RX-6_机器控制参数.pdf - 第89页
机器控制参数 2- 82 2-3- 4 设定传送 规格 如将 “速度区分” 设置为欲编辑的索引, 即可对所设置的区分的 “传送缓冲区移动监视时 间 ” 、“ 传 送控制时传感器 ON → OFF 监视时间”进行编辑。
机器控制参数
2-81
动作区分
2-3-3-2
No.
类别
内容
1 0 PTP动作
2 1 JOG基础属性
3 2 单步
4 3 返回原点(查找HOME)
5 4 返回原点(查找Z相)
6 5 (双)基准轨道PTP动作
7 6~9 预备
机器控制参数
2-82
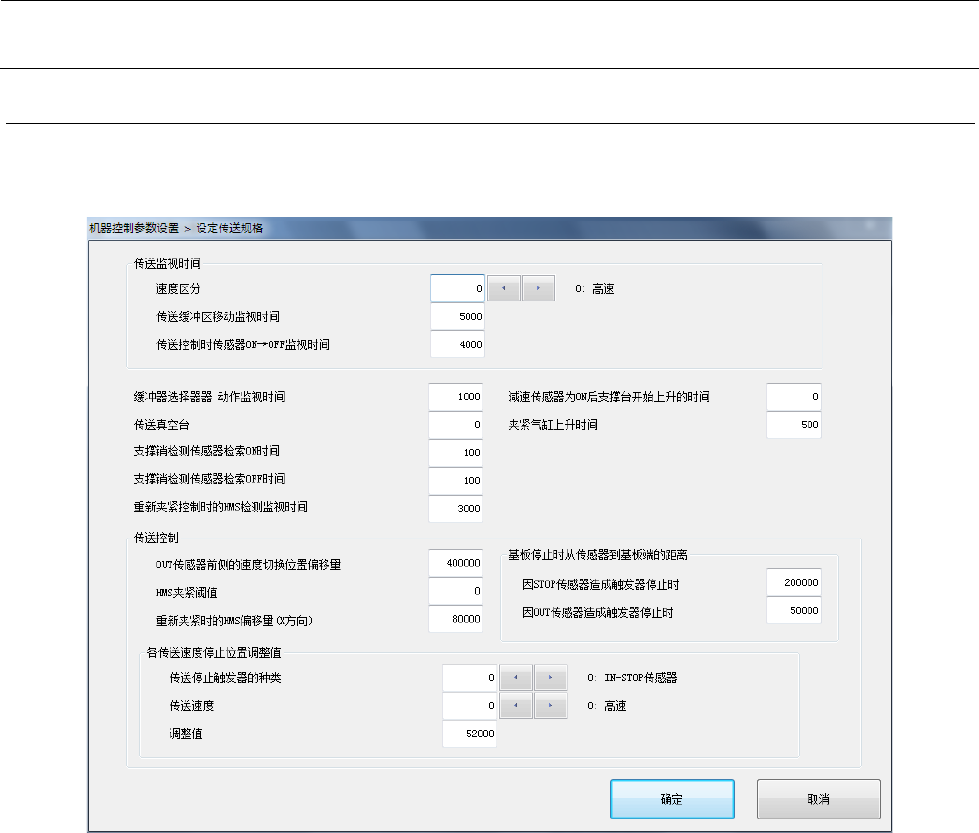
2-3-4
设定传送规格
如将“速度区分”设置为欲编辑的索引,即可对所设置的区分的“传送缓冲区移动监视时间” 、“ 传
送控制时传感器
ON→OFF监视时间”进行编辑。
机器控制参数
2-83
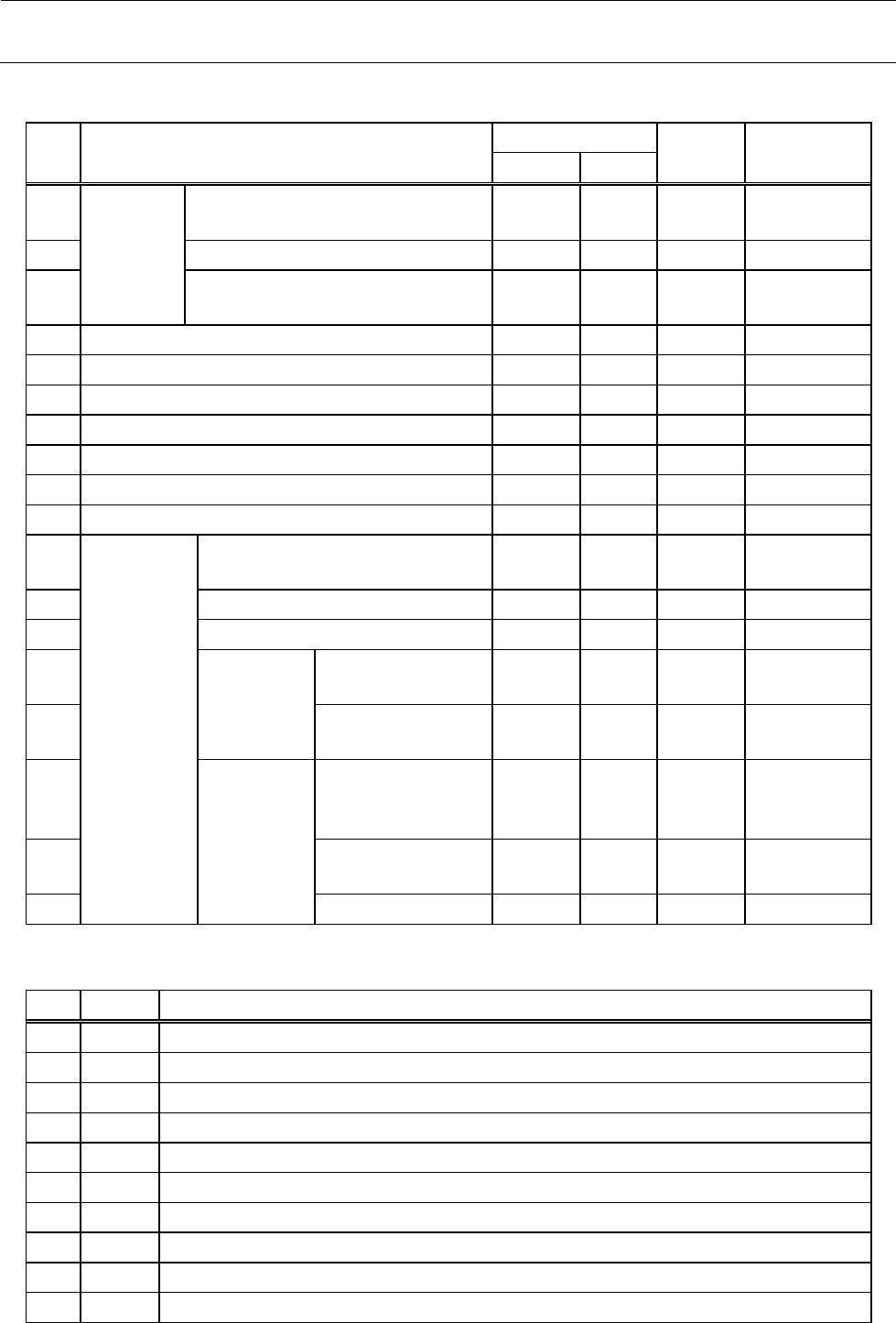
设定项目
2-3-4-1
No.
项目
输入范围
单位
备考
最小值
最大值
1 传送监视
时间
速度区分 0 9 参照2-3-4-2
