sh030106u.pdf - 第638页
APPENDIX App. - 7 (7) Perform all risk asses sments and safety level c ertificat ion to th e machi ne or the system as a wh ole. It is recom mended tha t a Certific atio n Body f inal saf ety certif ication of the system…
APPENDIX
App. - 6
App. 5.3 Cautions
The following basic safety notes must be read carefully and fully in order to prevent injury to persons or
damage to property.
Only qualified personnel are authorized to install, start-up, repair or service the machines in which these
components are installed.
They must be familiar with all applicable local regulations and laws in which machines with these
components are installed, particularly the standards mentioned in this user's manual and the requirements
described in ISO/EN ISO 13849-1:2015, EN IEC 62061, EN 61508, IEC/EN 61800-5-2, and IEC/EN 60204-
1.
The staff responsible for this work must be given express permission from the company to perform start-up,
programming, configuration, and maintenance of the machine in accordance with the safety standards.
WARNING
Improper installation of the safety related components or systems may cause
improper operation in which safety is not assured, and may result in severe
injuries or even death.
Protective Measures
As described in IEC/EN 61800-5-2, the Safe Torque Off (STO) function only prevents the servo amplifier
from supplying energy to the servo motor. Therefore, if an external force acts upon the drive axis,
additional safety measures, such as brakes or counter-weights must be used.
App. 5.4 Residual risk
Machine manufacturers are responsible for all risk evaluations and all associated residual risks. Below are
residual risks associated with the STO/EMG function. Mitsubishi Electric is not liable for any damages or
injuries caused by the residual risks.
(1) The SS1 function only guarantees the delay time before STO/EMG is engaged. Proper setting of this
delay time is the full responsibility of the company and/or individuals responsible for installation and
commissioning of the safety related system. The system, as a whole, must pass safety standards
certification.
(2) When the SS1 delay time is shorter than the required servo motor deceleration time, if the forced stop
function is malfunctioning, or if STO/EMG is engaged while the servo motor is still rotating; the servo
motor will stop with the dynamic brake or freewheeling.
(3) For proper installation, wiring, and adjustment, thoroughly read the installation guide of each individual
safety related component.
(4) Be sure that all safety related switches, relays, sensors, etc., meet the required safety standards.
A Certification Body has confirmed that the Mitsubishi Electric safety-related components mentioned in
this manual meet ISO/EN ISO 13849-1:2015 Category 3, PL d, EN IEC 62061, and EN 61508 SIL 2.
(5) Safety is not assured until safety-related components of the system are completely installed or adjusted.
(6) When replacing a servo amplifier etc. or MR-J3-D05, confirm that the new equipment is exactly the same
as those being replaced. Once installed, be sure to verify the performance of the functions before
commissioning the system.
APPENDIX
App. - 7
(7) Perform all risk assessments and safety level certification to the machine or the system as a whole.
It is recommended that a Certification Body final safety certification of the system be used.
(8) To prevent accumulation of multiple malfunctions, perform a malfunction check at regular intervals as
deemed necessary by the applicable safety standard. Regardless of the system safety level, malfunction
checks should be performed at least once per year.
(9) If the upper and lower power modules in the servo amplifier are shorted and damaged simultaneously,
the servo motor may make a half revolution at a maximum. For a linear servo motor, the primary side will
move a distance of pole pitch.
