sh030106u.pdf - 第543页
16. FULLY CLOSE D L OOP SYS TEM 16 - 18 (b) Abo ut prox imity dog ty pe home posit ion return us ing increme ntal linear encoder 1) When th e linear encoder home position (refer ence ma rk) exists in the ho me pos ition …
16. FULLY CLOSED LOOP SYSTEM
16 - 17
16.3.2 Home position return
(1) General instruction
Home position return is all performed according to the load-side encoder feedback data, independently
of the load-side encoder type. It is irrelevant to the Z-phase position of the servo motor encoder. In the
case of a home position return using a dog signal, the home position (reference mark) must be passed
through when an incremental type linear encoder is used, or the Z-phase be passed through when a
rotary encoder is used, during a period from a home position return start until the dog signal turns off.
(2) Load-side encoder types and home position return methods
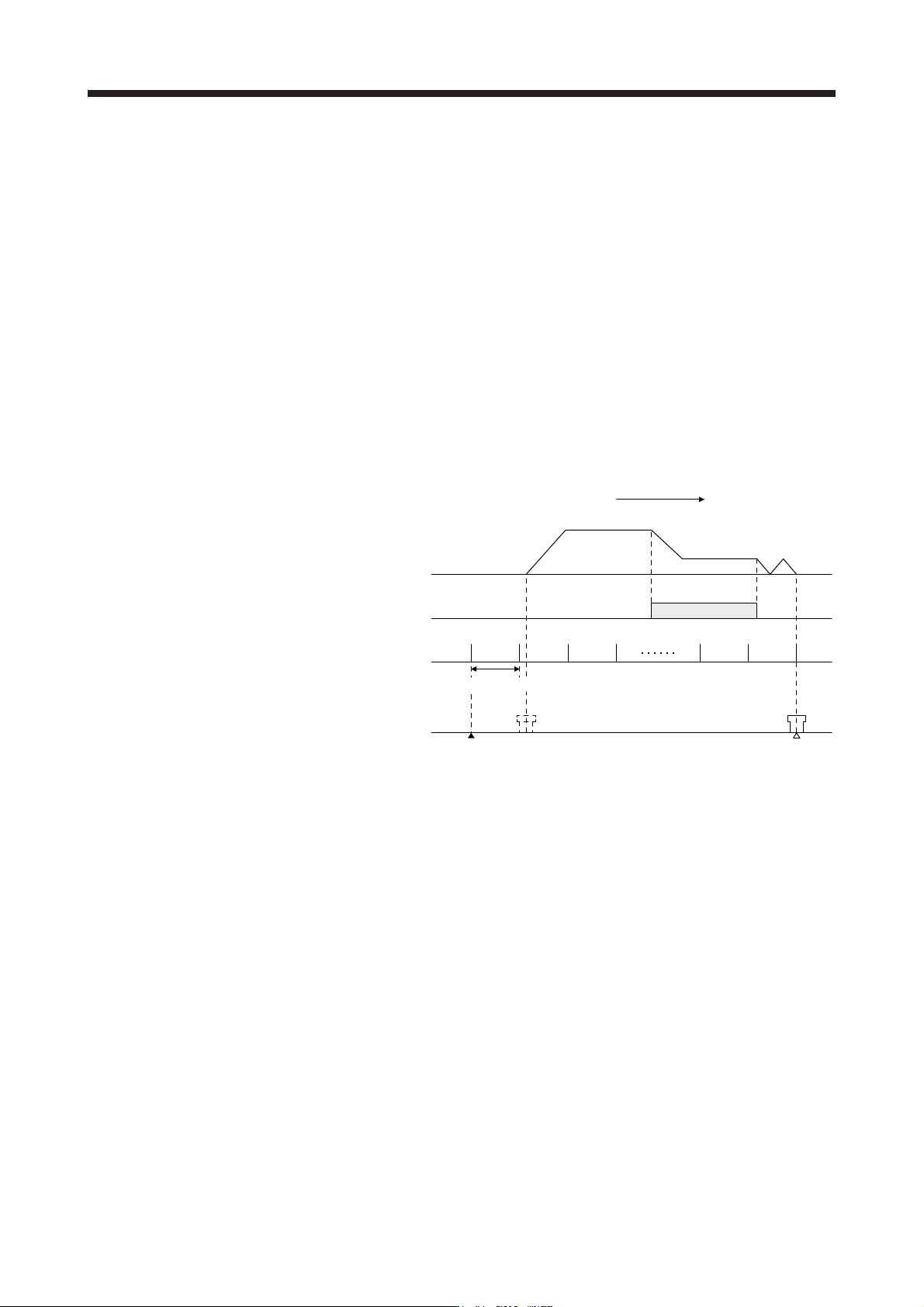
(a) About proximity dog type home position return using absolute type linear encoder
When an absolute type linear encoder is used, the home position reference position is the position
per servo motor revolution to the linear encoder home position (absolute position data = 0).
