sh030106u.pdf - 第546页
16. FULLY CLOSE D L OOP SYS TEM 16 - 21 (a) When us ing a l inear enc oder (unit s etting: mm) Differentiation AP AL Servo motor Linear encoder Position feedback [mm] Command [mm] + - Speed feedback [r/min] AL AP Electro…
16. FULLY CLOSED LOOP SYSTEM
16 - 20
16.3.3 Operation from controller
The fully closed loop control compatible servo amplifier can be used with any of the following controllers.
Category Model Remark
Motion controller R_MTCPU/Q17_DSCPU
Speed control (II) instructions (VVF and VVR) cannot
be used.
Simple motion module
RD77MS_/QD77MS_ /
LD77MS_
An absolute type linear encoder is necessary to configure an absolute position detection system under fully
closed loop control using a linear encoder. In this case, the encoder battery need not be installed to the
servo amplifier. When an rotary encoder is used, an absolute position detection system can be configured by
installing the encoder battery to the servo amplifier. In this case, the battery life will be shorter because the
power consumption is increased as the power is supplied to the two encoders of motor side and load side.
(1) Operation from controller
Positioning operation from the controller is basically performed like the semi closed loop control.
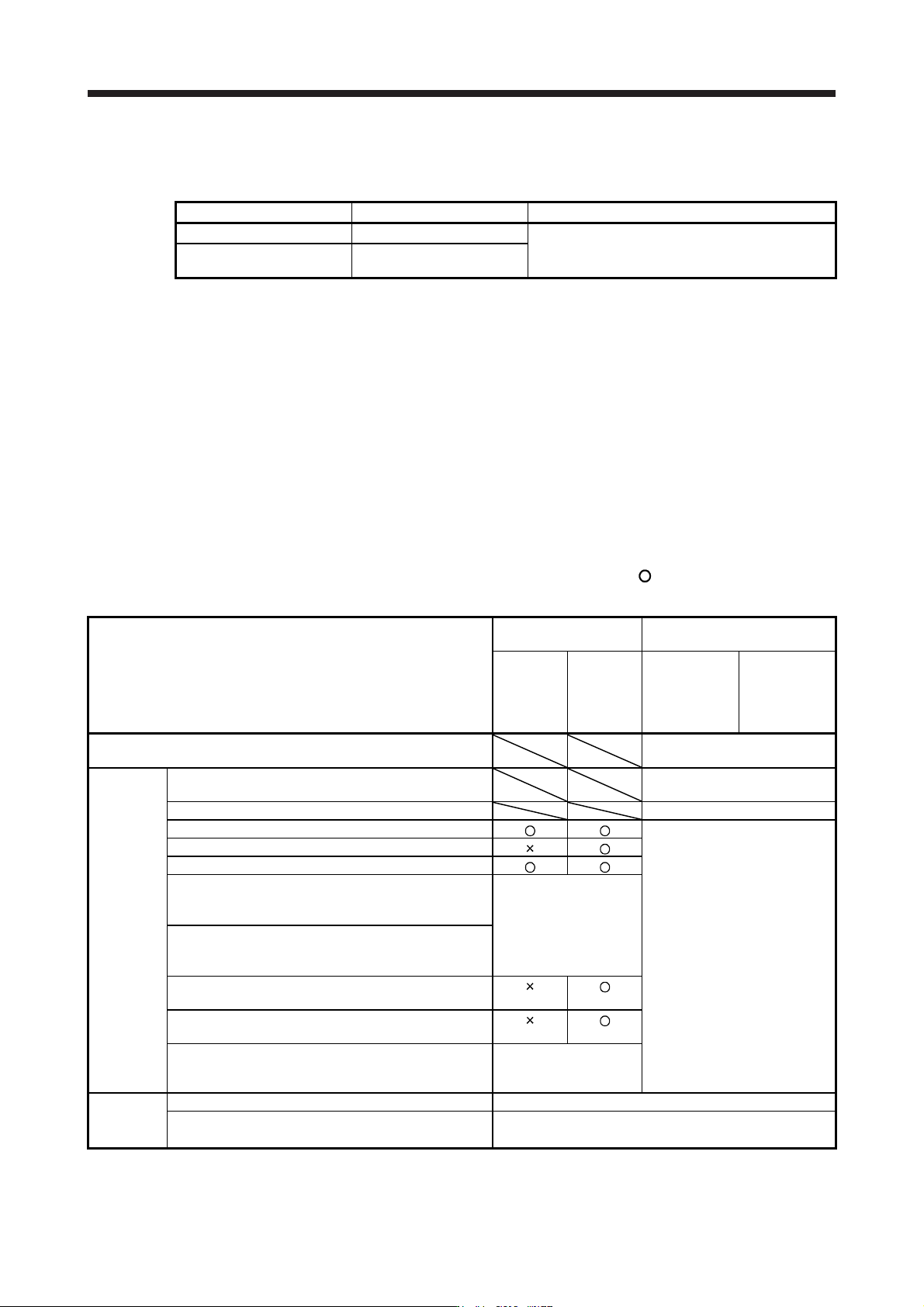
(2) Servo system controller setting
When using fully closed loop system, make the following setting.
