sh030106u.pdf - 第620页
17. APPLICATIO N OF FUNCTIONS 17 - 69 (1) Summary The mast er-slav e operat ion functi on trans mits a m aster axis tor qu e to slav e axes using driver communic ation an d the tor que as a comman d drives s lave ax es b…
17. APPLICATION OF FUNCTIONS
17 - 68
17.2 Master-slave operation function
WARNING
Configure the circuit so that all the master and slave axes for the same machine
are stopped by the controller forced stop at the moment of a stop of a master or
slave axis due to such as a servo alarm. When they are not stopped
simultaneously by the controller forced stop, the servo motor may operate
unexpectedly and the machine can be damaged.
All the master and slave axes for the same machine should turn on/off EM1
(Forced stop 1) simultaneously. When EM1 (Forced stop 1) is not turned on/off
simultaneously, the servo motor may operate unexpectedly and the machine can
be damaged.
POINT
The master-slave operation function works only when the forced stop
deceleration function is disabled. When the forced stop deceleration function is
enabled, [AL. 37] will occur.
The master-slave operation function cannot be used with the continuous
operation to torque control.
Use the master-slave operation function with the following controllers. Refer to
the manuals for each servo system controller for compatible software versions,
and other details.
RD77MS/QD77MS_/LD77MS_
R_MTCPU/Q17_DSCPU
Q170MSCPU
When the function is used in vertical axis system, set the same value to the
parameters regarding the dynamic brake and electromagnetic brake to prevent a
drop of axes.
The servo-on command of the master axis and slave axis should be turned
on/off simultaneously. If the servo-on command is turned on only for a slave
axis, torque will not be generated. Therefore, an extreme load will be applied to
the electromagnetic brake of the master axis for using in vertical axis system.
The master-slave operation function is available for servo amplifier with software
version A8 or later. All servo amplifiers used in the same system connected to a
