TR7500E_Manual_ch_v28 - 第152页
第 三 章、 A T PG 功 能 介紹 T R 7500 E 使用手冊 1 44 4 . 取得 進板 角度 、 尋找 定 位 元件 ( G e t B oar d Ro t a te A n g l e , F i n d D ummy C o mp onen t Po s iti on ) 4 . 1 . 設定 ( S e t ) l 此步驟 中 ,在 工具 列之 [ 設定 ] 可以 設定 [ 進板 方向 ] 及 [ 停 板位置 ]…
第三章、ATPG 功能介紹
TR7500E 使用手冊
143
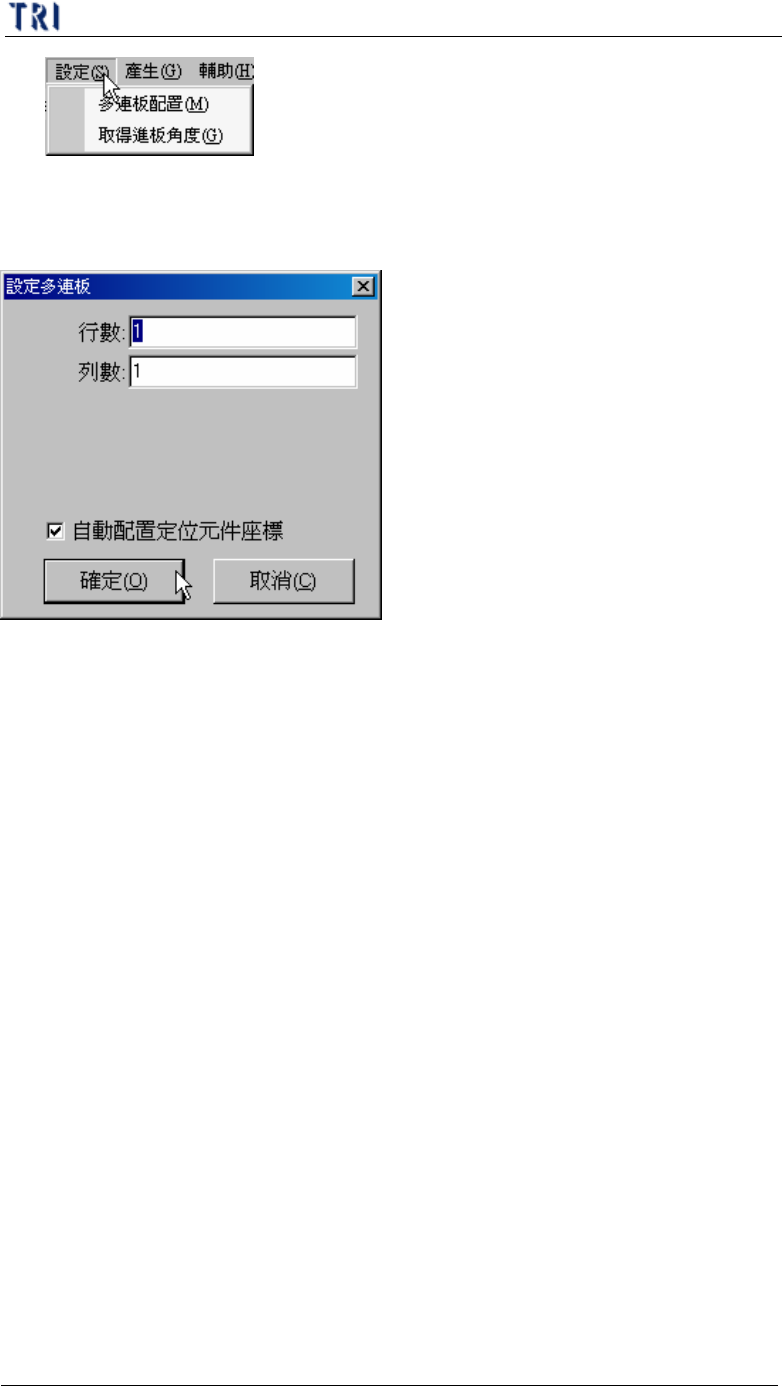
3.1.1. 多連板配置
l 按下[多連板配置]功能,會出現[設定多連板]視窗,以重新設定多連板的行
數及列數。
3.1.2. 取得進板角度
l 按下[取得進板角度],會出現[取得進板角度]視窗,在此可以重新進行計算
