ALeaderAOI-Ver 4.0 - 第153页
上图为 DIP 件的定位注 册窗体图,说明如下: ① ROI 区域: DI P 件的焊盘区域,该区 域为外接焊盘 。 ② 检测算法区域: 【检测算法 】选择“ CR EST ”算法。 子检测项为“定位” 。其他参数见②区 域。 ③ 焊盘极性区域: 【焊盘极性 】选择“非极性 ” 。焊盘的 极性分为三类, 即非极性 、极性和不定向 。 ④ 焊盘形状区域: 【焊盘形状 】选择“椭圆” 。焊盘形状 分为二类,即椭 圆 、矩形。 ⑤ 极性引脚分…
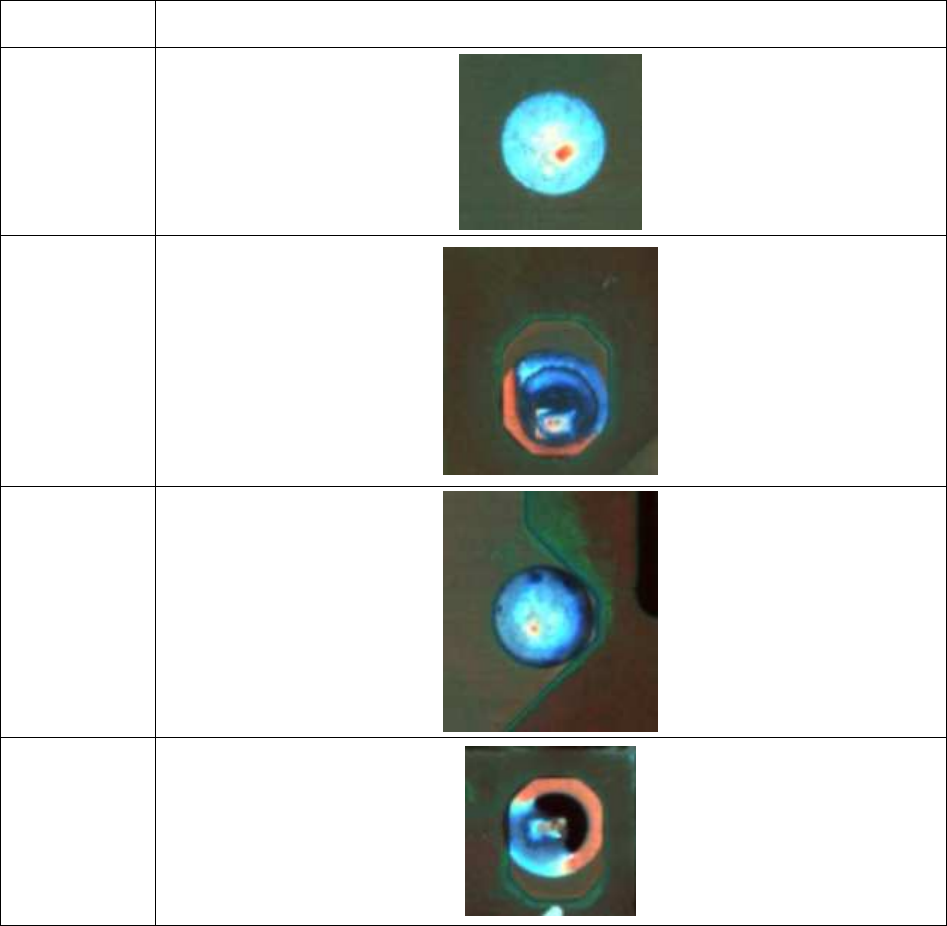
插件的主要缺陷有无引脚,少锡、包脚(包锡)、气孔(锡洞),其中无引脚是指没有插件,或者是插件
的引脚在焊锡面上没有引脚特征;少锡是指插件的焊盘覆锡量不够,或者是外露铜箔;包脚是指插件的引脚
被焊锡包裹;气孔是指插件的孔洞外露。如下图:
缺陷类型
缺陷类型缺陷类型
缺陷类型 图像
图像图像
图像
无引脚
少锡
包脚
气孔
5.2. 光源标准
光源标准光源标准
光源标准
波峰焊的光源亮度标准与炉后检测的光源亮度标准一致,请参考炉后的光源亮度标准。
5.3. 波峰焊的基本检测项
