sh030106u.pdf - 第526页
16. FULLY CLOSE D L OOP SYS TEM 16 - 1 16. FULLY CLOSED LOOP SYSTEM POINT The f ully clo sed lo op syste m is a vailab le for th e servo ampli fi ers of which software ver sion is A3 or later . When full y closed l oop c…
15. USING A DIRECT DRIVE MOTOR
15 - 22
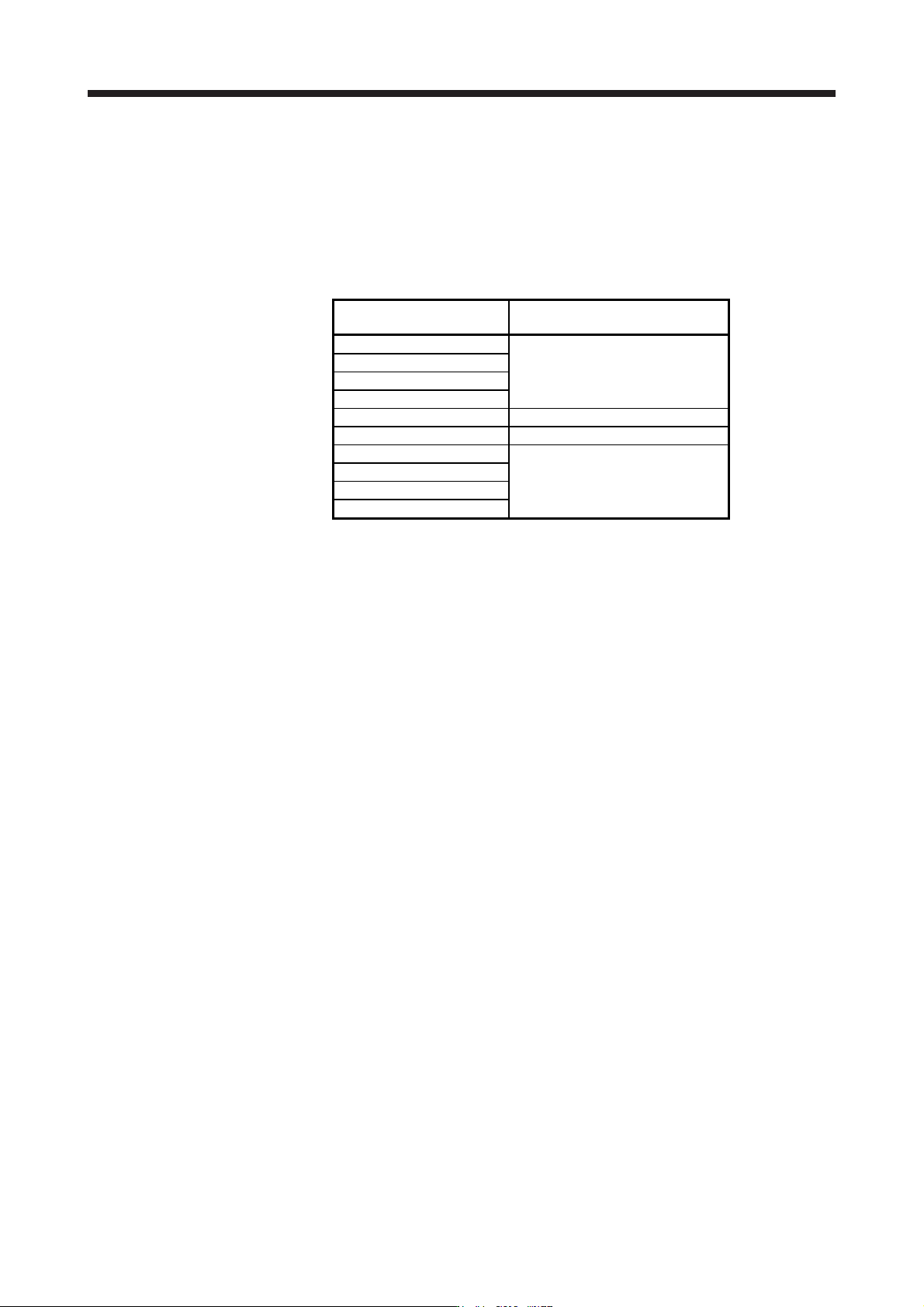
(2) Permissible load to motor inertia ratio when the dynamic brake is used
Use the dynamic brake under the load to motor inertia ratio indicated in the following table. If the load
inertia moment is higher than this value, the dynamic brake may burn. If the load to motor inertia ratio
exceeds the indicated value, contact your local sales office.
