KE-3010A_20VA_20VRA使用说明书.pdf - 第1153页
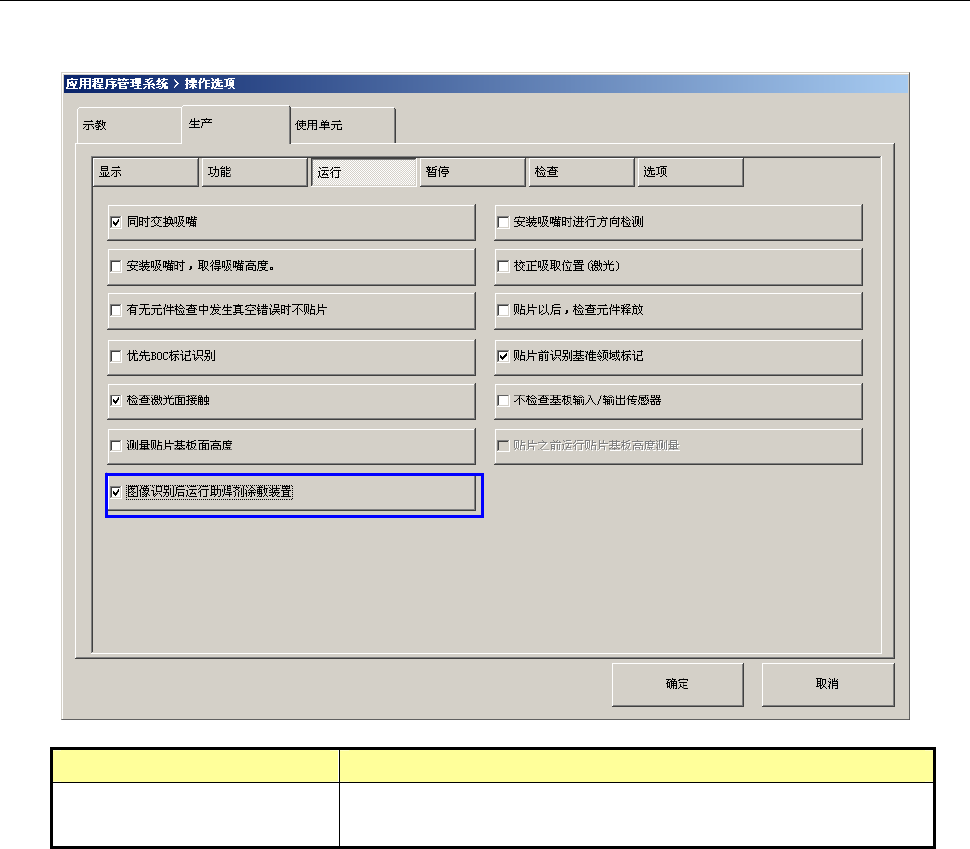
第2部 功能详解篇 第1 3章 选项 组件 13-127 13-18-8 操作选项 以操作选项的 “ 生产(运行) ” 指定生产时助焊剂涂敷装置的动作时机。 项目 内容 图像识别后运行助焊剂涂敷 装置 选择在图像识别前还是识别后运行助焊剂涂敷装置。 初始设定状态为不打钩(图像识别前运行助焊剂涂敷装置) 。
第2部 功能详解篇 第13章 选项组件
13-126
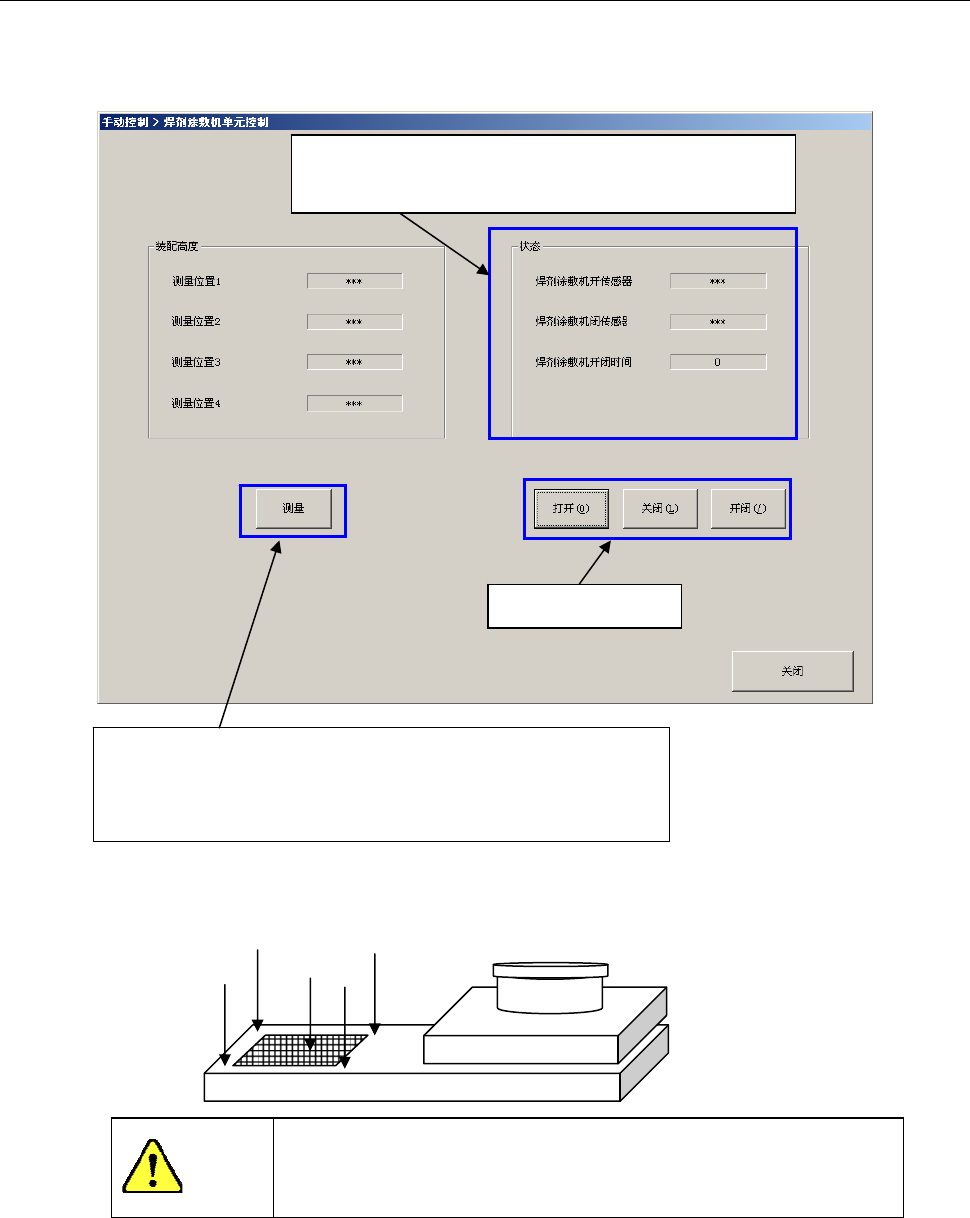
13-18-7 手动控制
能够确认助焊剂槽的装配高度(水平度)和助焊剂涂敷装置的开闭时间。
从手动控制选择「控制」—「其它」—「助焊剂涂敷装置控制」,即显示以下的对话框。
警告
选择「测量」后,轴即移动。
