深度解析JUKI设备调试.pdf - 第44页
间距 带 宽 选择带子的传送间距 . o ^ m 当带子为 12 mm 88 mm 时 , 请根据带状供料器的传送间 距来设置元件数据的间距 间 距 : 口 : 判 例 ) 将 1 2 mm 的带子以 8 mm 的间距传送时 8 mm ( 4 * 2 ) 间距 = 8 mm < 传送量 4 mmx 2 回 ) ② Tmy 盘的输入 元件数掮 基板数掮 吸取数掮 | * 吸取条件 | I I ! * 贴片条件 * 检查 * 检查 2…
PL PW H
L W LH
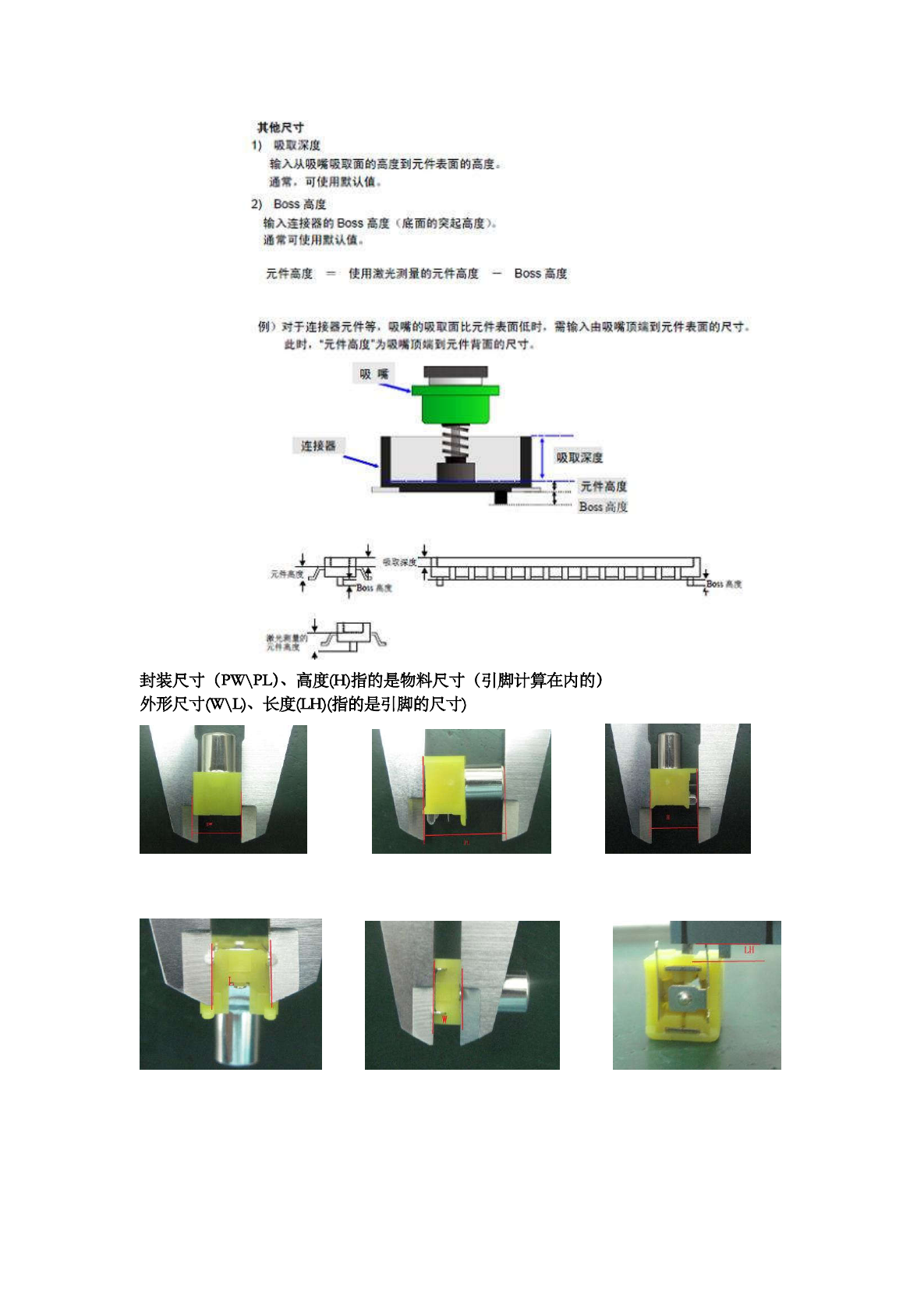
其他尺寸
1
)
吸取深值
瑜入从吸嘴吸取面的芸度到元佟表面的离度
:
可俛用
《
认俏
通篥
.