The values of the permissible load to motor inertia ratio in the table are the values at the maximum
rotation speed of the direct drive motor.
The value in the parenthesis shows the value at the rated speed of the direct drive motor.
Direct drive motor
Permissible load to motor inertia ratio
[multiplier]
TM-RFM_C20
100 (300)
TM-RFM_E20
TM-RG2M002C30
TM-RU2M002C30
TM-RFM_G20 50 (300)
TM-RFM_J10 50 (200)
TM-RG2M_E30
20 (80)
TM-RG2M_G30
TM-RU2M_E30
TM-RU2M_G30
16. FULLY CLOSED LOOP SYSTEM
16 - 1
16. FULLY CLOSED LOOP SYSTEM
POINT
The fully closed loop system is available for the servo amplifiers of which
software version is A3 or later.
When fully closed loop control system is used with this servo amplifier, "Linear
Encoder Instruction Manual" is needed.
Fully closed loop control system is available with position control mode.
When fully closed loop control system is configured with MR-J4-_B_ servo
amplifier, the following restrictions apply. However, these restrictions will not be
applied for MR-J4-_B_-RJ servo amplifiers.
A/B/Z-phase differential output type encoder cannot be used.
The load-side encoder and servo motor encoder is compatible with only the
two-wire type. The four-wire type load-side encoder and servo motor encoder
cannot be used.
When you use the KG-KR and HG-MR series for driving and load-side
encoder, the optional four-wire type encoder cables (MR-EKCBL30M-L, MR-
EKCBL30M-H, MR-EKCBL40M-H, and MR-EKCBL50M-H) cannot be used.
When an encoder cable of 30 m to 50 m is needed, fabricate a two-wire type
encoder cable according to app. 8.
The synchronous encoder Q171ENC-W8 can be used with servo amplifiers with
software version A8 or later.
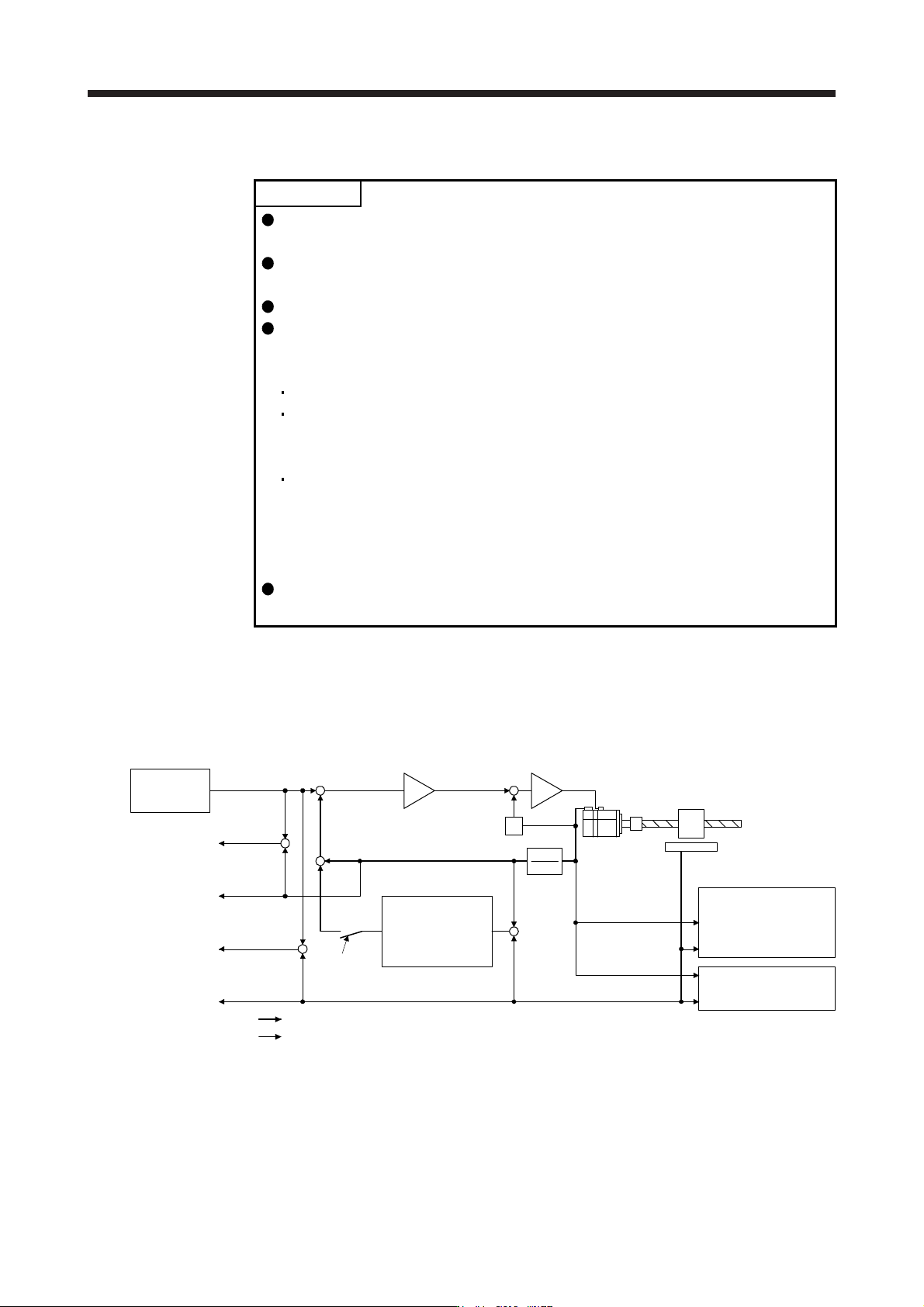
