深度解析JUKI设备调试.pdf - 第145页
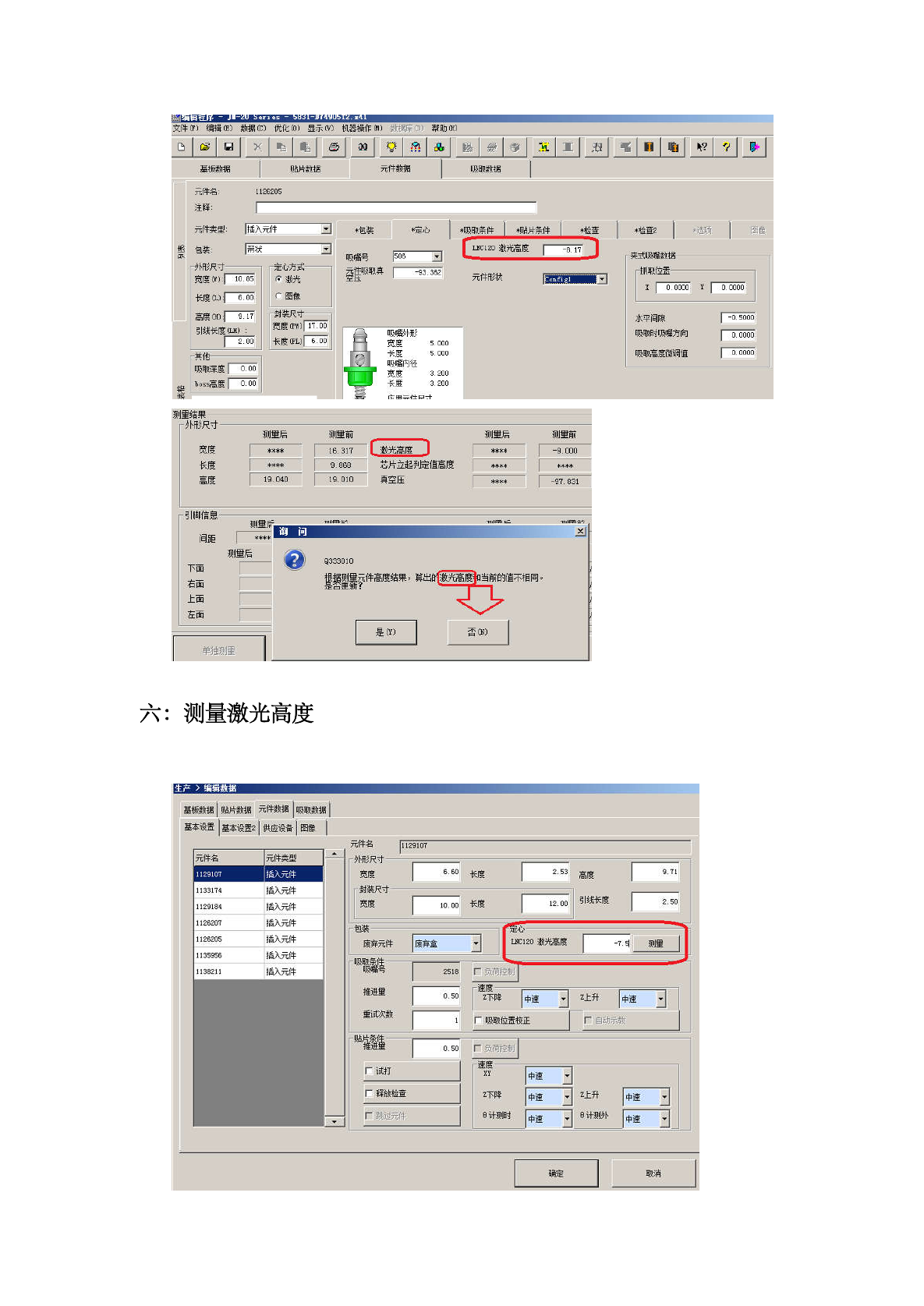
瀲綠度酬 1 范囤 厂綱置方向 — — P 将剜定结果 g 映到亓件教撺 激光甚度健结果 1 ) 、 激光高度测量值 激光离度测量值 显示进行激光离度检测的必要内容 u ( ) 内显示测量前的值 U 1 ) 元件离度 显示元件的高度 . 2 ) 激光高度 可以任意变更激光高度 。 这里设置的值 . 作为 u 激光高度判定范围 ■ 开始时的 ■ ■ 当前的激光高度位置 " 使用 。 3 ) 把测量结果反映在元件数据上 . 在…
文 件
(
F
)
编 辑
CE
)
教 据
(
C
)
优 化
(
0
)
显 示
(
V
)
机 器 操 作
⑷
教 掮 库
0 0
帮 助
0 0
D
^
EI
x
%
龜
a
如
a
色 必 險
#
令
^
%
fi
m
呤
7
降
亓件数据
基板教据
贴片数指
吸取教掮
亓件名
:
1126205
注释
:
|
插入元件
ZJ
*
包装
元件类型
:
*
定心
*
迭项
图像
*
吸取条件
*
贴片条件
木检查
*
检查
2
LHC
120
瀲光高度
述 包 装
:
4
卜形尺寸
宽度
⑴
:
1
长度
CL
)
j
-
8
.