In the case of a proximity dog type home position return, the nearest position after proximity dog off
is the home position.
The linear encoder home position may be set in any position.
Linear encoder home position Home position
Home position return speed
Creep speed
Home position return direction
ON
OFF
Proximity dog
signal
Servo motor
speed
Reference home
position
Machine position
0 r/min
Equivalent to one servo motor revolution
16. FULLY CLOSED LOOP SYSTEM
16 - 18
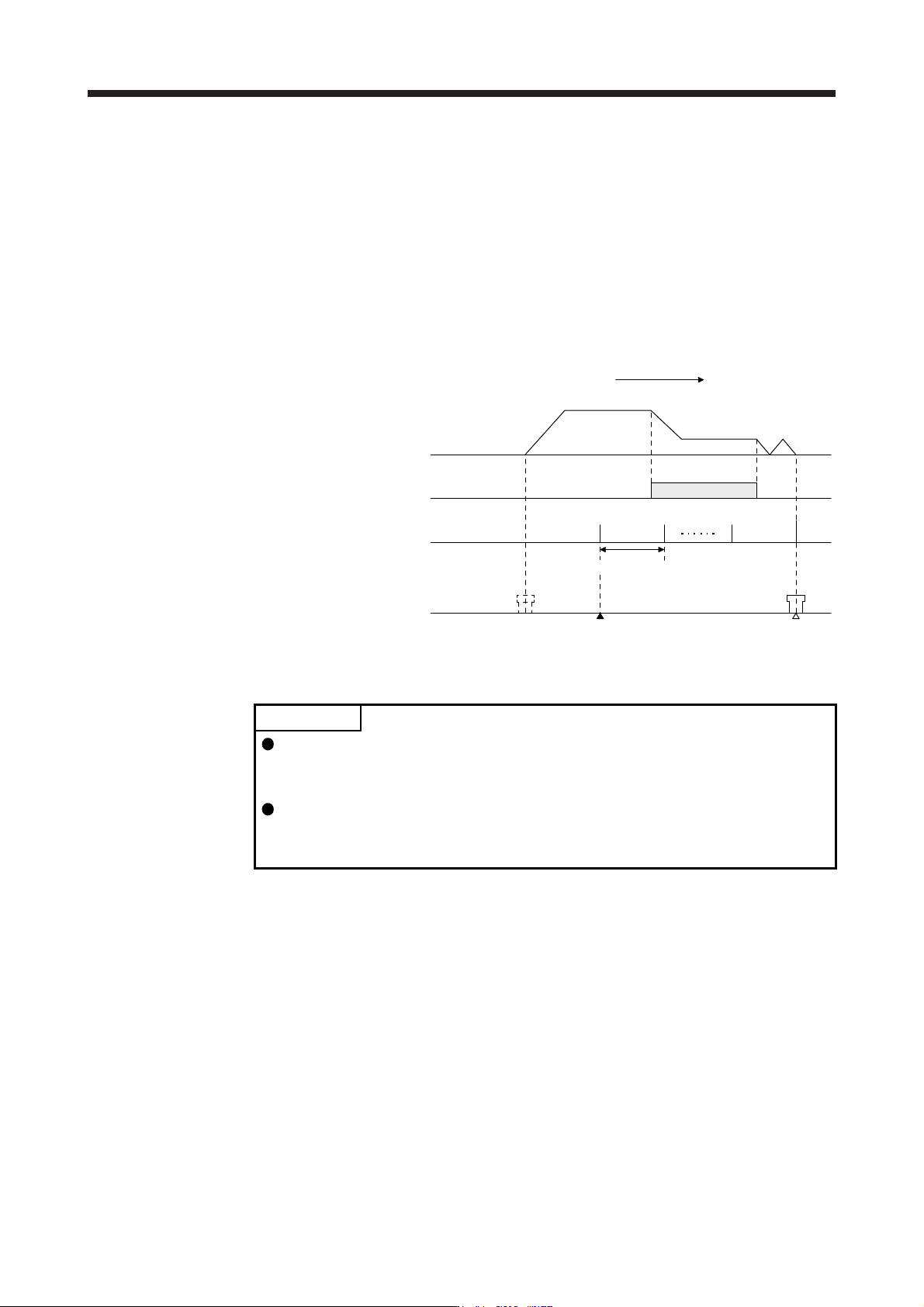
(b) About proximity dog type home position return using incremental linear encoder
1) When the linear encoder home position (reference mark) exists in the home position return
direction
When an incremental linear encoder is used, the home position is the position per servo motor
revolution to the linear encoder home position (reference mark) passed through first after a home
position return start.
In the case of a proximity dog type home position return, the nearest position after proximity dog
off is the home position.
Set one linear encoder home position in the full stroke, and set it in the position that can always
be passed through after a home position return start.
Servo motor
speed
Linear encoder home position Home position
Home position return speed