16.1 Functions and configuration
16.1.1 Function block diagram
A fully closed loop control block diagram is shown below. The fully closed loop system is controlled in the
load-side encoder unit.
Servo motor-side cumulative
feedback pulses
(load-side encoder resolution unit)
(Servo motor side)
Droop pulses
(Servo motor side)
Cumulative
feedback pulses
Load-side
droop pulses
Cumulative load-side
feedback pulses
Fully closed loop
dual feedback
filter
([Pr. PE08])
(Note 2)
FBD
Servo motor
Linear encoder
Controller
(Note 1, 2)
Fully closed loop selection
([Pr. PE01] and [Pr. PE08])
+
-
FBN
S
+
-
Encoder pulse setting
([Pr. PA15], [Pr. PA16]
and [Pr. PC03])
Fully closed loop control
error detection function
selection ([Pr. PE03])
+
-
+
+
-
+
-
+
Control
Monitor
Load-side feedback pulses
Note 1. Switching between semi closed loop control and fully closed loop control can be performed by changing the setting of [Pr.
PE01].
When semi closed loop control is selected, a control is always performed on the bases of the position data of the servo
motor encoder independently of whether the servo motor is at a stop or running.
2. When the fully closed loop system is enabled in [Pr. PE01], dual feedback control in which the servo motor feedback signal
and load-side encoder feedback signal are combined by the dual feedback filter in [Pr. PE08] is performed.
In this case, fully closed loop control is performed when the servo motor is at a stop, and semi closed loop control is
performed when the servo motor is operating to improve control performance. When "4500" is set as the filter value of [Pr.
PE08 Dual feedback filter], full
y
closed loop control is alwa
y
s performed.
