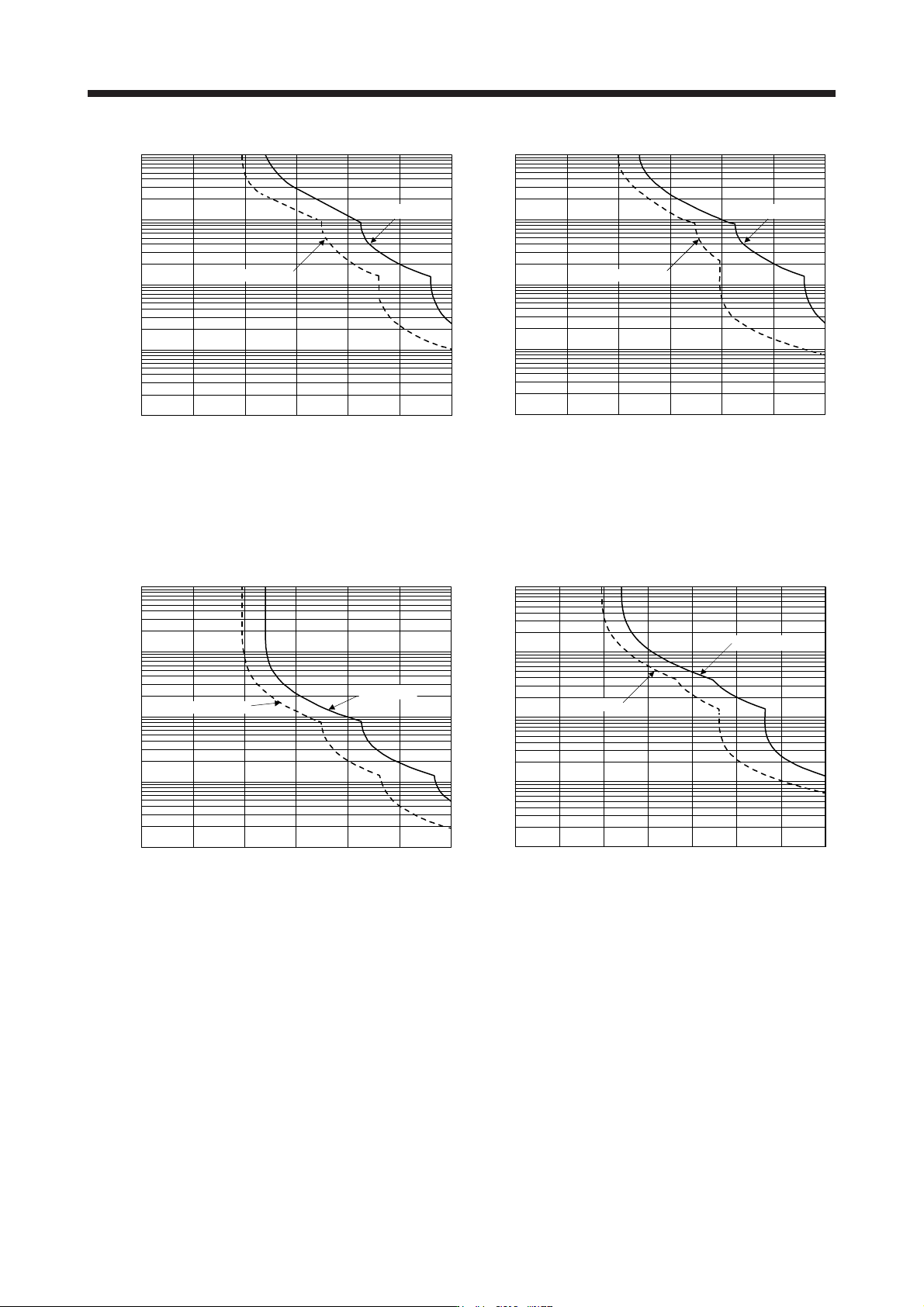
Note. If operation that generates torque more than 100% of the rating is performed with an abnormally high frequency in a direct drive
motor stop status (servo-lock status) or in a 50 r/min or less low-speed operation status, the servo amplifier may malfunction
re
g
ardless of the electronic thermal rela
y
protection.
