KE-3010A_20VA_20VRA使用说明书.pdf - 第1205页
第2部 功能详解篇 第1 3章 选项 组件 13-179 13-23-8 操作选项 在操作选项的 “ 生产(检查) ” 中,指定生产时的旋转型焊锡转印装置各项动作的时机。 项目 内容 焊锡涂布之前的图像识别 仅在焊锡转印前进行图像识别。 不进行焊锡转印的检查。 焊锡涂布之后的图像识别 仅在焊锡转印后进行图像识别。 使用元件数据的焊锡检查阈值,进行焊锡转印检查。 焊锡涂布前后的图像识别 在焊锡转印前后进行图像识别。 使用焊锡转印前的图像识…
第2部 功能详解篇 第13章 选项组件
13-178
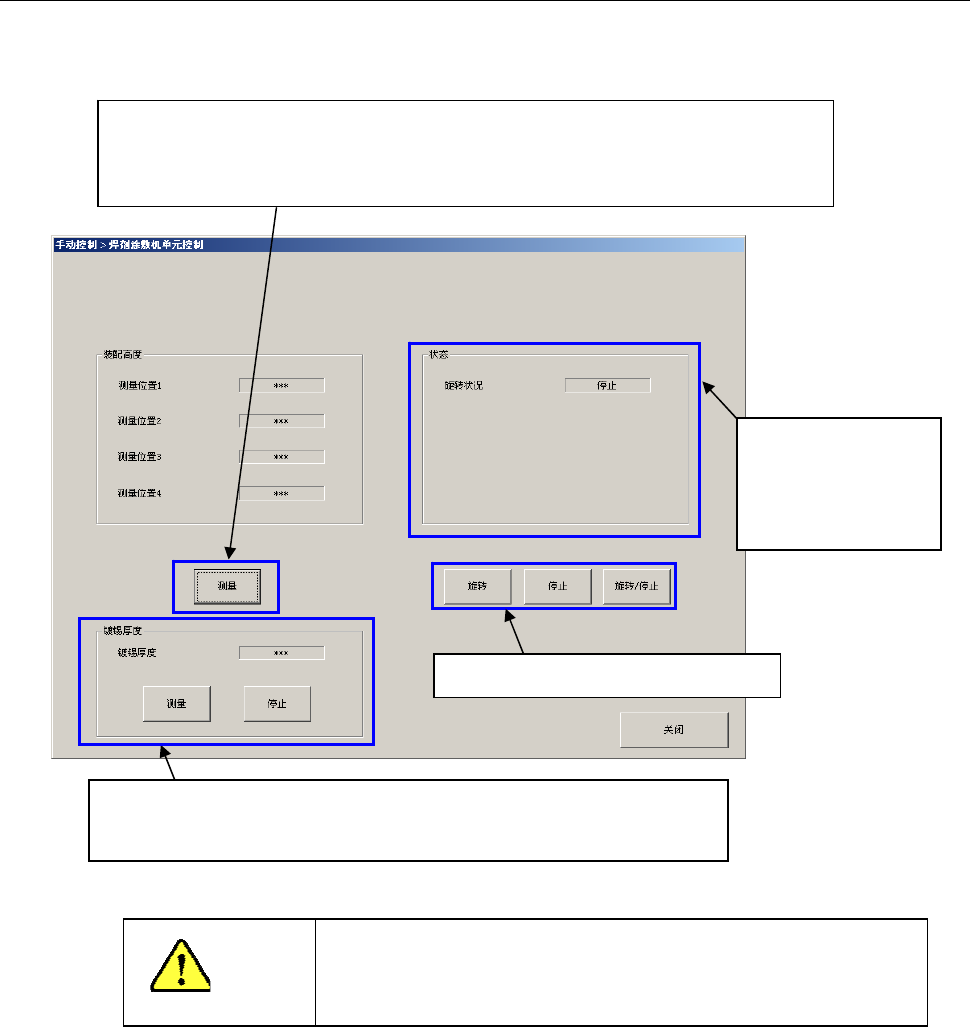
13-23-7 手动控制
手动控制,可用于确认焊锡盘的安装高度(水平度)及焊锡膜厚度,控制焊锡盘的旋转。
在手动控制中选择「控制」-「其他」-「助焊剂涂敷装置单元控制」,显示以下对话框。
选择「测量」,轴即移动。
选择「测量」前,请确认没有人在进行装置内部的作业。
警告
进行焊锡托盘的旋转动作。