16. FULLY CLOSED LOOP SYSTEM
16 - 2
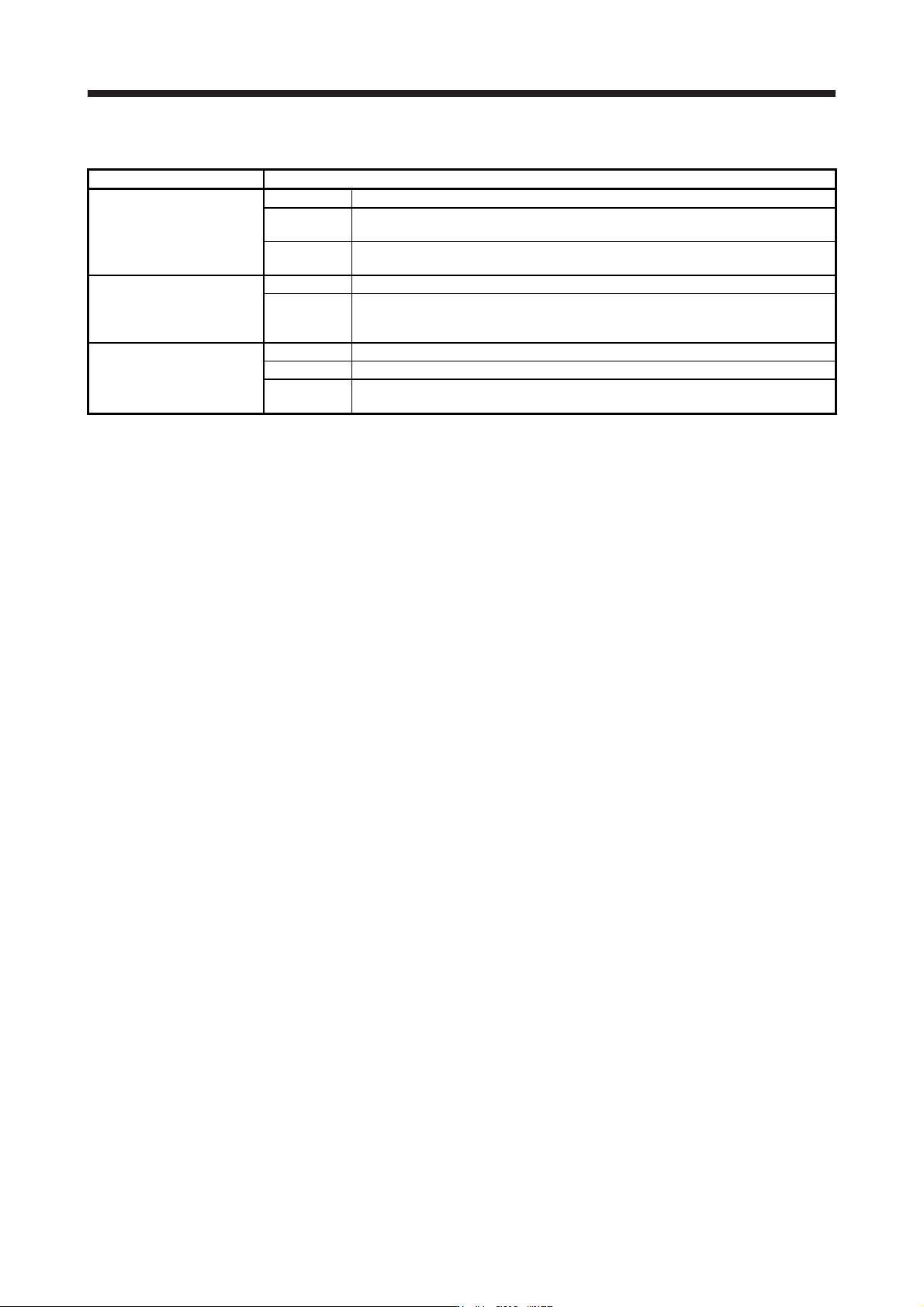
The following table shows the functions of each control mode.
Control Description
Semi closed loop control
Feature Position is controlled according to the servo motor-side data.
Advantage
Since this control is insusceptible to machine influence (such as machine resonance),
the gains of the servo amplifier can be raised and the settling time shortened.
Disadvantage
If the servo motor side is at a stop, the side may be vibrating or the load-side accuracy
not obtained.
Dual feedback control
Feature Position is controlled according to the servo motor-side data and load-side data.
Advantage
Control is performed according to the servo motor-side data during operation, and
according to the load side-data at a stop in sequence to raise the gains during
operation and shorten the settling time. A stop is made with the load-side accuracy.
Fully closed loop control
Feature Position is controlled according to the load-side data.
Advantage The load-side accuracy is obtained not only at a stop but also during operation.
Disadvantage
Since this control is susceptible to machine resonance or other influences, the gains
of the servo amplifier may not rise.