JM-10机器规格书 - 第35页
31 9. 安全性规格 9-1 紧急停止 按下前侧 / 后侧的紧急 停止按钮,可使各轴立即停止,伺服 马达驱动电源可被切断( servo free ) 。 9-2 安全盖 ・ 机器的前后部配备有安全盖,通过安全盖开启开关,可检测开关状态。 在操作面板上设有「维护模式」 「操作模式」的「切换键」 ,可按不同模式切换相应的安 全盖开关动作。 ・ 生产模式 通常时、生产时控制安全盖打开。安全盖打开时,变为 servo free 。 ・ 维护模…
30
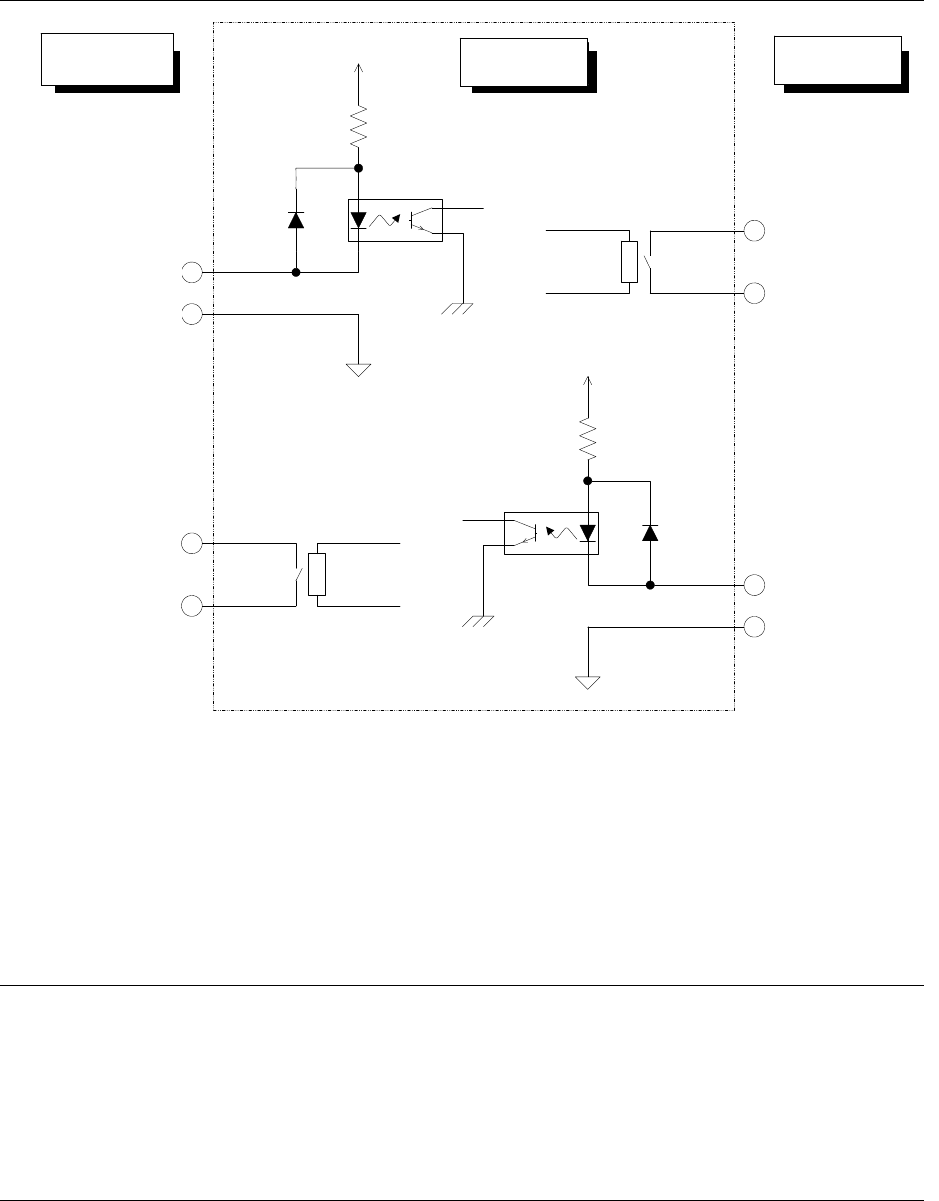
8-2 输入输出信号接口
+24V
リレー接点
+24V
リレー接点
マウンタ下流側装置
ピン番号:1
搬出要求入力信号
ピン番号:2
搬出要求信号コモン
ピン番号:3
搬出許可出力信号
ピン番号:4
搬出許可信号コモン
上流側装置
ピン番号:1
搬出要求出力信号
ピン番号:2
搬出要求信号コモン
ピン番号:3
搬出許可入力信号
ピン番号:4
搬出許可信号コモン
图 信号接口与连接端子
8-2-1
连接电缆规格
遵循 JIS B 8438 产业用机器人-电气装置。电缆长 10m 以内。
8-3 数据接口
相当于 USB2.0 2 端口
数据的接口为连接到 FDD、DVD/CD-ROM 驱动器等。
(USB 连接、选购项)
8-4 实用设施接口
管道接头
φ8×φ12 胶管用单按型管道接头(选购项)
针号:1
输入信号要求搬出
针号:2
公用信号要求搬出
针号:3
输出信号许可搬出
针号:4
公用信号许可搬出
继电器接点
下游装置
贴装装置
上游装置
继电器接点
针号:1
输出信号要求搬出
针号2
公用信号要求搬出
针号:3
输入信号许可搬出
针号:4
公用信号许可搬出
31
9. 安全性规格
9-1 紧急停止
按下前侧/后侧的紧急停止按钮,可使各轴立即停止,伺服马达驱动电源可被切断(servo
free)。
9-2 安全盖
・
机器的前后部配备有安全盖,通过安全盖开启开关,可检测开关状态。