17
夹式吸堪數掮
-
抓取位置一
|
506
吸嘴号
|
|
0
鹏
[
专心方式
.
P
激光
广图像
-
93
.
362
亓件形状
ISHBE
]
10.85
0.0000
0
.
0000
6.00
-
封装尺寸
r
宽度
㈣
|
17.00
长度
CPL
)
f
高度
CH
)
f
引线长度
㈣
:
9.17
水平间陳
吸取时吸堪方向
-
0.5000
吸堪外形
0.0000
6.00
2.00
宽度
5.000
5.000
吸取高度微调值
长度
0.0000
其他
吸曜内径
吸取深度
I
boss
高度
I
0.00
宽度
3.200
3.200
长度
0.00
命田
^
杜
PTf
蒯星结果
外形尺寸
1
厘后
1
J
里前
16.317
[
激 光 高 度
1
芯片立起判定值高度
真空压
则里后
纖前
宽度
-
9.000
[
长度
9.868
木本本本
本本本本
高度
I
19.040
19.010
-
97.831
引
_
信息
1
J
里斤
■
间距
#
剜里后
Q
333010
下面
光高度当前的值不相同
。
错槊
_
霧歹件高度结果
,
算出
^
右面
上面
左面
是
C
0
son
单独剜重
六
:
测量激光高度
>
璀箱教据
基板教
《
|
貼片教
te
元
_
18
|
吸取鈞班
|
S
本设
fi
|
基
$
设
2
—
设 奋
|
隊
|
元件名
11129107
|
兄件名
|
元喊
as
]
*
侧尺寸
6
.
&
0
2.53
9.71
m
长度
射装尺寸
1133174
引线长度
2.50
m
长
《
12.00
ISA
亓件
10.00
1129181
成入元件
m
l
£
X
开件
菝 弃 亓 伴
|
菝 弇 宝
n
112
&
205
u
«
ci
2
o
激
?
1
tarn
-
T
.
^
刻里
1135956
I
6
X
亓件
2518
r
1138211
推进里
|
中速
d
0.50
Z
下眸
Z
上 升
中
S
里
iiC
欠热
「
maim
i
厂极取位
S
校正
貼
,
0.50
厂负荷
tHj
速度
厂
iit
打
n
中速
厂腦检豆
rm
z
上升
中速
中速
eiHH
时
r
跳細
:
中速
中速
取消
瀲綠度酬
1
范囤
厂綱置方向
——
P
将剜定结果
g
映到亓件教撺
激光甚度健结果
1
)
、
激光高度测量值
激光离度测量值
显示进行激光离度检测的必要内容
u
(
)
内显示测量前的值
U
1
)
元件离度
显示元件的高度
.
2
)
激光高度
可以任意变更激光高度
。
这里设置的值
.
作为
u
激光高度判定范围
■
开始时的
■
■
当前的激光高度位置
"
使用
。
3
)
把测量结果反映在元件数据上
.
在勾选框里选择是否把测量结果立即反映在元件数据上
.
4
)
同时测量元件高度
在测量激光髙度前测
S
元件髙度
。
同时自动计算激光高度
。
在这种情况下
,
自动计算的激光高度
.
作为
激光高度判定范围
■
■
开始时的
°
当前的激光离
度位
M
"
使用
.