Boss
离度
2
)
输入逭接器的
Boss
褢度底面的突起高度
通
m
可使用
IK
认值
.
元伶裏度一使用激光渕翬的元件高度
Boss
s
度
例
>
荇子连技
》
元件等
.
吸嘴的吸取面比元件表面低莱输入由吸嘴项钱到元件亵面的尺寸
欽时
.
-
元件豳坩
”
为
噶劢元件鳍
*
的尺寸
ROI
连裱
》
吸取深度
:
元件高皮
Boss
A
.
/
A
I
*
5
深
Ann
彝
,
7
^
褰戈
Jri
tLJU
UIJ
UUUUL
-
rU
UUULJi
□
\
!
;
:
r
£
[
I
封装尺寸
(
PW
\
PL
)
>
高度
(
H
)
指的是物料尺寸
(
引脚计算在内的
)
外形尺寸
(
W
\
L
)
、
长度
(
LHX
指的是引脚的尺寸
)
Laj
iai
mj
间距
带 宽
选择带子的传送间距
.
o
^
m
当带子为
12
mm
88
mm
时
,
请根据带状供料器的传送间
距来设置元件数据的间距
间 距
:
口
:
判
例
)
将
1 2
mm
的带子以
8
mm
的间距传送时
8
mm
(
4
*
2
)
间距
=
8
mm
<
传送量
4
mmx
2
回
)
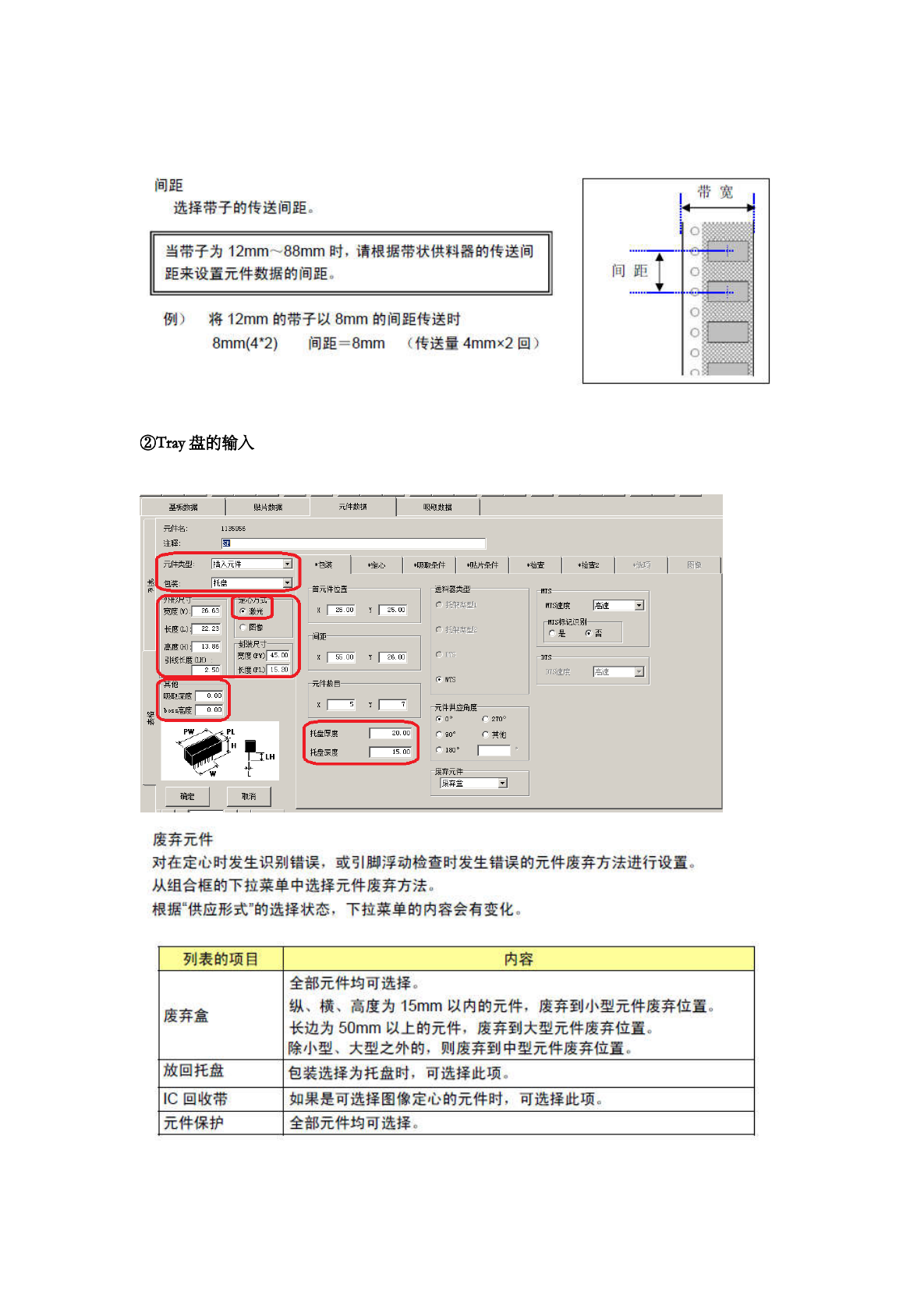
