sh030106u.pdf - 第662页
APPENDIX App. - 31 App. 10. 3.2 Ful ly closed loop contr ol FBN FBD Droop pulses Speed command Position control Speed control PWM Current control Current command Bus voltage Speed command Current encoder + Servo motor En…
APPENDIX
App. - 30
Note 1. Encoder pulse unit.
2.
A
vailable in position control mode
3. This cannot be used in the torque control mode.
4. This can be used with MR Confi
g
urator2 with software version 1.19V or later.
5. This cannot be used in the speed control mode.
6. Output in the load-side encoder unit for the fully closed loop control. Output in the servo motor encoder unit for the semi closed
loop control.
7. For 400 V class servo amplifier, the bus volta
g
e becomes +8 V/800 V.
8. For details on the maximum current command
(
maximum torque
)
for ±8 V, refer to app. 10.4 for details.
App. 10.3 Analog monitor block diagram
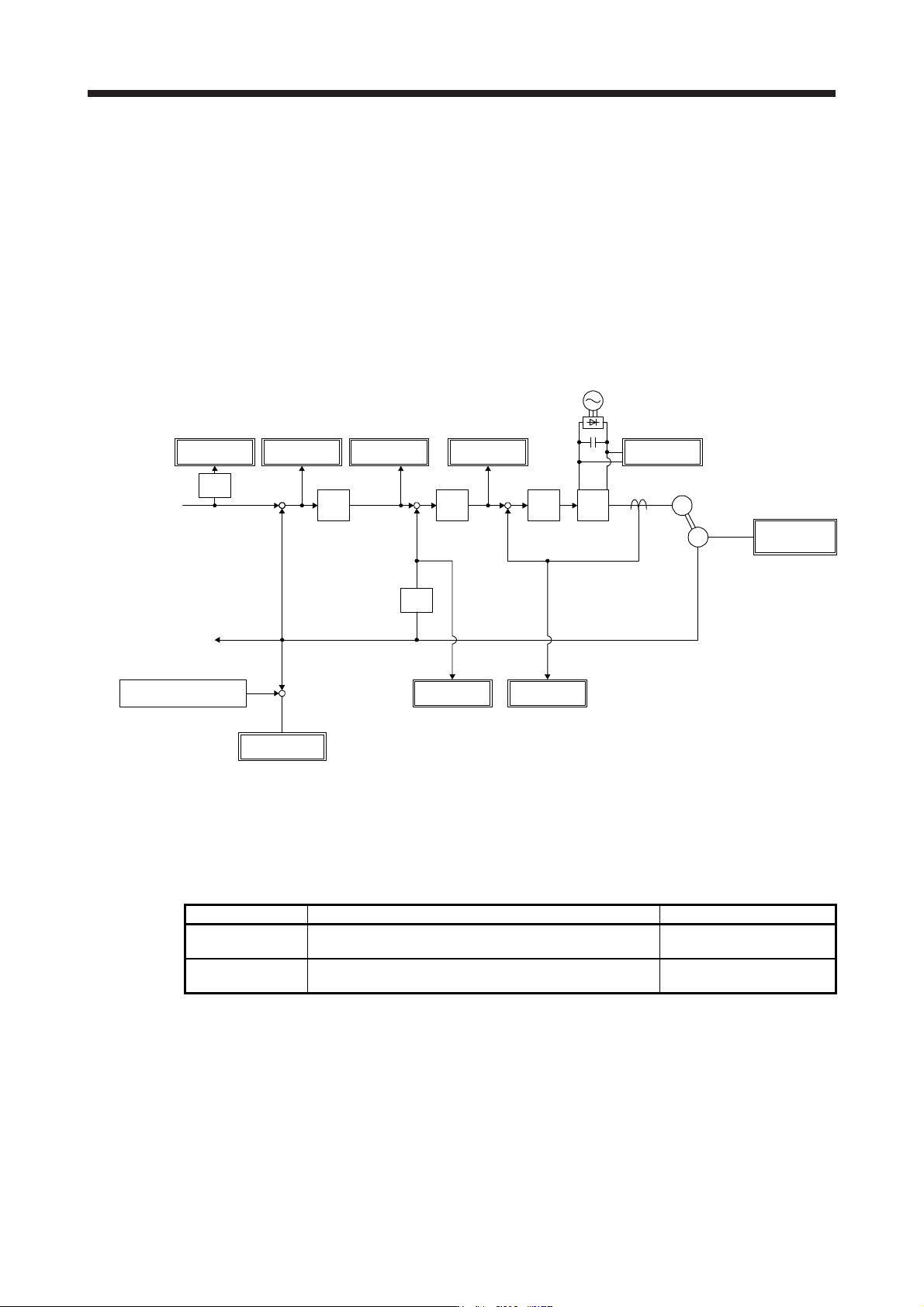
App. 10.3.1 Semi closed loop control
Droop pulses
Speed
command
Position
control
Speed
control
PWM
Current
control
Current
command
Bus voltage
Speed
command
Current
encoder
+
Servo motor
Encoder
Current feedback
Position feedback
M
Position command
received from a
servo system
controller
Position feedback data
returned to a servo
system controller
Differen-
tiation
Differen-
tiation
Feedback position
standard position (Note)
Feedback
position
+
-
Internal
temperature
of encoder
Servo motor
speed
Torque
+
+
-
-
+
-
Speed
command 2
Note. The feedback position is output based on the position data passed between servo system controller and servo amplifier. [Pr.