Creep speed
Home position return direction
ON
OFF
Proximity dog
signal
Reference home
position
Machine position
Equivalent to one servo motor revolution
0 r/min
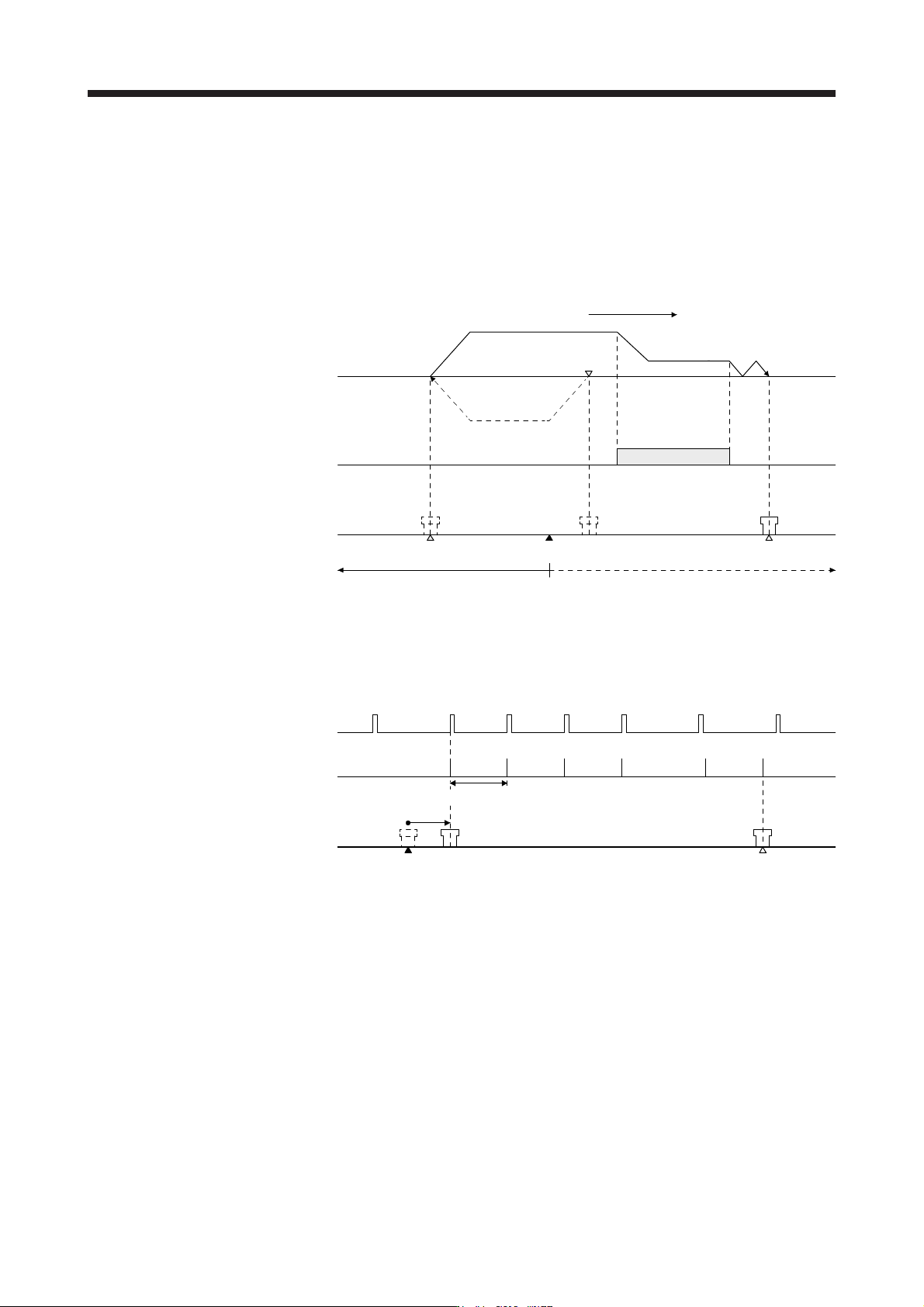
2) When the linear encoder home position does not exist in the home position return direction
POINT
To execute a home position return securely, start a home position return after
moving the axis to the opposite stroke end by jog operation, etc. of the
controller.
A home position return cannot be made if the incremental linear encoder does
not have a linear encoder home position (reference mark). Always provide a
linear encoder home position (reference mark). (one place in the fully stroke)
16. FULLY CLOSED LOOP SYSTEM
16 - 19
If the home position return is performed from the position where the linear encoder home position
(reference mark) does not exist, a home position return error occurs on the controller side. The
error contents differ according to the controller type. When starting a home position return at the
position where the linear encoder home position (reference mark) does not exist in the home
position return direction, move the axis up to the stroke end on the side opposite to the home
position return direction by JOG operation, etc. of the controller once, then make a home position
return.
Stroke end Home position
Home position return speed
Creep speed
Home position return direction
ON
OFF
Proximity dog
signal
Machine position
Linear encoder home position
JOG operation
Home position returnable area Home position non-returnable area
Servo motor
speed
0 r/min
(c) About dog type home position return when using the rotary encoder of a serial communication servo
motor
The home position for when using the rotary encoder of a serial communication servo motor for the
load-side encoder is at the load-side Z-phase position.
Servo amplifier
power-on position
Home position
ON
OFF
Load-side encoder
Z-phase signal
Reference home position
Machine position
Equivalent to one servo motor revolution
(d) About data setting type (Common to all load-side encoders)
In the data setting type home position return method, pass through a home position (reference mark)
and the Z-phase signal of the rotary encoder, and then make a home position return.
When the machine has no distance of one servo motor encoder revolution until the Z-phase of the
rotary encoder is passed through, a home position return can be made by changing the home
position setting condition selection in [Pr. PC17] if the home position is not yet passed through.