[Pr. PA01], [Pr. PC17], [Pr. PE01], [Pr. PE03] to [Pr. PE05], [Pr. PE34] and [Pr. PE35] are written to the
servo amplifier and then are enabled using any of the methods indicated by
in Parameter enabled
conditions. [Pr. PE06] to [Pr. PE08] are enabled at setting regardless of the valid conditions.
Setting item
Parameter enabled
conditions
Settings
Controller
reset
Power
supply
Off→on
Motion
controller
R_MTCPU/
Q17_DSCPU
Simple motion
module
RD77MS_/
QD77MS_ /
LD77MS_
Command
resolution
Load-side encoder resolution
unit
Servo
parameter
MR-J4-B fully closed loop servo amplifier setting
MR-J4-B(-RJ) fully closed loop
control
Motor setting Automatic setting
Home position setting condition selection ([Pr. PC17])
Set the items as required.
Fully closed loop selection ([Pr. PA01] and [Pr. PE01])
Fully closed loop selection 2 ([Pr. PE03])
Fully closed loop control error detection speed deviation
error detection level
([Pr. PE06])
Enabled at setting
regardless of the
enabled conditions
Fully closed loop control error detection position
deviation error detection level
([Pr. PE07])
Fully closed loop electronic gear numerator ([Pr. PE04]
and [Pr. PE34])
Fully closed loop electronic gear denominator ([Pr. PE05]
and [Pr. PE35])
Fully closed loop dual feedback filter ([Pr. PE08])
Enabled at setting
regardless of the
enabled conditions
Positioning
control
parameter
Unit setting mm/inch/degree/pulse
Number of pulses per revolution (AP)
Travel distance per revolution (AL)
For the setting methods, refer to (2) (a), (b) in this section.
16. FULLY CLOSED LOOP SYSTEM
16 - 21
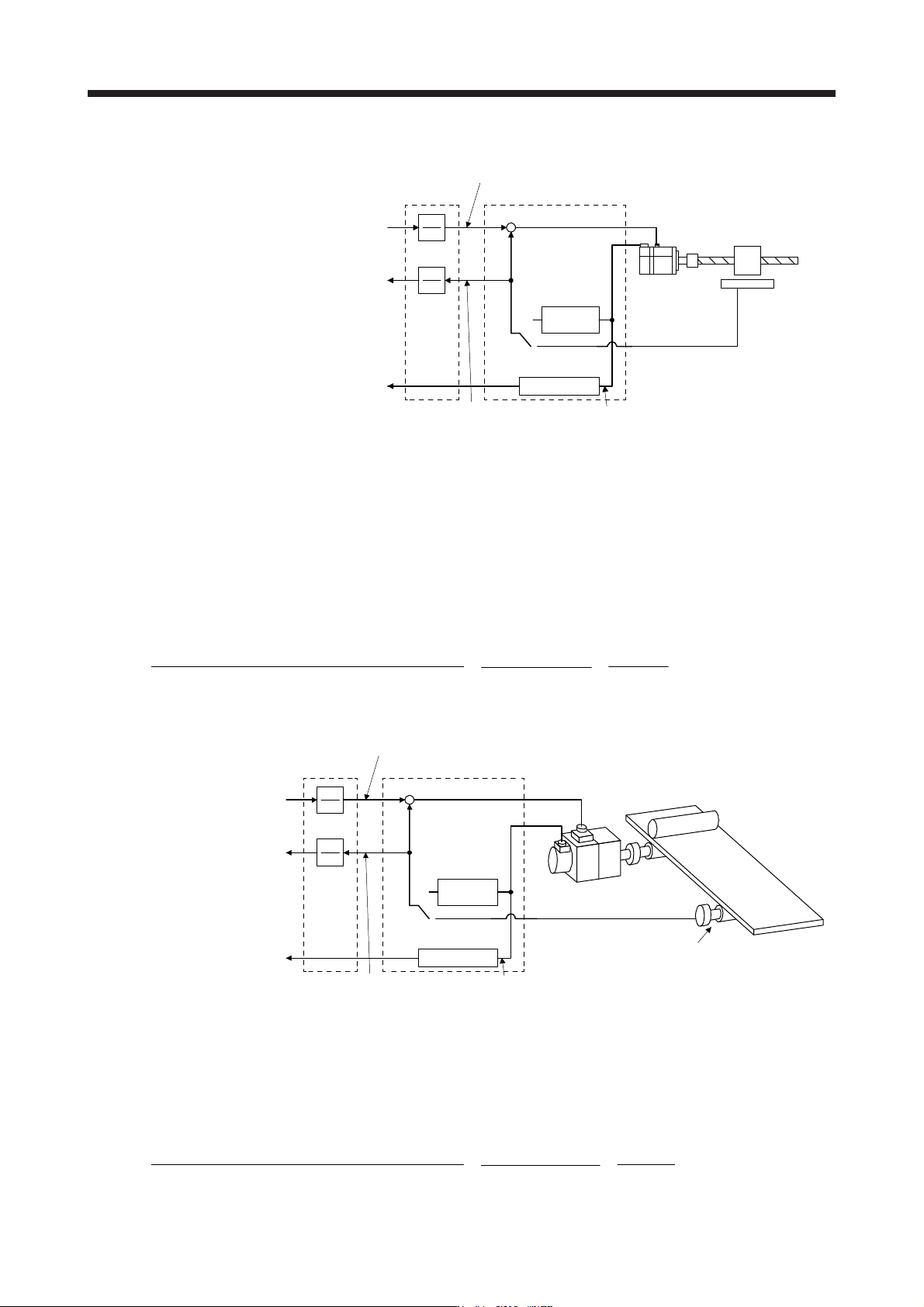