PC13] and [Pr. PC14] can set up the standard position of feedback position that is output to analog monitor in order to adjust the
output ran
g
e of feedback position. The settin
g
ran
g
e is between -9999 pulses and 9999 pulses.
Standard position of feedback position = [Pr. PC14] setting value × 10000 + [Pr. PC13] setting value
Parameter Description Setting range
PC13
Sets the lower-order four digits of the standard position of
feedback position
-9999 to 9999 [pulse]
PC14
Sets the higher-order four digits of the standard position of
feedback position
-9999 to 9999 [10000 pulses]
APPENDIX
App. - 31
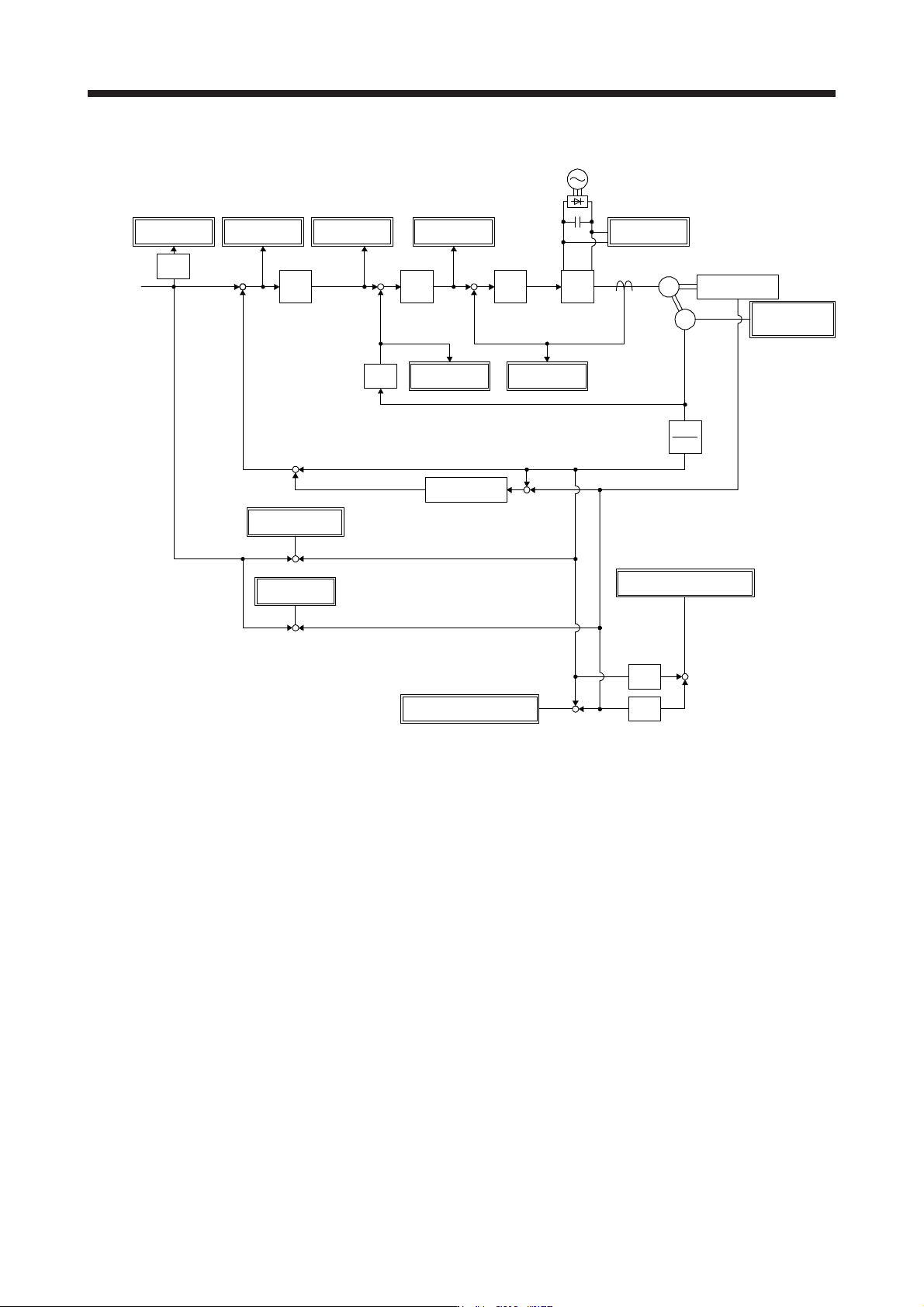
App. 10.3.2 Fully closed loop control
FBN
FBD
Droop pulses
Speed
command
Position
control
Speed
control
PWM
Current
control
Current
command
Bus voltage
Speed
command