進板角度的五個步驟。
3.2. 產生(Generate)
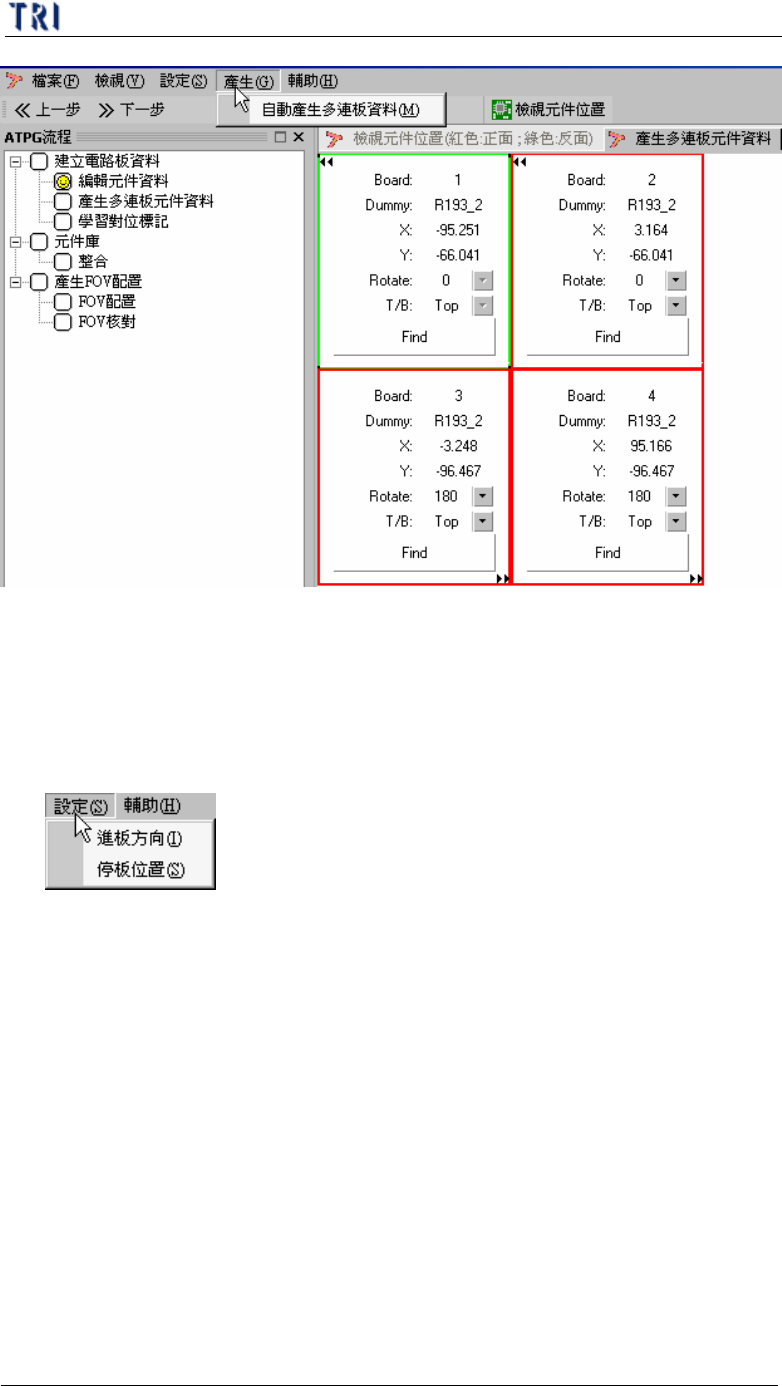
3.2.1. 自動產生多連板資料
l 此步驟中,在工具列之[產生]可以設定[自動產生多連板資料]。在每一連板
的定位元件都已設定完成後,可以按下本按鈕,系統即可自動產生多連板元
件資料。若不使用此按鈕生成多連板資料,也可以在每一連板的定位元件都
已設定完成後,按[下一步],系統亦會詢問是否要自動產生多連板資料。
第三章、ATPG 功能介紹
TR7500E 使用手冊
144
4. 取得進板角度、尋找定位元件(Get Board Rotate Angle, Find
Dummy Component Position)
4.1. 設定(Set)
l 此步驟中,在工具列之[設定]可以設定[進板方向]及[停板位置],以告知系統
電路板目前所在位置。本功能第一次設定後,即不需要每次製做程式時再次