Fig. 15.2 Electronic thermal relay protection characteristics
15. USING A DIRECT DRIVE MOTOR
15 - 19
15.4.2 Power supply capacity and generated loss
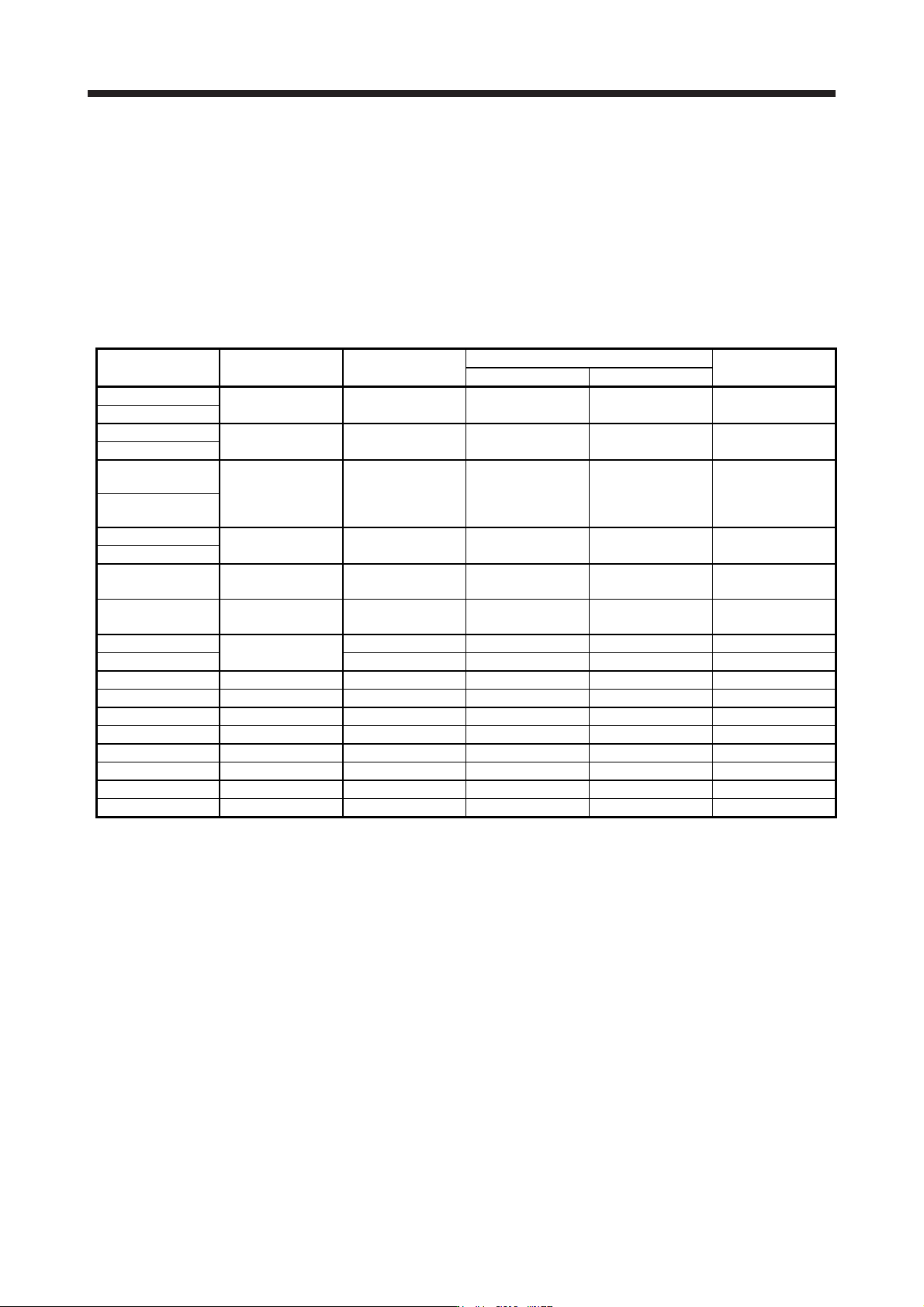
Table 15.1 indicates servo amplifiers' power supply capacities and losses generated under rated load. For
thermal design of an enclosed type cabinet, use the values in the tables in consideration for the harshest
conditions with regard to the environment and operation pattern. The actual amount of generated heat will be
intermediate between values at rated torque and servo-off according to the duty used during operation.