(a) When using a linear encoder (unit setting: mm)
Differentiation
AP
AL
Servo motor Linear encoder
Position feedback
[mm]
Command
[mm]
+
-
Speed feedback
[r/min]
AL
AP
Electronic
gear
User Control
Servo amplifier
Load-side encoder resolution unit
Load-side encoder
resolution unit
Servo motor speed
Calculate the number of pulses (AP) and travel distance (AL) of the linear encoder per ball screw
revolution in the following conditions.
Ball screw lead: 20 mm
Linear encoder resolution: 0.05 µm
Number of linear encoder pulses (AP) per ball screw revolution
= Ball screw lead/linear encoder resolution = 20 mm/0.05 µm = 400000 pulses
Number of pulses per revolution [pulse] (AP)
Travel distance per revolution [µm] (AL)
=
400000 pulses
20 mm
=
400000
20000
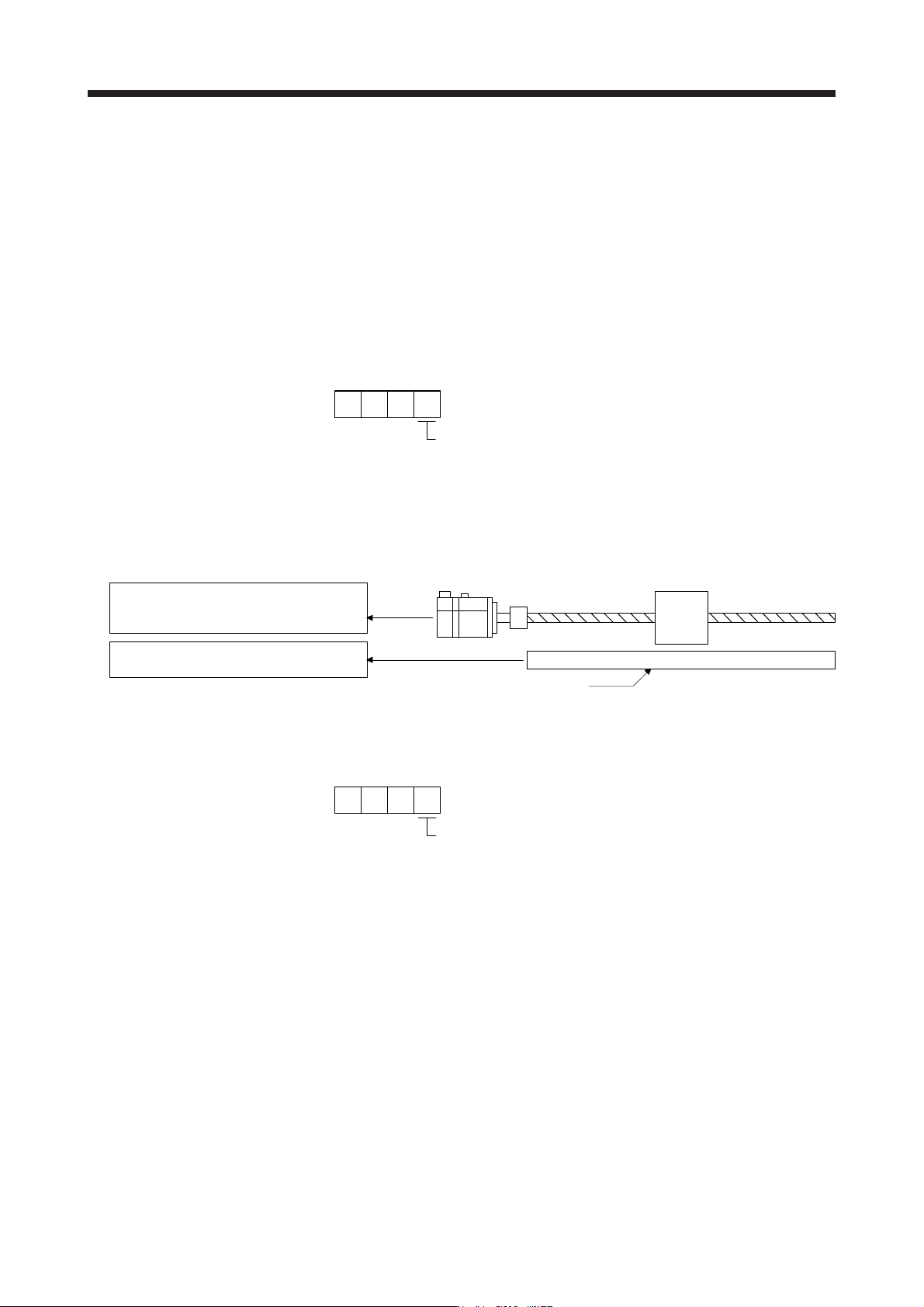
(b) When using a rotary encoder (unit setting: degree)
Servo motor
Rotary encoder
(HG-KR or HG-MR servo motor)
4194304 pulses/rev
AP
AL
Position feedback
[degree]
Command
[degree]
+
-
Speed feedback
[r/min]
AL
AP
Electronic
gear
User Control Servo amplifier
Load-side encoder resolution unit
Load-side encoder
resolution unit
Servo motor speed
Differentiation
Calculate the number of pulses (AP) and travel distance (AL) of the rotary encoder per servo motor
revolution in the following conditions.
Resolution of rotary encoder = Load-side resolution: 4194304 pulses/rev
Number of pulses per revolution [pulse] (AP)
Travel distance per revolution [degree] (AL)
=
4194304 pulses
360 degrees
=
524288
45
16. FULLY CLOSED LOOP SYSTEM
16 - 22
16.3.4 Fully closed loop control error detection functions
If fully closed loop control becomes unstable for some reason, the speed at servo motor side may increase