在选择「测量」前务请确认无人在进行设备内部的作业。
显示助焊剂涂敷装置传感器状态以及从助焊剂涂敷
装置开始开闭到被传感器测知的时间。
如选择「测量」,即以 HMS 测量膜槽外侧四个角的高度。
测量结果显示在“装配高度”的各测量位置。
测量值差距出现 0.1mm 以上时,请再次检查装配状态。
进行开闭动作。
<用 HMS 测量高度>
第2部 功能详解篇 第13章 选项组件
13-127
13-18-8 操作选项
以操作选项的“生产(运行)”指定生产时助焊剂涂敷装置的动作时机。
项目 内容
图像识别后运行助焊剂涂敷
装置
选择在图像识别前还是识别后运行助焊剂涂敷装置。
初始设定状态为不打钩(图像识别前运行助焊剂涂敷装置)。
第2部 功能详解篇 第13章 选项组件
13-128
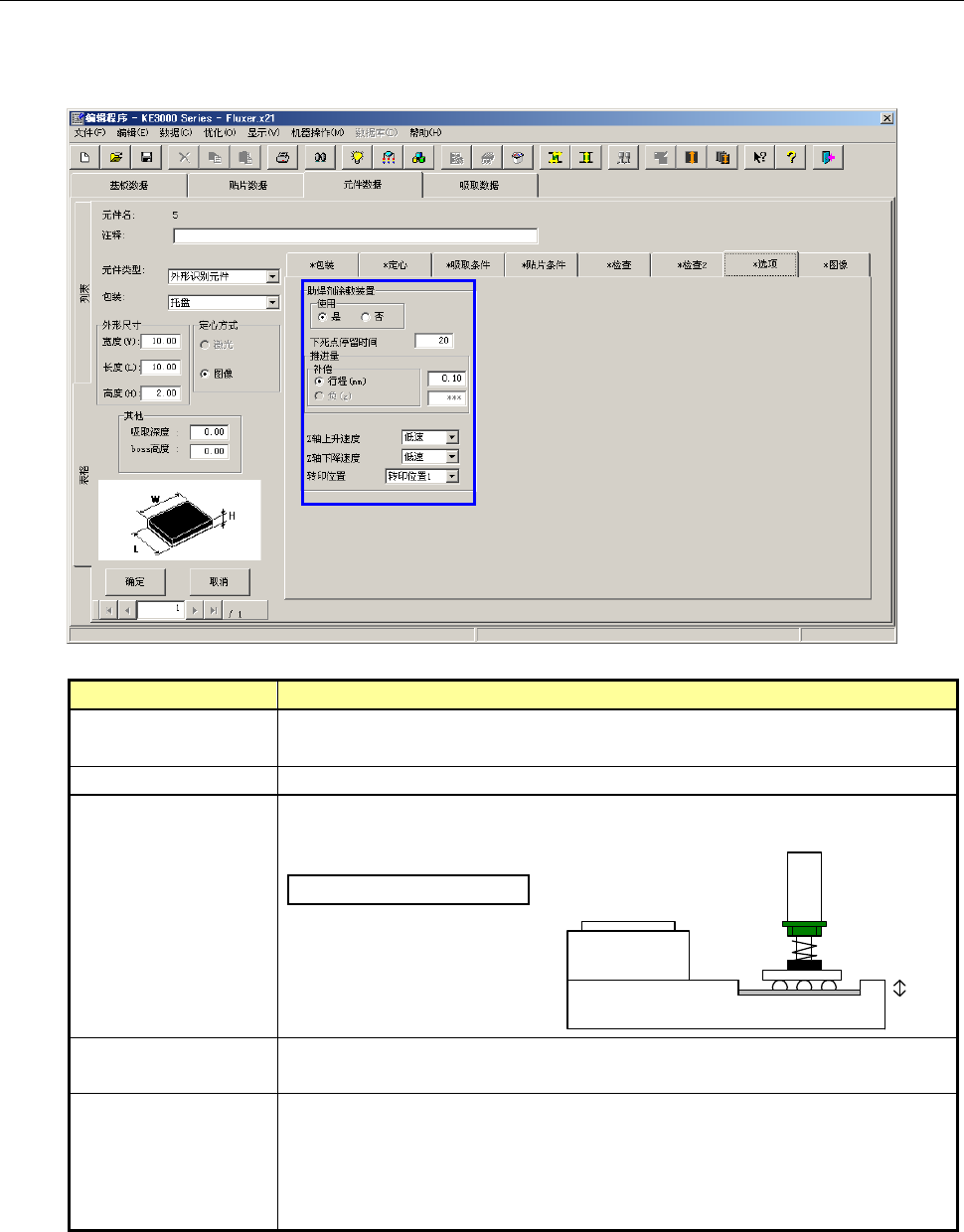
13-18-9 编辑程序
以元件数据的“选项”进行助焊剂涂敷装置的动作设定。
只有定心方式已设为图像的元件可以设定。
项目 内容
使用 对助焊剂涂敷装置动作的使用设定「执行」或「不执行」。
初始设置为「否」。
下死点停留时间 设定助焊剂转印时贴装头的 Z 轴下降后的等待时间。
补偿 设定元件压入助焊剂涂敷装置上面的程度。
(从行程(mm)/负荷(g)选择。)
补偿=t(槽的深度)+α
α: 由于凸点直径是有偏差
的,所以多设定 0.1mm
左右(α=0.1mm)可使助
焊剂的转印量比较稳定。
Z 轴上升/下降速度 设定助焊剂转印时贴装头的 Z 轴上升/下降速度。
(如果被选择的是负荷(g),则下降速度为 FC 速度。)
转印位置 选择助焊剂转印位置 1~4。
选择范围根据机器总体设置中设定的槽的类型而不同。
1槽型:转印位置固定为 1
2槽型:转印位置可从 1、2 中选择
4槽型:转印位置可从 1、2、3、4 中选择
t