controller should be software version A8 or later.
17. APPLICATION OF FUNCTIONS
17 - 69
(1) Summary
The master-slave operation function transmits a master axis torque to slave axes using driver
communication and the torque as a command drives slave axes by torque control.
Transmission of torque data from the master axis to slave axes is via SSCNET III/H. Additional wiring is
not required.
(2) System configuration
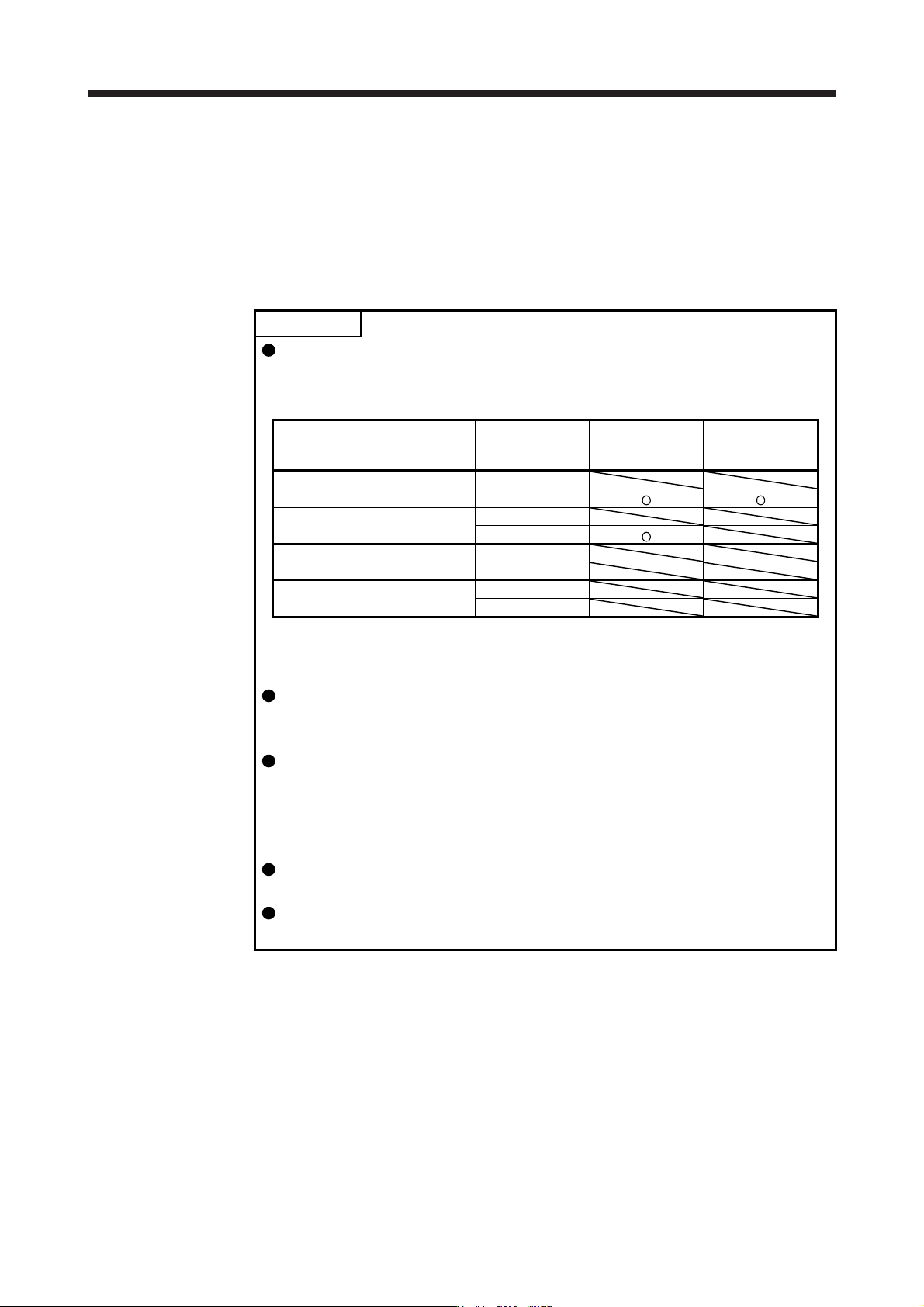
POINT
The control modes compatible with the master-slave operation function are as
follows.
Master-slave operation function compatibility table
Control mode
Forced stop
deceleration
function
Master axis (Note) Slave axis (Note)
Standard control mode
Enabled
Disabled
Fully closed loop control mode
Enabled
Disabled
Linear servo motor control mode
Enabled
Disabled
DD motor control mode
Enabled
Disabled
Note. When a setting for the master-slave operation is set to an axis which is not compatible with the
maste
r
-slave operation function, [AL. 37] will occur.
The master axis and slave axis are recommended to use for a linked condition
on a mechanical constitution. When they are not linked, they can reach a speed
limit level. Doing so may cause [AL. 31 Overspeed].
The slave axes use the control command from the master axis. Therefore, the
controller mainly controls parameter settings, servo-on command, acquisition of
monitor information from a servo amplifier, etc. The commands regarding
absolute positioning such as setting absolute position detection and requiring
home position setting from the controller to slave axes must not be made.
Configure the circuit so that all the master and slave axes are stopped at the
moment of a stop of a master or slave axis due to such as an alarm.
When the STO signal of a servo amplifier is used, the master axis and slave axis
should be turned off simultaneously.
17. APPLICATION OF FUNCTIONS
17 - 70
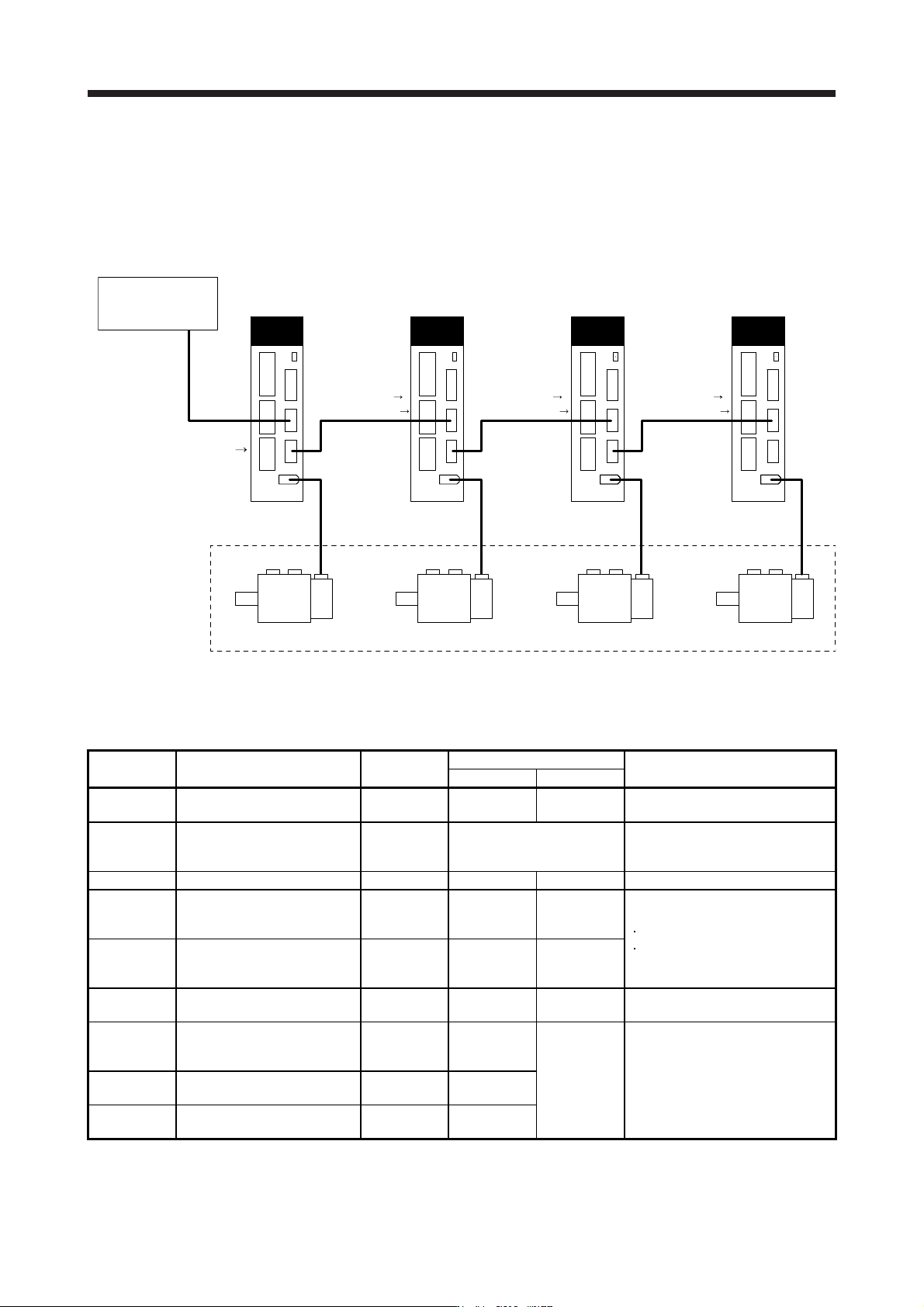
Eight master axes can be set at most per one system of SSCNET III/H. The maximum number of slave
axes to each master axis is not limited. However, the total number of the master and slave axes should
