SM421 Introduction(Chi Ver1).pdf - 第72页
Samsung Component Placer SM421 Intr oduction 6-2 6.2. X-Y 框架部分 6.2.1. 结构 图 6-2. X-Y 框架部分 6.3. PCB T ransport System 6.3.1. 构成 PCB T ransport System 传送系统的 主要工作是传送从前道工序传过 来的 PCB ,指 定部品的贴装位置,固定 PCB 的系统。 由于 PCB T ransport Sy…
Module Function
6-1
第6章. Module Function
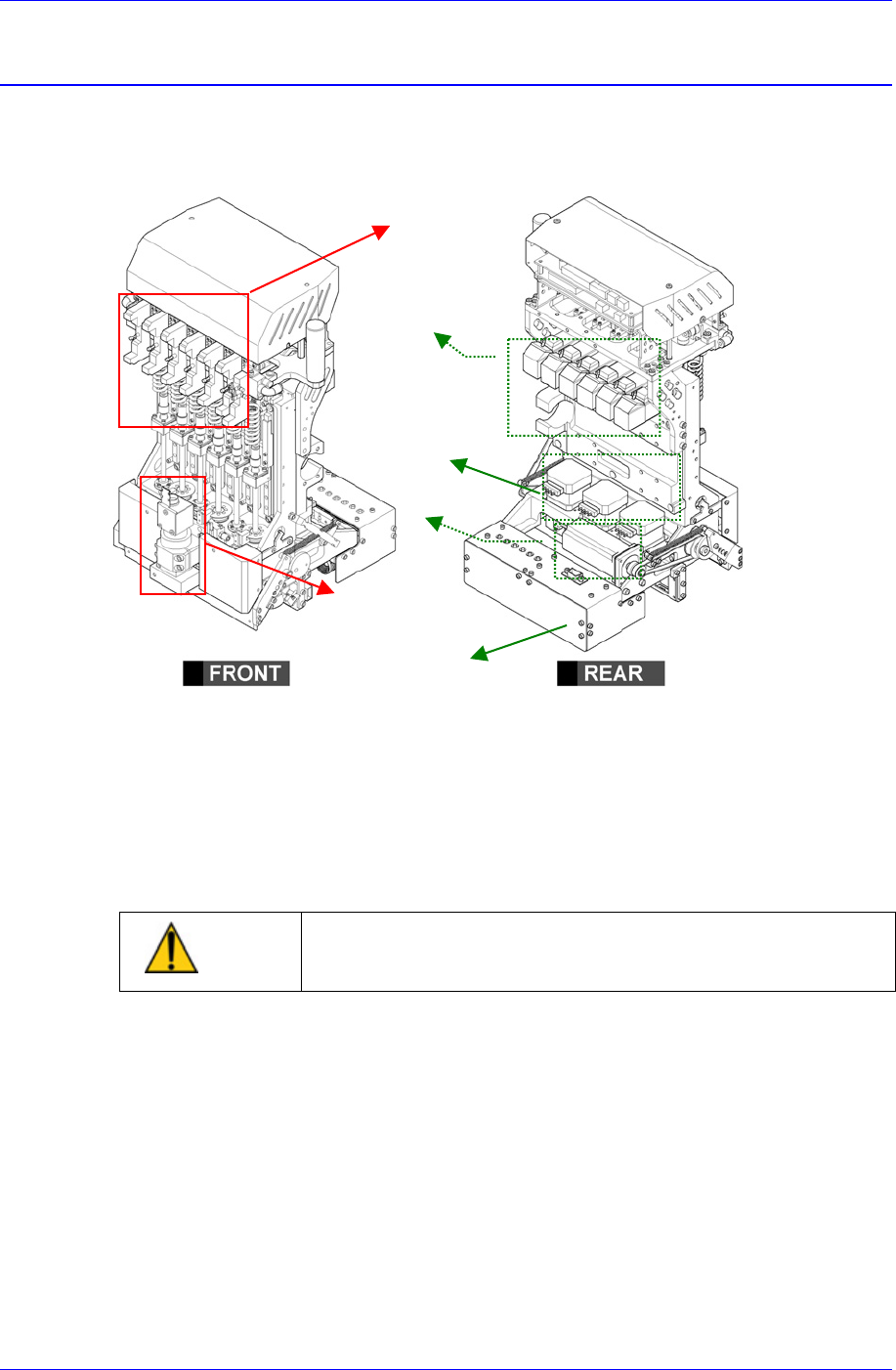
6.1. Head组件(Head Assembly)
6.1.1. Head组件
图
6-1. Head Assembly
吸头组件 ( Head Assembly ) 用一个模块制作 , 此模块由6个轴单元 ( Spindle
Units)来构成。
每个Spindle有各自的Flying Vision Camera,因为它采用了非接触式部品排列方
式(中心定位方式),使得设备运行操作更加稳定。为了从带式喂料器(Tape
Feeder )同时Pickup 所有Spindle ,安装Spindle 时每个Spindle 之间留有间隙