設定,只有在改變進板方向或移動停板感測器時才需要再重新設定。[進板
方向]與[停板位置]設定完成後,系統在尋找第一個定位元件時,可以依據定
停板位置與 CAD 資訊移動到元件附近的位置,若[進板方向]與[停板位置]
設定不正確,並不會影響檢測結果,只是製作程式時需要多花一些時間將攝
影機手動移至正確的位置上。
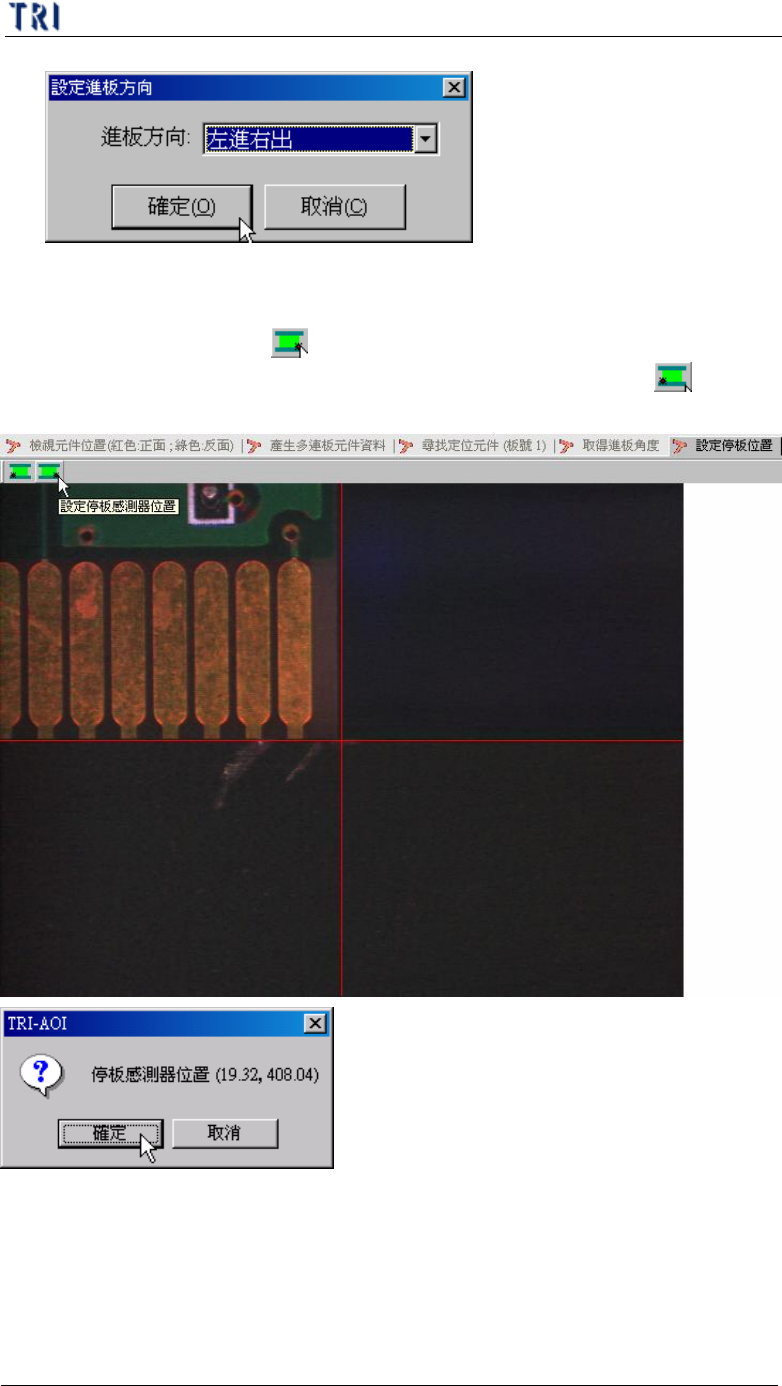
4.1.1. 進板方向
l 設定進板方向為左進或是右進。
第三章、ATPG 功能介紹
TR7500E 使用手冊
145
4.1.2. 停板位置(Stop Position)
l 設定停板的位置。若進板方向為從左邊進板,需先將攝影機移動至電路板之
右下角位置,接著按下 按鈕,設定停板感測器位置。若進板方向為從右
邊進板,需先將攝影機移動至電路板之左下角位置,接著按下 按鈕,設
定停板感測器位置。
5. 學習對位標記
5.1. 設定(Set)