abnormally. The fully closed loop control error detection function is a protective function designed to pre-
detect it and stop operation.
The fully closed loop control error detection function has two types of detection methods: speed deviation
and position deviation. Select a detection method with [Pr. PE03 Fully closed loop function selection 2].
The detection level setting can be changed using [Pr. PE06] and [Pr. PE07].
(1) Parameter
The fully closed loop control error detection function is selected.
Fully closed loop control error detection function
0: Disabled
1: Speed deviation error detection
2: Position deviation error detection
3: Speed deviation error, position deviation error detectio
n
(Initial value)
[Pr. PE03]
(2) Fully closed loop control error detection functions
Servo motor
Linear encoder
1) Servo motor-side feedback speed [r/min]
2) Servo motor-side feedback position [pulse]
(load side equivalent value)
3) Load-side feedback speed [r/min]
4) Load-side feedback position [pulse]
(a) Speed deviation error detection
Set [Pr. PE03] to "_ _ _ 1" to enable the speed deviation error detection.
Speed deviation error detectio
n
1
[Pr. PE03]
The function compares the servo motor-side feedback speed (1)) and load-side feedback speed (3)).
If the deviation is not less than the set value (1 r/min to the permissible speed) of [Pr. PE06 Fully
closed loop control speed deviation error detection level], the function generates [AL. 42.2 Servo
control error by speed deviation] and stops. The initial value of [Pr. PE06] is 400 r/min. Change the
set value as required.