Current
encoder
+
Servo
motor
Encoder
Current feedback
Position feedback
M
Position
command
Differ-
entiation
Differ-
entiation
Dual filter
Servo motor-side
droop pulses
Load-side
droop pulses
Servo motor-side/load-side
position deviation
+
-
Load-side
encoder
Internal
temperature
of encoder
Fully closed loop
+-
+
-
Differen-
tiation
Differen-
tiation
Servo motor-side/load-side
speed deviation
+
-
+
+
Semi closed loop
+-
Servo motor
speed
Torque
Servo motor-side feedback pulses
(load-side encoder resolution unit)
Load-side feedback pulses
+
+
-
-
+
-
Speed
command 2
APPENDIX
App. - 32
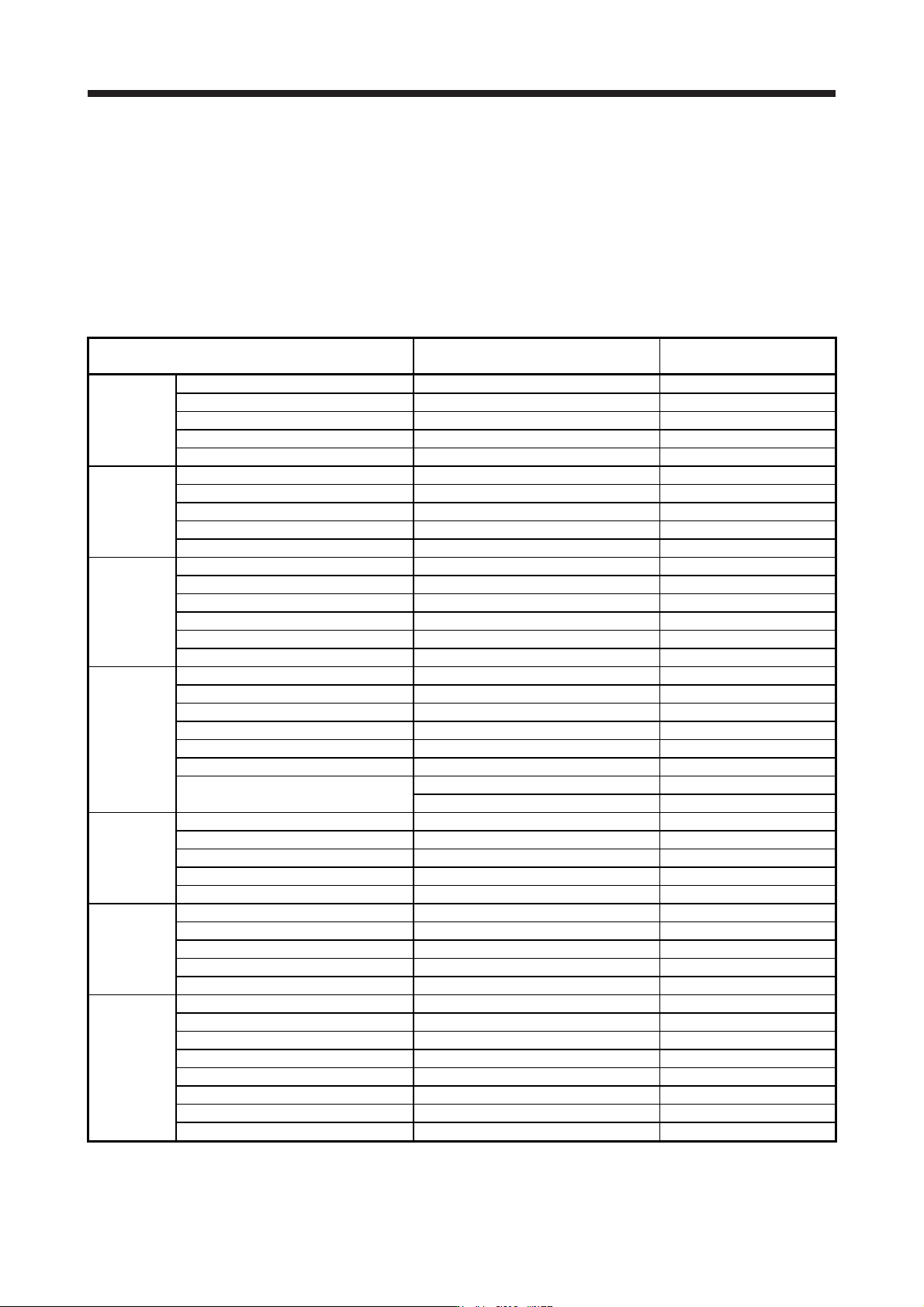
App. 10.4 Maximum current command (maximum torque) for analog monitor ±8 V
Values of the maximum current command (maximum torque) when the analog monitor is ±8 V are listed.