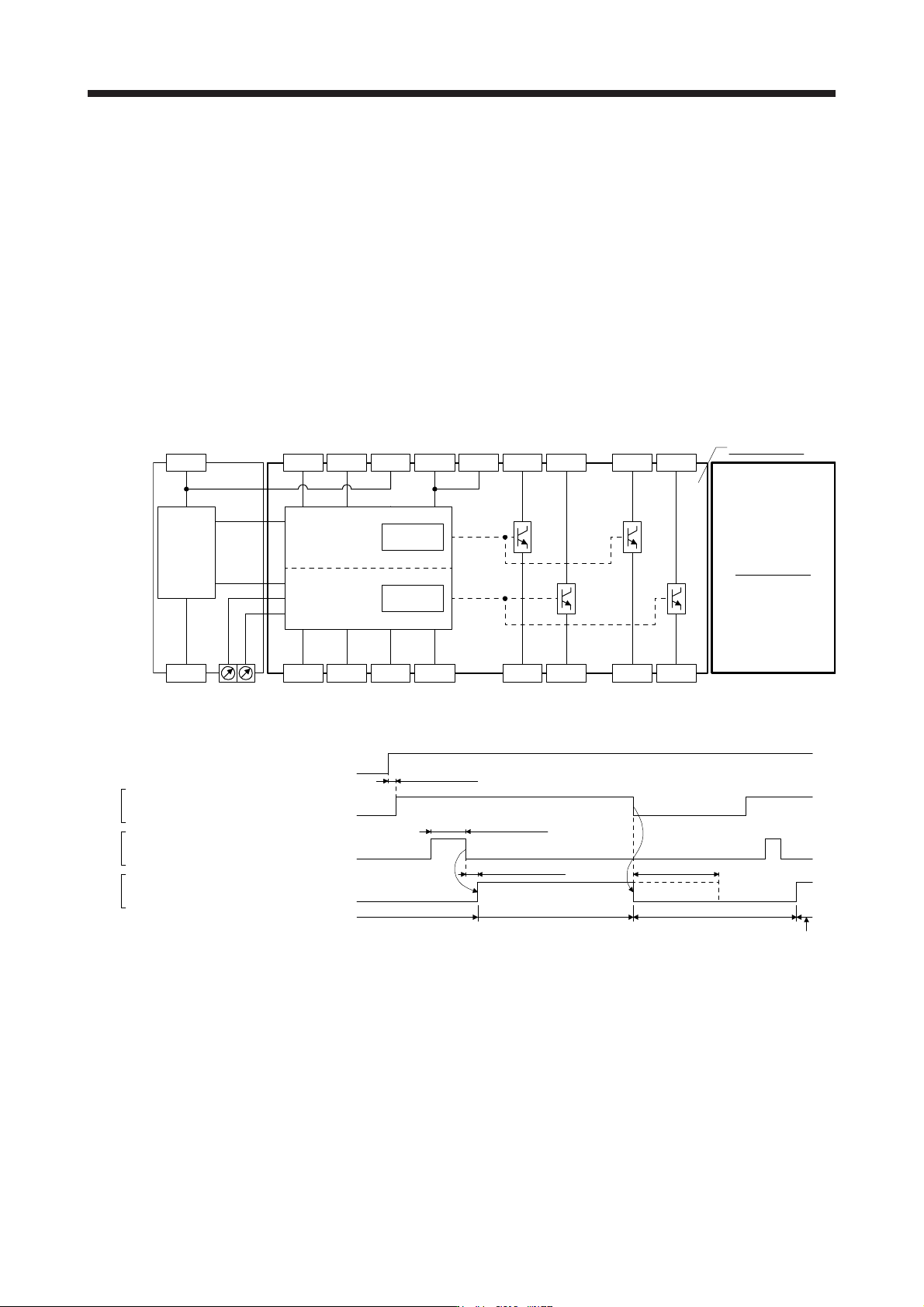
App. 5.5 Block diagram and timing chart
(1) Function block diagram
SDI1A- SDI2A- SDI1B- SDI2B- STO1A- STO2A- SDO1A- SDO2A-
SRESA+ SRESA- TOF1A TOF2A STO1A+ STO2A+ SDO1A+ SDO2A+TOFA
0V
+24V
DCDC
power
Safety logic
TIMER1
TIMER2
A
-axis circui
t
SW1 SW2
B-axis circuit
(2) Operation sequence
A-axis shutdown 1 and 2
B-axis shutdown 1 and 2
Energizing (close)
Shut-off (open)
Release (close)
Normal (open)
Normal (close)
Shut-off (open)
A-axis EMG start/reset
B-axis EMG start/reset
A-axis STO state 1 and 2
B-axis STO state 1 and 2
10 ms or shorter Shut off delay (SW1 and SW2) (Note)
STO status
Control enabled
STO status
50 ms or longer
SDI
SRES
STO
15 ms or longer
Power supply
Control enabled
Note. Refer to App. 5.10.