(30.00mm)。
警 告
当吸头的Z轴下降时,将手伸到吸头下面可能有受伤的危险。
设备运行时不可以将手伸到吸头下面。
真空阀(Vacuum Valve)
θ轴的马达
基准点摄象机
(Fiducial Camera)
Flying Vision
Z轴的马达
Mirror轴 Motor
Samsung Component Placer SM421 Introduction
6-2
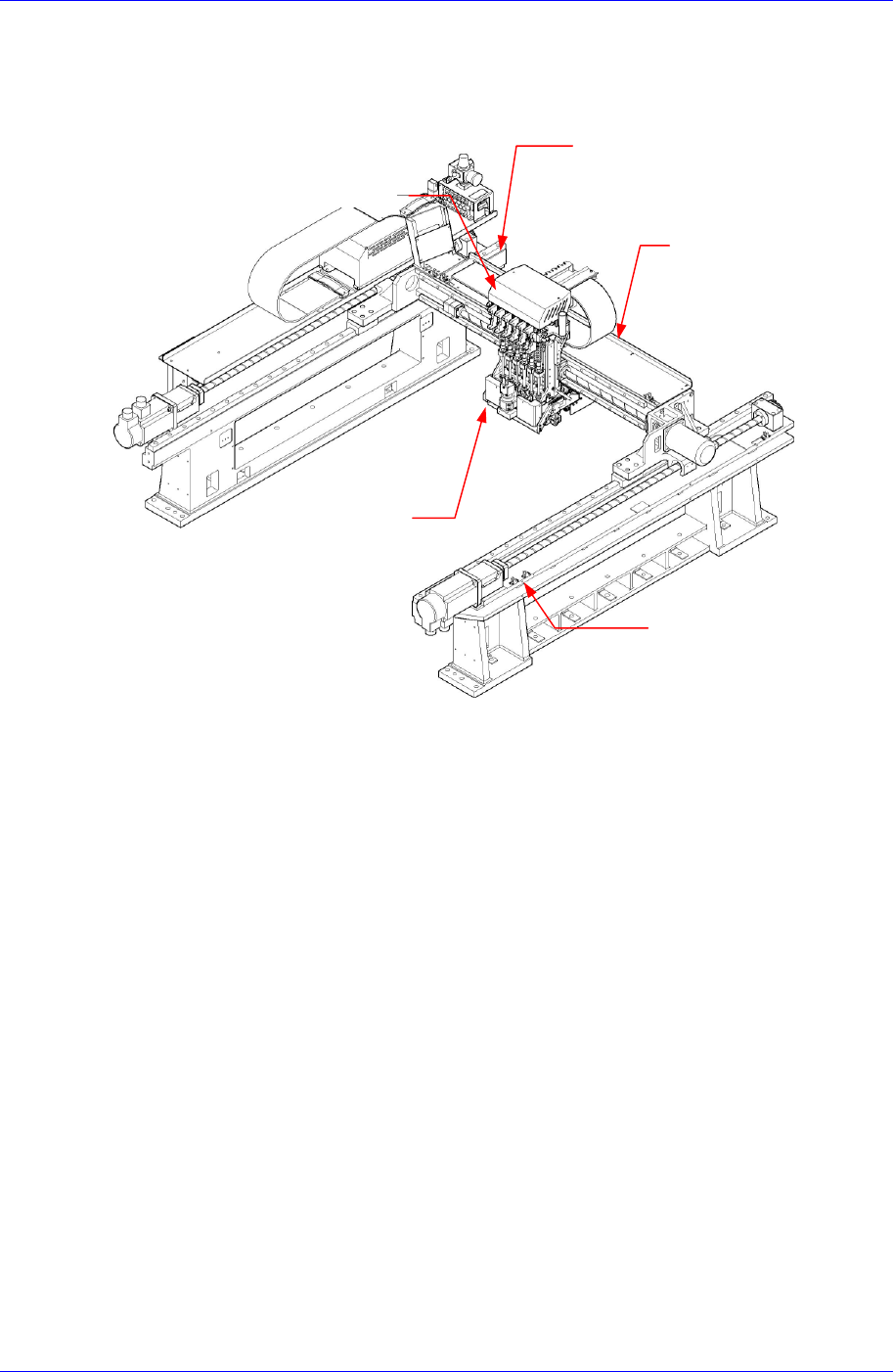
6.2. X-Y 框架部分
6.2.1. 结构
图
6-2. X-Y
框架部分
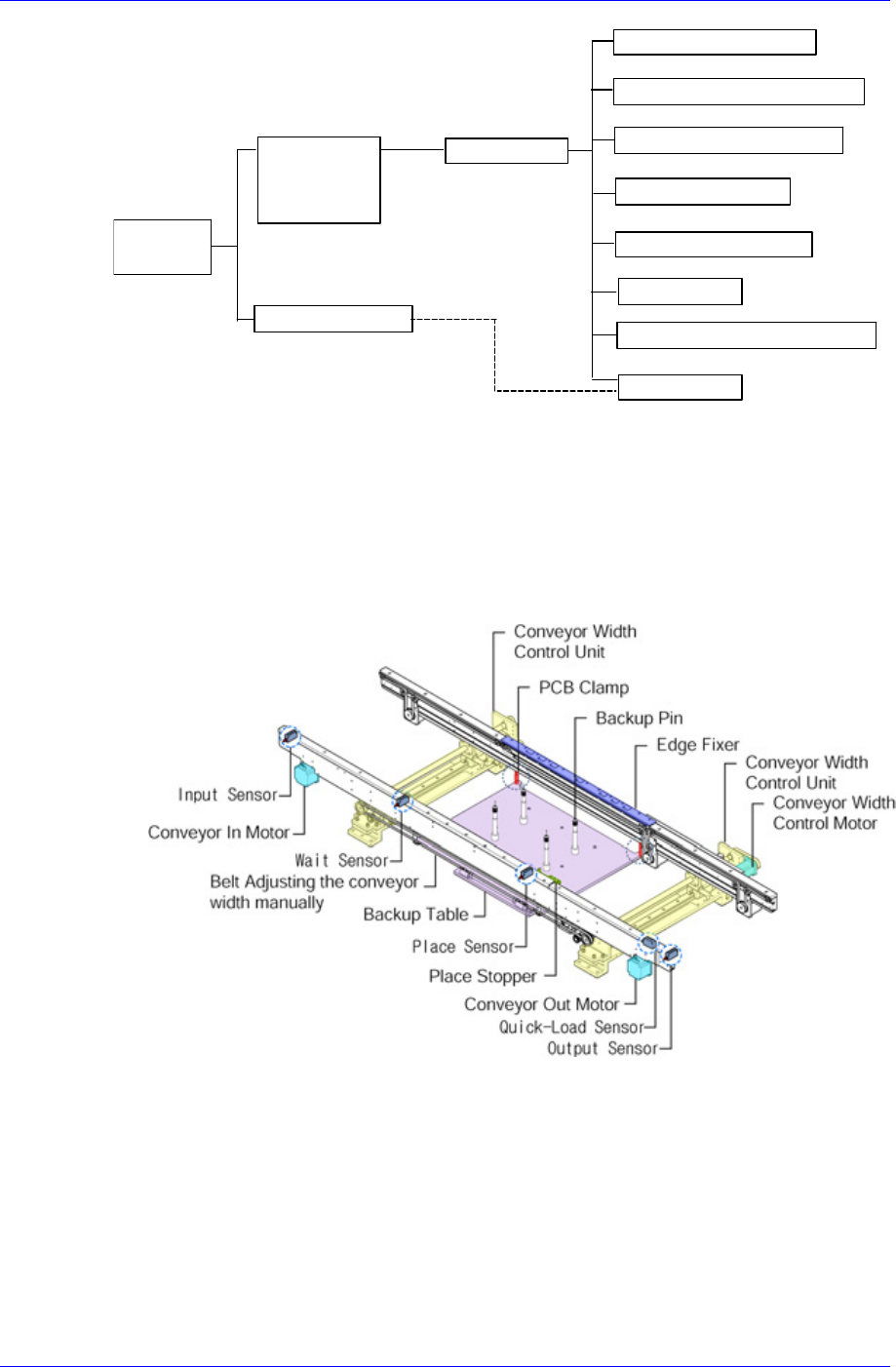
6.3. PCB Transport System
6.3.1. 构成
PCB Transport System 传送系统的主要工作是传送从前道工序传过来的 PCB,指
定部品的贴装位置,固定 PCB 的系统。
由于 PCB Transport System 传送系统分成3段,具有把 PCB 交替时间缩短为最小
限度的特点。固定PCB时,采用从PCB上面固定的方式,提高 PCB的平面度。
可以适应从小型 PCB((L)50.0mm×(W)30.0mm)到大型 PCB Transport System PCB
((L)610.0mm×(W)510.0mm)的比较广泛的范围。
请参考 “2.6.1 PCB
的规格,弯曲允许误差
“ 。 PCB传送系统的构成分为如下。
Y2 Frame
X Frame
Y1 Frame
Carrier Ass’y
Head Assembly
Module Function
6-3
Conveyor
Part
Width
Control
Part
Back Up Table
Main Frame
PCB In Belt Ass`y
PCB Working Belt Ass`y
PCB Out Belt Ass`y
Working Stopper
PCB Detect Sensor
Edge Fixer
Auto Width Control Unit
PCB Clamp
图
6-3. PCB
传送系统(
Conveyor System
)的结构图
6.3.2. 功能
各构成部分的功能如下。
主框架(Main Frame)
安装在宽度调整部件上,构成PCB传送的基本条件,其上面配各种部品。
图
6-4. PCB Conveyor System Main Frame
宽度调整部件
根据PCB Size调节Rail宽度的部分,由LM Guide和Lead Screw, Timing Belt, C
onveyor宽度手动调节带等构成。