速度区分
2 传送缓冲区移动监视时间 0 65535
3 传送控制时传感器 ON→OFF 监视时
间
0 65535
4 缓冲器选择器 动作监视时间
5 传送真空台
6 支撑销检测传感器检索ON时间
7 支撑销检测传感器检索OFF时间
8 重新夹紧控制时的HMS检测监视时间
9 减速传感器为ON后支撑台开始上升的时间
10 夹紧气缸上升时间
11 传送控制 OUT 传感器前侧的速度切换位置
偏移量
12 HMS 夹紧阈值
13 重新夹紧时的 HMS 偏移量(X 方向)
14 基板停止时
从传感器到
基板端的距
离
因 STOP 传感器造成
触发器停止时
15 因 OUT 传感器造成
触发器停止时
16 各传送速度
停止位置调
整值
传送停止触发器的
种类
0 1 参照2-3-4-3
传送停止触
发器的种类
17 传送速度 0 9 参照2-3-4-4
传送速度
18 调整值
速度区分
2-3-4-2
No.
类别
内容
1 0 高速
2 1 中速
3 2 低速
4 3 低速2
5 4 高速2
6 5 预备进给(56mm/s)
7 6 输送对接高速
8 7 输送对接中速
9 8 输送对接低速
10 9 输送对接高速2