be the maximum number of the servo amplifiers at most. In addition, when an SSCNET III/H
communication shut-off occurs due to malfunction of a servo amplifier, the malfunctioning axis and later
axis cannot be communicated. Therefore, the first amplifier from the controller via SSCNET III/H cable
should be master axis.
Master axis
MR-J4-_B_(-RJ)
CN2 CN2 CN2 CN2
Slave axis 1
MR-J4-_B_(-RJ)
Slave axis 2
MR-J4-_B_(-RJ)
Slave axis 3
MR-J4-_B_(-RJ)
These are for the
same machine.
Controller
Position
command
[Driver communication]
Torque command
Speed limit command
[Driver communication] [Driver communication]
Torque command
Speed limit command
Torque command
Speed limit command
(3) Parameter setting for the master-slave operation function
To use the master-slave operation function, the following parameter settings are necessary. For details
of the parameters, refer to section 5.2.1 and 5.2.4.
No. Name Initial value
Setting value
Setting
Master axis Slave axis
PA04
Forced stop deceleration
function selection
2000 0 _ _ _ 0 _ _ _
Used to disable the forced stop
deceleration function.
PA14
Rotation direction
selection/travel direction
selection
0 Refer to section 5.2.1.
Used to set a torque generation
direction.
PD15 (Note) Driver communication setting 0000 0001 0010 Master and slave setting
PD16 (Note)
Driver communication setting -
Master - Transmit data
selection 1
0000 0038 0000
Communication data from master to
slave
Torque command
Speed limit value
PD17 (Note)
Driver communication setting -
Master - Transmit data
selection 2
0000 003A 0000
PD20 (Note)
Master axis No. selection 1 for
slave
0 0
Master axis
No.
Master axis No. of transmitting data
PD30
Master-slave operation -
Torque command coefficient on
slave
0 0
Refer to
section 5.2.4.
Ratio of torque command of slave
axis, ratio of speed limit value, and
setting of speed limit minimum value
PD31
Master-slave operation - Speed
limit coefficient on slave
0 0
PD32
Master-slave operation - Speed
limit adjusted value on slave
0 0
Note.
A
lwa
y
s set this with parameters of the controller.