激光高度不能任意指定
1
2
)
、
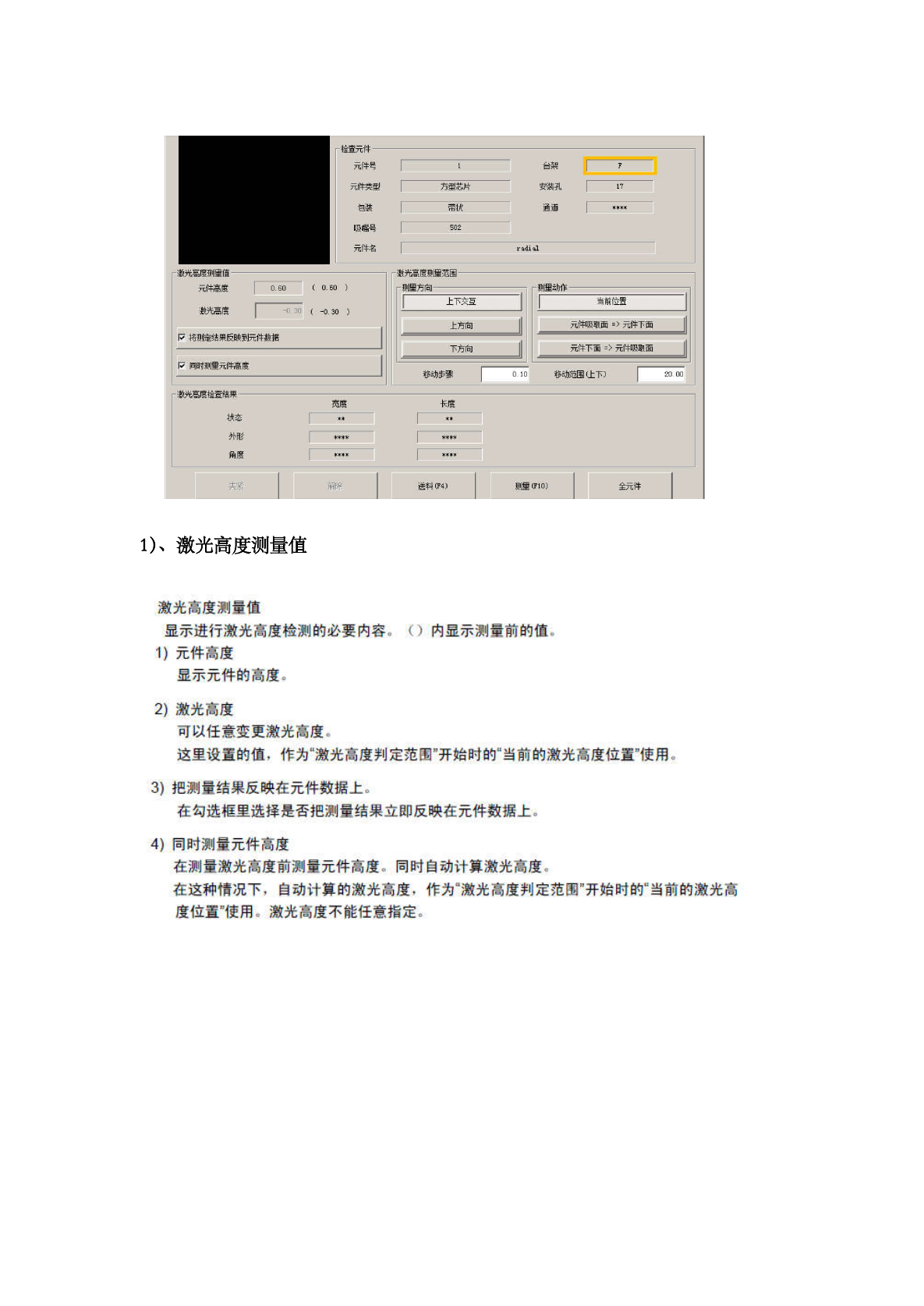
测量动作
、
测量方向
测量动作
a
)
当前位置
从测量激光髙度值中设置的
“
激光高度
"
值开始
.
按设置的范围反复进行测詈
激光定心成功后
,
测量即告结束
。
b
)
元件吸取面
=
>
元件下面
c
)
元件下面
=
>
元件吸取面
在激光高度判定值所显示的值之外
.
另行对元件的高度范围进行测量
开始点可从元件吸取面
.
或元件下面开始
。
内容
测量动作
(
开始点
)
测量方向
从当前位置开始上下交互进行连续检查
。
上下交互
当前位
M
从当前位置开始仅向上方向进行连续检查
i
上方向
从当前位
i
开始仅向下方向进行连续检查
u
下方向
元件吸取面
-
>
元件下面
以元件高度为基础
.