The current command (torque) outputs the maximum current command (maximum torque) at ±8 V. The
maximum current command (maximum torque) may not match the rated current/maximum current ratio since
it is created from the torque current in the servo amplifier.
App. 10.4.1 Rotary servo motor
(1) 200 V/100 V class
Servo motor Servo amplifier/drive unit
Maximum current command
(maximum torque) [%]
HG-KR series
HG-KR053 MR-J4-10_(-RJ)/MR-J4-10_1(-RJ) 370
HG-KR13 MR-J4-10_(-RJ)/MR-J4-10_1(-RJ) 373
HG-KR23 MR-J4-20_(-RJ)/MR-J4-20_1(-RJ) 387
HG-KR43 MR-J4-40_(-RJ)/MR-J4-40_1(-RJ) 383
HG-KR73 MR-J4-70_(-RJ) 367
HG-MR series
HG-MR053 MR-J4-10_(-RJ)/MR-J4-10_1(-RJ) 342
HG-MR13 MR-J4-10_(-RJ)/MR-J4-10_1(-RJ) 336
HG-MR23 MR-J4-20_(-RJ)/MR-J4-20_1(-RJ) 396
HG-MR43 MR-J4-40_(-RJ)/MR-J4-40_1(-RJ) 361
HG-MR73 MR-J4-70_(-RJ) 345
HG-SR 1000
r/min series
HG-SR51 MR-J4-60_(-RJ) 311
HG-SR81 MR-J4-100_(-RJ) 329
HG-SR121 MR-J4-200_(-RJ) 353
HG-SR201 MR-J4-200_(-RJ) 334
HG-SR301 MR-J4-350_(-RJ) 366
HG-SR421 MR-J4-500_(-RJ) 347
HG-SR 2000
r/min series
HG-SR52 MR-J4-60_(-RJ) 302
HG-SR102 MR-J4-100_(-RJ) 310
HG-SR152 MR-J4-200_(-RJ) 320
HG-SR202 MR-J4-200_(-RJ) 327
HG-SR352 MR-J4-350_(-RJ) 332
HG-SR502 MR-J4-500_(-RJ) 341
HG-SR702
MR-J4-700_(-RJ) 336
MR-J4-DU900_(-RJ) 446
HG-UR series
HG-UR72 MR-J4-70_(-RJ) 355
HG-UR152 MR-J4-200_(-RJ) 340
HG-UR202 MR-J4-350_(-RJ) 350
HG-UR352 MR-J4-500_(-RJ) 320
HG-UR502 MR-J4-500_(-RJ) 330
HG-RR series
HG-RR103 MR-J4-200_(-RJ) 300
HG-RR153 MR-J4-200_(-RJ) 250
HG-RR203 MR-J4-350_(-RJ) 290
HG-RR353 MR-J4-500_(-RJ) 270
HG-RR503 MR-J4-500_(-RJ) 270
HG-JR 1000
r/min series
HG-JR601 MR-J4-700_(-RJ)/MR-J4-DU900_(-RJ) 337
HG-JR801 MR-J4-11K_(-RJ)/MR-J4-DU900_(-RJ) 366
HG-JR12K1 MR-J4-11K_(-RJ)/MR-J4-DU11K_(-RJ) 346
HG-JR15K1 MR-J4-15K_(-RJ)/MR-J4-DU15K_(-RJ) 339
HG-JR20K1 MR-J4-22K_(-RJ)/MR-J4-DU22K_(-RJ) 337
HG-JR25K1 MR-J4-22K_(-RJ)/MR-J4-DU22K_(-RJ) 330
HG-JR30K1 MR-J4-DU30K_(-RJ) 330
HG-JR37K1 MR-J4-DU37K_(-RJ) 330