波峰焊的基本检测项波峰焊的基本检测项
波峰焊的基本检测项
5.3.1 插件
插件插件
插件
1) 定位
DIP 件焊盘的定位,区分于 Chip 件的定位方式。Chip 件焊盘的特征为色彩变化大、亮度变化大。对于
此,Chip 件的 Match 算法则不适用于 DIP 件焊盘定位,并且 DIP 件的焊盘大部分为椭圆形。DIP 件的算法采
用提取焊锡成分(二值化),采用形状匹配方式,获取 DIP 件的焊盘位置,其注册窗体如下:
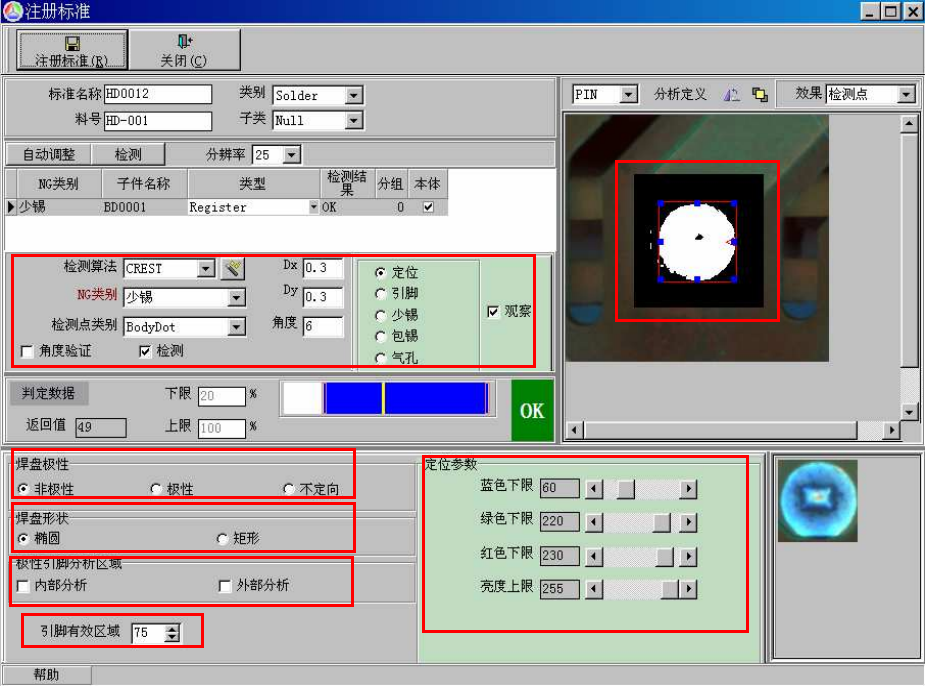
上图为 DIP 件的定位注册窗体图,说明如下:
① ROI 区域:DIP 件的焊盘区域,该区域为外接焊盘。
② 检测算法区域:【检测算法】选择“CREST”算法。子检测项为“定位”。其他参数见②区域。
③ 焊盘极性区域:【焊盘极性】选择“非极性”。焊盘的极性分为三类,即非极性、极性和不定向。
④ 焊盘形状区域:【焊盘形状】选择“椭圆”。焊盘形状分为二类,即椭圆、矩形。
⑤ 极性引脚分析区域:其参数见⑤区域。
⑥ 引脚有效区域:【引脚有效区域】为 75。当焊盘极性为“极性”时,【引脚有效区域】为 40。
⑦ 定位参数区域:【蓝色下限】为 60,【绿色下限】为 220,【红色下限】为 220,【亮度上限】为 255。其参