从元件吸取面到元件下面
进行连续检査
-
元件下面
-
>
元件吸取面
以元件高度为基础
.
从元件下面到元件吸取面
进行连续检查
i
3
)
、
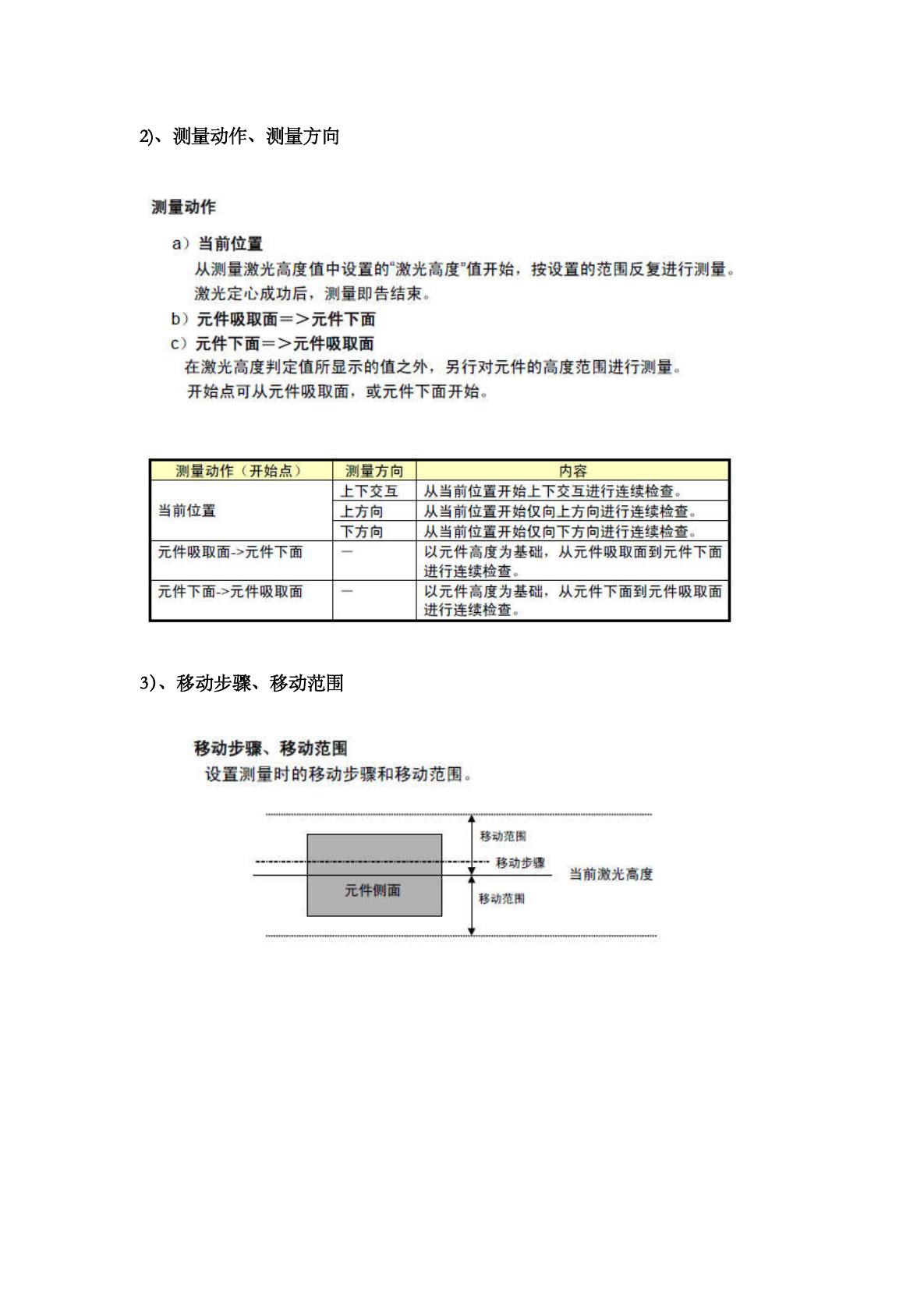
移动步骤
、
移动范围
移动步骤
、
移动范围
设置测暈时的移动步骤和移动范围
:
,
袪动范苗
:
-
移动步皤
当前激光
度
元件侧面