When the direct drive motor is run at less than the rated speed, the power supply capacity will be smaller
than the value in the table, but the servo amplifier's generated heat will not change.
Table 15.1 Power supply capacity and generated loss per direct drive motor
Direct drive motor Servo amplifier
Power supply
capacity [kVA]
Servo amplifier-generated heat [W]
Area required for
heat dissipation [m
2
]
At rated output With servo-off
TM-RG2M002C30
MR-J4-20B(-RJ)
MR-J4-20B1(-RJ)
0.25 25 15 0.5
TM-RU2M002C30
TM-RG2M004E30
MR-J4-20B(-RJ)
MR-J4-20B1(-RJ)
0.5 25 15 0.5
TM-RU2M004E30
TM-RG2M004E30
(Note)
MR-J4-40B(-RJ)
MR-J4-40B1(-RJ)
0.7 35 15 0.7
TM-RU2M004E30
(Note)
TM-RG2M009G30
MR-J4-40B(-RJ)
MR-J4-40B1(-RJ)
0.9 35 15 0.7
TM-RU2M009G30
TM-RFM002C20
MR-J4-20B(-RJ)
MR-J4-20B1(-RJ)
0.25 25 15 0.5
TM-RFM004C20
MR-J4-40B(-RJ)
MR-J4-40B1(-RJ)
0.38 35 15 0.7
TM-RFM006C20
MR-J4-60B(-RJ)
0.53 40 15 0.8
TM-RFM006E20 0.46 40 15 0.8
TM-RFM012E20 MR-J4-70B(-RJ) 0.81 50 15 1.0
TM-RFM018E20 MR-J4-100B(-RJ) 1.3 50 15 1.0
TM-RFM012G20 MR-J4-70B(-RJ) 0.71 50 15 1.0
TM-RFM048G20 MR-J4-350B(-RJ) 2.7 90 20 1.8
TM-RFM072G20 MR-J4-350B(-RJ) 3.8 110 20 2.2
TM-RFM040J10 MR-J4-70B(-RJ) 1.2 50 15 1.0
TM-RFM120J10 MR-J4-350B(-RJ) 3.4 90 20 1.8
TM-RFM240J10 MR-J4-500B(-RJ) 6.6 160 25 3.2
Note. This combination increases the rated torque and the maximum torque.
15. USING A DIRECT DRIVE MOTOR
15 - 20
15.4.3 Dynamic brake characteristics
CAUTION
The coasting distance is a theoretically calculated value that does not consider
factors such as friction. The calculated distance is longer than the actual distance.
If the braking distance is not longer than the calculated value, a moving part may
crash into the stroke end, causing a dangerous situation. Install an anti-crash
mechanism such as an air brake or an electric/mechanical stopper such as a
shock absorber to reduce the shock of moving parts.
POINT
Do not use dynamic brake to stop in a normal operation as it is the function to
stop in emergency.
For a machine operating at the recommended load to motor inertia ratio or less,
the estimated number of usage times of the dynamic brake is 1000 times while
the machine decelerates from the rated speed to a stop once in 10 minutes.
Be sure to enable EM1 (Forced stop 1) after the direct drive motor stops when
using EM1 (Forced stop 1) frequently in other than emergency.