②
Tmy
盘的输入
元件数掮
基板数掮
吸取数掮
|
*
吸取条件
|
I
I
!
*
贴片条件
*
检查
*
检查
2
图像
首亓件位
g
—
X
|
26.00
^
•
澉光
J
r
托架类型
1
|
25.00
^
Cl
)
:
|
26.63
长
JfOOj
22.23
高度
00
|
13.86
引线长
J
!
吸取深度
I
0
00
boss
高度
I
0
00
|
45.00
11
^
20
X
|
55.00
I
|
26.00
rTtffisa
——
I
~
'
托盘深度
废弃元件
对在定心时发生识别错误
.
或引脚浮动检查时发生错误的元件废弃方法进行设置
从组合框的下拉菜单中选择元件废弃方法
。
根据
“
供应形式
"
的选择状态
.
下拉菜单的内容会有变化
,
列表的项目
内容
全部元件均可选择
t
纵
、
横
、
高度为
15
mm
以内的元件
.
废弃到小型元件废弃位置
长边为
50
mm
以上的元件
,
废弃到大型元件废弃位置
.
除小型
、
大型之外的
.
则废弃到中型元件废弃位置
.
废弃盒
放回托盘
包装选择为托盘时
.
可选择此项
IC
回收带
如果是可选择图像定心的元件时
,
可选择此项
.
元件保护
全部元件均可选择
.