在操作面板上设有「维护模式」「操作模式」的「切换键」,可按不同模式切换相应的安
全盖开关动作。
・
生产模式
通常时、生产时控制安全盖打开。安全盖打开时,变为 servo free。
・
维护模式
安全盖打开状态下可使之低速动作。是进行维护时使用的模式。
9-3 CE标记规格(适用于EN型机器)
遵循下列 EC(European Committee)指令。
・
EC 机械指令 2006/42/EC
・
EC EMC 指令 2004/108/EC
适合规格
・
机械指令
EN ISO12100:2010, EN ISO13849-1:2008/AC:2009, EN60204-1:2006+A1:2009
・
EMC指令
EN 61000-6-4: 2007, EN 55016-1-2: 2004/A1: 2005/A2: 2006,
EN 55016-2-1: 2004/A1: 2005, EN 55016-2-3: 2006, EN 61000-6-2: 2005,
EN 61000-4-2: 2009, EN 61000-4-3: 2006/A1:2008, EN 61000-4-4: 2004,
EN 61000-4-5: 2006, EN 61000-4-6: 2009, EN 61000-4-8: 1993/A1: 2001,
EN 61000-4-11: 2004
32
10. 维护性规格
10-1 故障检修
提供充实的帮助功能,便于发现异常状态的原因,查找解决办法,恢复正常状态。
10-2 校准功能
自我校准真空压力破坏瞬间的时效,达到既定值时,发出清扫警告。
11. 可靠性规格
11-1 装置的使用寿命
5 年,但易损件或以下定期更换元件除外。(详细情况,请参见使用说明书。)
• 气簧
• 过滤器元件
• 光学鼠标
• 气管
• SSD
• HDD 组
• 光导纤维电缆组(裸电缆内)
• 1394
Robot Cable 组
寿命计算标准:
22 小时/日
300 日/年
22×300×5=33,000 小时/5 年