数解释见<算法详解>中的“CREST”算法。
2) 引脚检测
DIP 件的引脚检测,是指检测 DIP 件中是否存在爬锡区域,而分析爬锡区域,则是通过抽取引脚发生区
域中的引脚成分(爬锡成分)来判定的。其注册窗体如下:
⑥
⑥⑥
⑥
①
①①
①
②
②②
②
③
③③
③
④
④④
④
⑤
⑤⑤
⑤
⑦
⑦⑦
⑦
⑥
⑥⑥
⑥
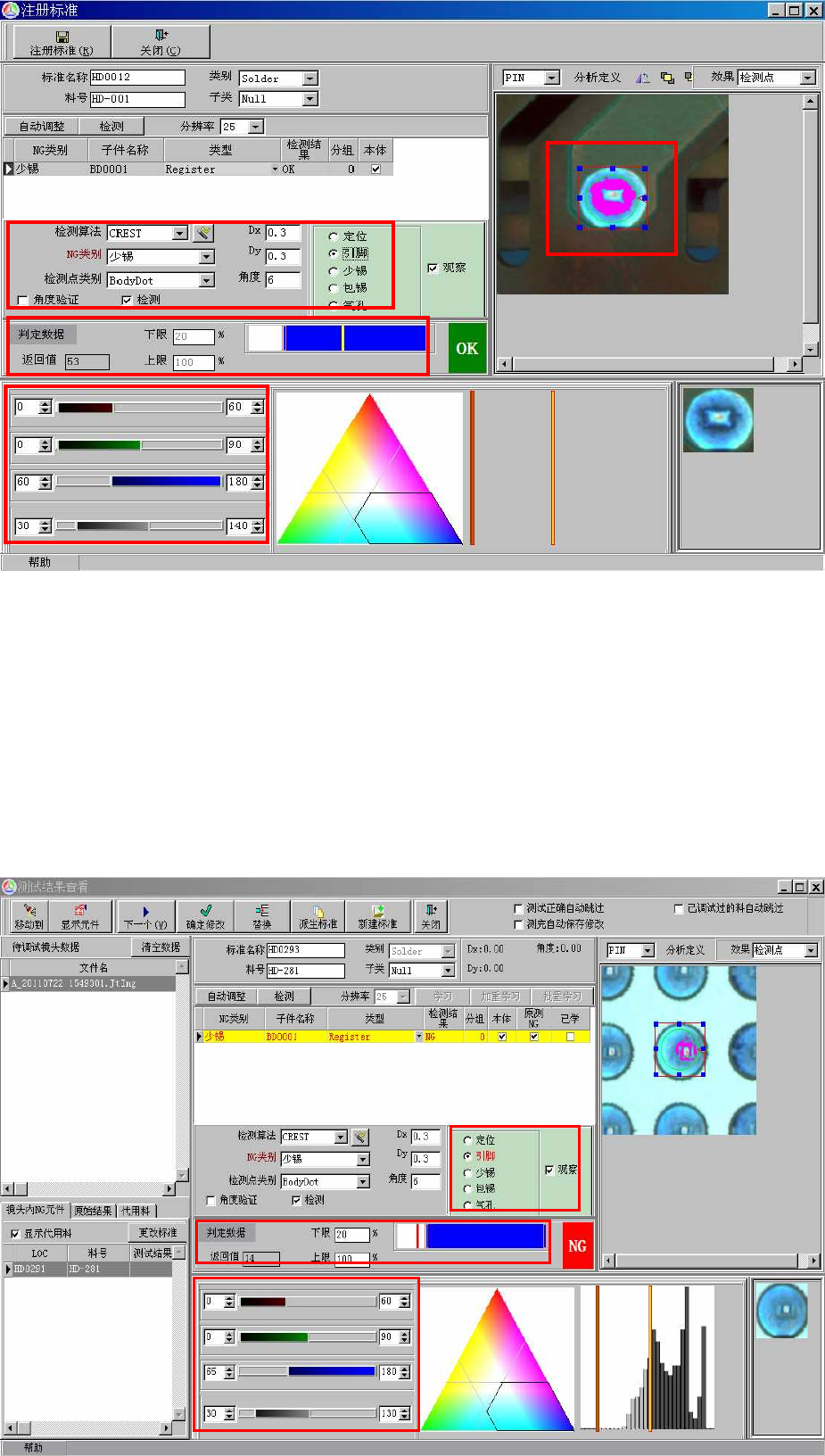
上图为 DIP 件的引脚注册窗体图,说明如下:
① ROI 区域:ROI 区域为焊盘区域的内圆区域,如焊盘中的绿色椭圆区域。
② 检测算法区域:【检测算法】为“CREST”算法,子检测算法为“少锡”。其他参数见②区域。
③ 判定区域:默认判定范围为(20, 100)。
④ 抽色参数区域:引脚的默认抽色参数为红色(0, 60),绿色(0, 90),蓝色(65, 180),亮度(30,
255)。
当引脚发生误报时,是指由于参数限制太严,导致插件能够具备引脚的以“误报”的形式报出,增加了
误报。其表现如下:
①
①①
①
②
②②
②
③
③③
③
④
④④
④
①
①①
①
②
②②
②
③
③③
③