选择「测量」,使用 HMS 测量托盘的高度 4 个点。
测量结果显示在“装配高度”的各测量位置中。
如果测量值出现 0.1mm 以上的差,请重新确认安装状态。
显示焊锡托盘旋转
状况。
显示使用 HMS 实时测量的焊锡膜厚值。
按下停止按钮,则停止焊锡膜厚的测量。
第2部 功能详解篇 第13章 选项组件
13-179
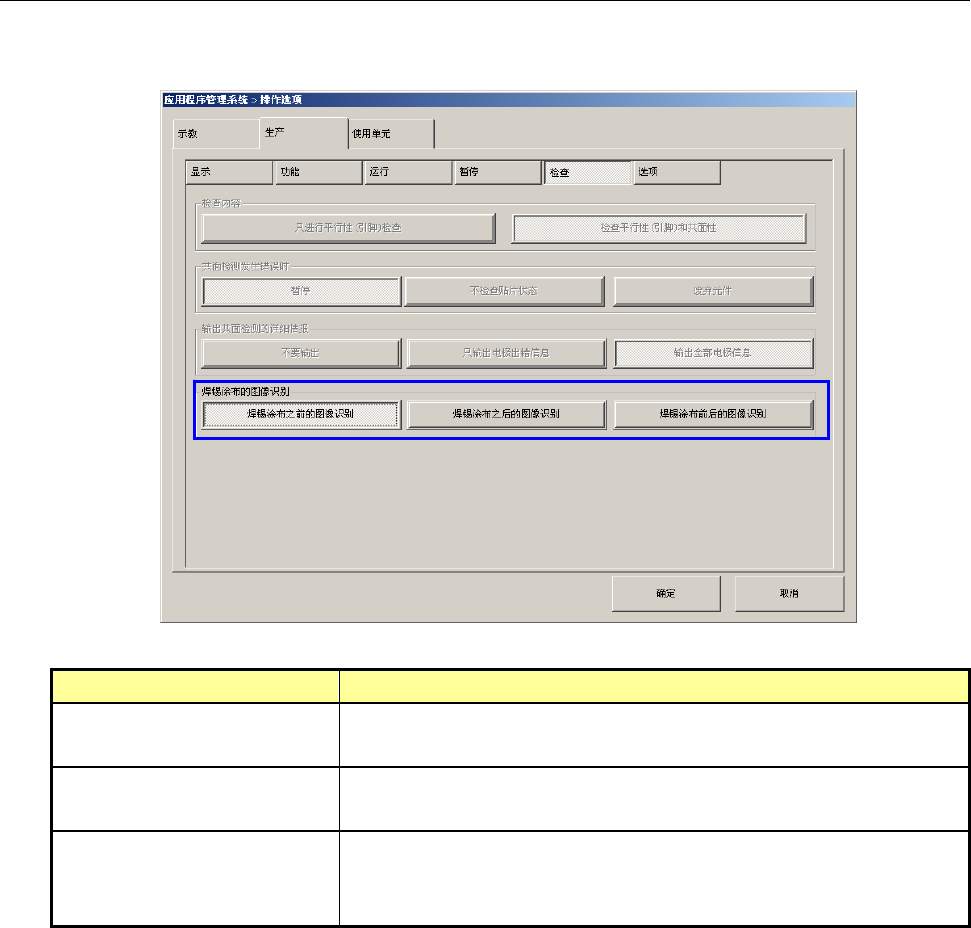
13-23-8 操作选项
在操作选项的“生产(检查)”中,指定生产时的旋转型焊锡转印装置各项动作的时机。
项目 内容
焊锡涂布之前的图像识别 仅在焊锡转印前进行图像识别。
不进行焊锡转印的检查。
焊锡涂布之后的图像识别 仅在焊锡转印后进行图像识别。
使用元件数据的焊锡检查阈值,进行焊锡转印检查。
焊锡涂布前后的图像识别 在焊锡转印前后进行图像识别。
使用焊锡转印前的图像识别中取得的球亮度及焊锡转印后的图像识
别中取得的球亮度,进行焊锡转印的检查。
第2部 功能详解篇 第13章 选项组件
13-180
13-23-9 编辑程序