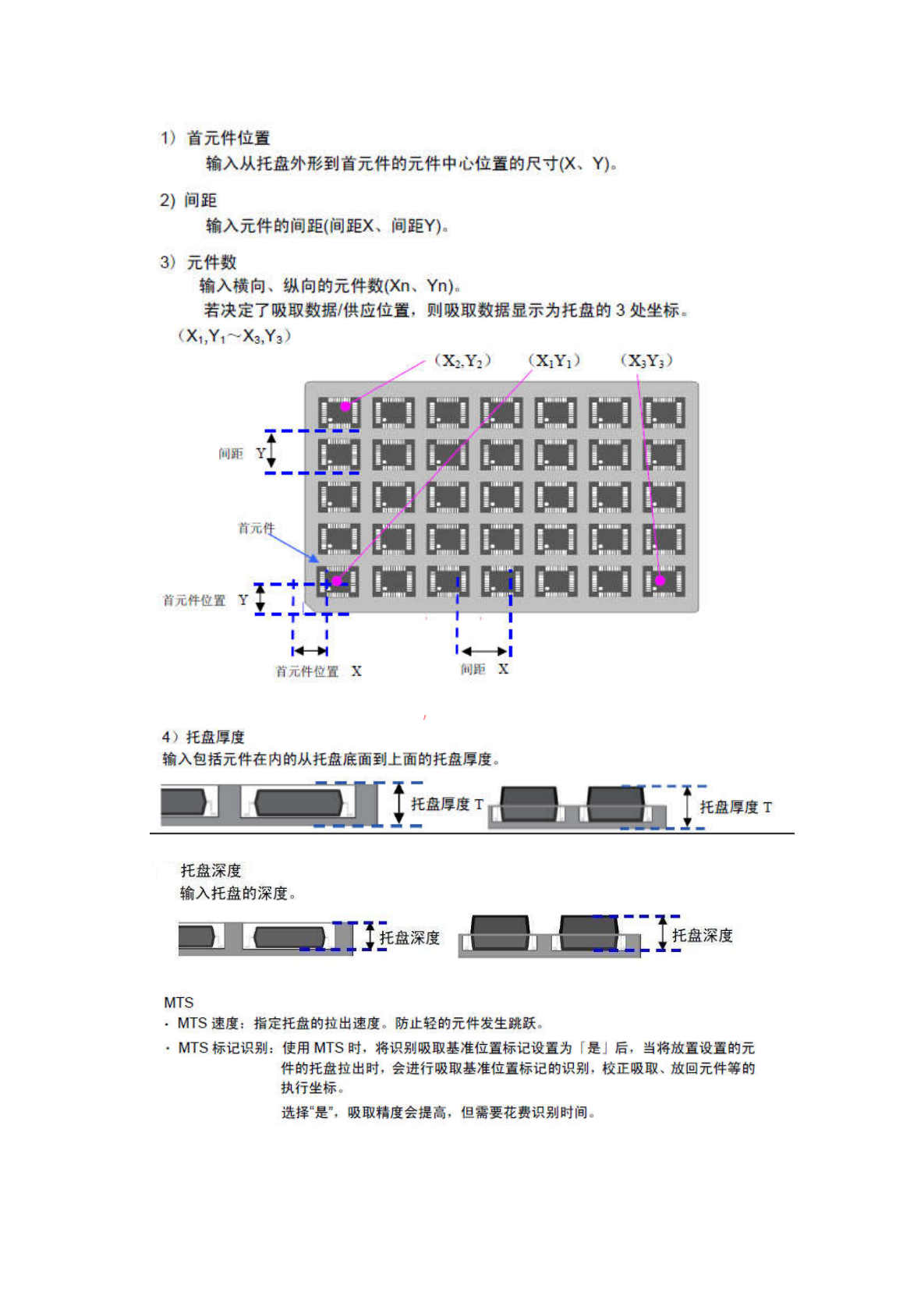
1
)
首元件位
M
输入从托盘外形到首元件的元件中心位
M
的尺寸
(
X
-
Y
卜
2
)
间距
输入元件的间距
(
间距
X
-
间距丫
)
.
:
3
)
元件数
辕入横向
.
纵向的元件数
(
XrK
Yn
)
„
若决定了吸取数据
/
供应位置
.
则吸取数据显示为托盘的
3
处坐标
=
0
CI
]
Y
^
3
]
微
/
(
X
2
:
YI
)
(
XIYI
>
<
X
3
Y b
)
■
關
In
OH
關
EH
HB
.
IH
HQ
HRO
HQ
■
晒
HO
卿
PijO
國
DM
圖
■
了
'
-
^
1
丁
^
j
N
距
Y
,
扦元件位
S
Y
rt
—
N
阿元件位置
X
X
4
)
托盘厚度
输入包括元件在内的从托盘底面到上面的托盘厚度
。
L
;
托盘厚度
T
托盘深度
输入托盘的深度
。
1
托盘深度
MTS
•
MTS
速度
:
指定托盘的拉出速度防止轻的元件发生跳跃
■
MTS
标记识别
:
使用
MTS
时
.
将识别吸取基准位置标记设
M
为
『
是
」
后
,
当将放置设置的元
件的托盘拉出时
,
会进行吸取基准位
S
标记的识别
,
校正吸取
、
放回元件等的
执行坐标
。
选择
“
是
”
.
吸取精度会提高
,
但需要花费识别时间
》