App. 5.6 Maintenance and disposal
MR-J3-D05 is equipped with LED displays to check errors for maintenance.
Please dispose this unit according to your local laws and regulations.
APPENDIX
App. - 8
App. 5.7 Functions and configuration
App. 5.7.1 Summary
MR-J3-D05 has two systems in which the each system has SS1 function (delay time) and output of STO
function.
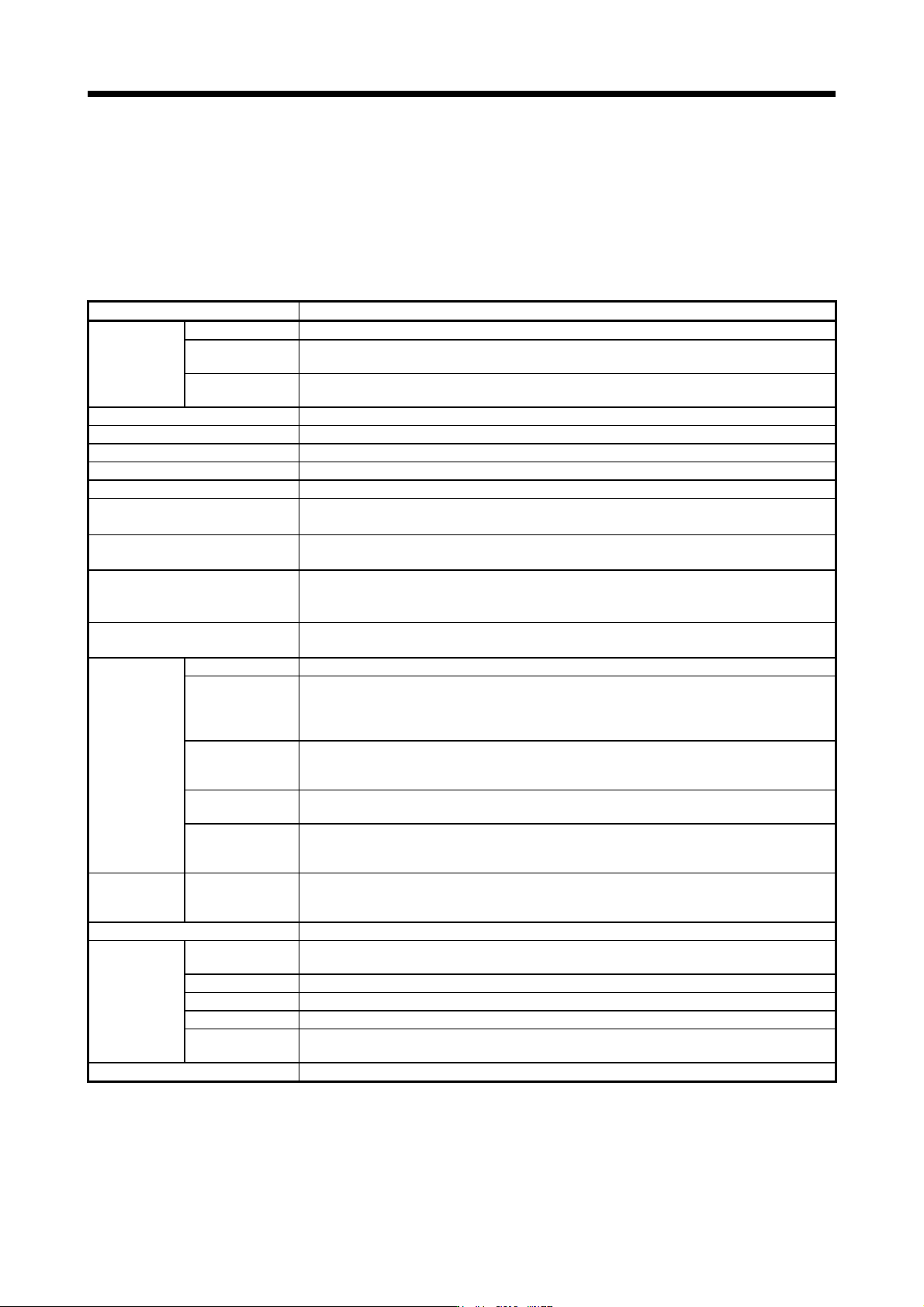
App. 5.7.2 Specifications
Safety logic unit model MR-J3-D05
Control circuit
power supply
Voltage 24 V DC
Permissible
voltage fluctuation
24 V DC ± 10%
Power supply
capacity
[A] 0.5 (Note 1, 2)
Compatible system 2 systems (A-axis, B-axis independent)
Shut-off input 2 points (duplex wiring) SDI
_
: (source/sink compatible) (Note 3)
Shut-off release input 1 point (duplex wiring) SRES
_
: (source/sink compatible) (Note 3)
Feedback input 1 point (duplex wiring) TOF
_
: (source compatible) (Note 3)
Input type Photocoupler insulation, 24 V DC (external supply), internal limited resistance 5.4 kΩ
Shut-off output
4 points (duplex wiring)
STO
_
: (source compatible) (Note 3)
SDO
_
: (source/sink compatible) (Note 3)
Output method
Photocoupler insulation, open-collector type
Permissible current: 40 mA/1 output, Inrush current: 100 mA/1 output
Delay time setting
A-axis: Select from 0 s, 1.4 s, 2.8 s, 5.6 s, 9.8 s, or 30.8 s.
B-axis: Select from 0 s, 1.4 s, 2.8 s, 9.8 s, or 30.8 s.
Accuracy: ±2%
Functional safety
STO, SS1 (IEC/EN 61800-5-2)