13-23-9-1 元件数据
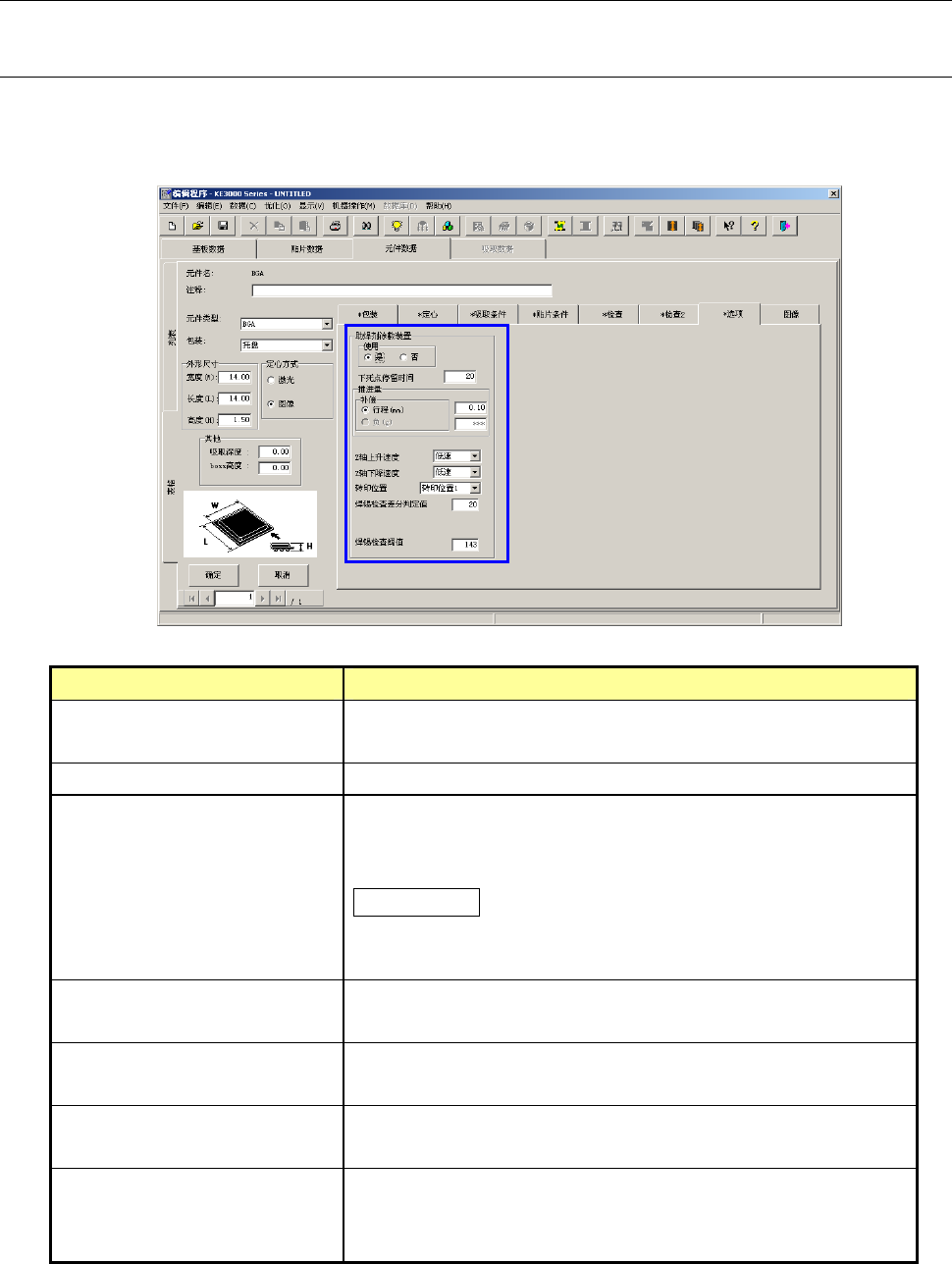
在元件数据的“选项”中,进行旋转型焊锡转印装置动作的设定。
仅定心方式为图像的元件可以设置此项。
项目 内容
使用 设定「是」/「否」使用焊锡转印动作。
初始设定为「否」。
下死点停留时间 设定焊锡转印时,Head 的 Z 轴下降后的等待时间。
推进量 设定对于沟的底面,将元件推进多深。
(从行程(mm)/负荷(g)中选择。)
推进量 = α
α: 由于突起直径分散,设定为约 0.1mm(α=0.1mm),助焊
剂转印量即可稳定。
Z 轴上升/下降速度 设定焊锡转印时 Head 的 Z 轴上升/下降速度。
(选择负荷(g)输入时,下降速度会变为 FC 速度。)
转印位置 选择焊锡转印位置。
・
转印位置固定为 1
焊锡检查差分判定值 设定在生产动作中焊锡涂覆前后进行图像识别时,检查时使用
的阈值。数字越大检查越严格,默认值为 20。
焊锡检查阈值 设定在生产动作中仅在焊锡涂覆后进行图像识别时,检查时使
用的阈值。
默认值为 143