(1) Dynamic brake operation
(a) Calculation of coasting distance
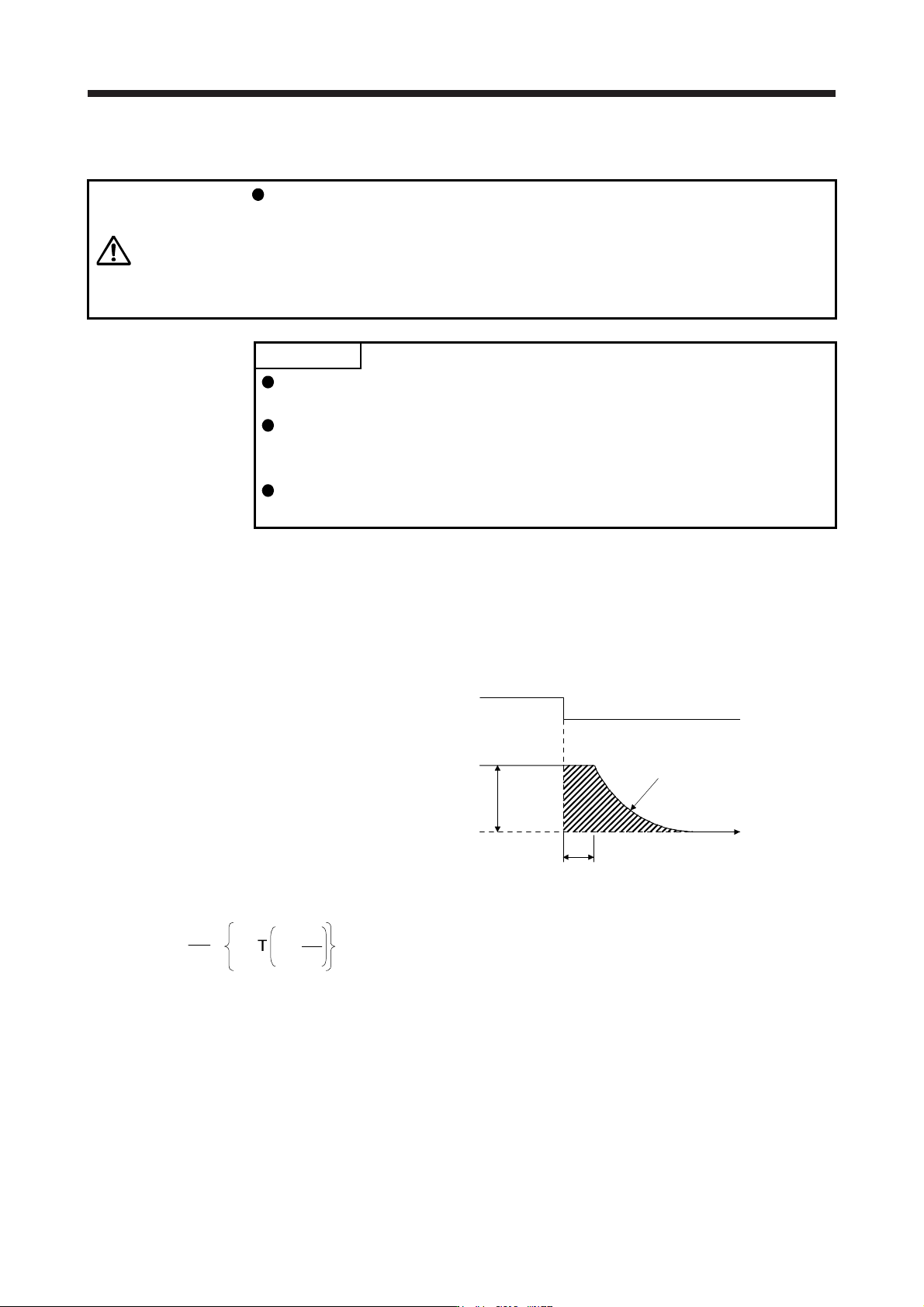
Fig. 15.3 shows the pattern in which the servo motor comes to a stop when the dynamic brake is
operated. Use equation 15.1 to calculate an approximate coasting distance to a stop. The dynamic
brake time constant τ varies with the direct drive motor and machine operation speeds. (Refer to (1)
(b) in this section.)
Dynamic brake
time constant τ
Time
t
e
V0
ON
OFF
EM1 (Forced stop 1)
Machine
speed
Fig. 15.3 Dynamic brake operation diagram
L
max
=
60
V
0
•
J
M
t
e
+1 +
J
L
······················································································ (15.1)
L
max
: Maximum coasting distance [mm]
V
0
: Machine's fast feed speed [mm/min]
J
M
: Moment of inertia of direct drive motor [kg•cm
2
]
J
L
: Load moment of inertia converted into equivalent value on direct drive motor rotor [kg•cm
2
]
τ: Dynamic brake time constant [s]
t
e
: Delay time of control section
There is internal relay delay time of about 10 ms.
[s]