EMG STOP, EMG OFF IEC/EN 60204-1)
Safety
performance
Standard ISO 13849-1:2015 Category 3 PL d, EN IEC 62061, EN 61508 SIL2, IEC 61800-5-2
Response
performance (when
delay time is set to
0 s) (Note 4)
10 ms or less (STO input off → shut-off output off)
Mean time to
dangerous failure
(MTTFd)
MTTFd ≥ 100 [years] (516a)
Diagnosis
converge (DC avg)
DC = Medium, 93.1 [%]
Probability of
dangerous failures
per hour (PFH)
4.75 × 10
-9
[1/h]
Global
standards
CE marking
LVD: EN 61800-5-1
EMC: EN 61800-3
MD: EN ISO 13849-1:2015, EN 61800-5-2, EN IEC 62061
Structure Natural-cooling, open (IP rating: IP 00)
Environment
Ambient
temperature
0 °C to 55 °C (non-freezing), storage: -20 °C to 65 °C (non-freezing)
Ambient humidity 5 %RH to 90 %RH (non-condensing), storage: 5 %RH to 90 %RH (non-condensing)
Ambience Indoors (no direct sunlight), free from corrosive gas, flammable gas, oil mist, dust, and dirt
Altitude Max. 1000 m above sea level
Vibration
resistance
5.9 m/s
2
at 10 Hz to 55 Hz (directions of X, Y and Z axes)
Mass [kg] 0.2 (including CN9 and CN10 connectors)
Note 1. Inrush current of approximately 1.5 A flows instantaneously when turning the control circuit power supply on. Select an
appropriate capacity of power supply considering the inrush current.
2. Power-on duration of the safety logic unit is 100,000 times.
3.
_
: in signal name indicates a number or axis name.
4. For the test pulse input, contact your local sales office.