KE-3010A_20VA_20VRA使用说明书.pdf - 第453页
第 1 部 基本篇 第 4 章 制作生产程序 4-57 (7) 定心方式 指定求出元件中心的方法。 请按照元件进行选择(在考虑到规格、精度、节拍速度的基础上) 。 。 但是,根据元件类型,可使用的定心方式是有限制的 元件类型 激光 图像 元件类型 激光 图像 方形芯片 ○ × TSOP2 ○ ○ 方形芯片 (LED) ○ × BGA ○ ○ 圆筒型芯片 ○ × FBGA × ○ 铝电解电容 ○ ○ QFN ○ ○ SOT ○ × 外形识…
第 1 部 基本篇 第 4 章 制作生产程序
4-56
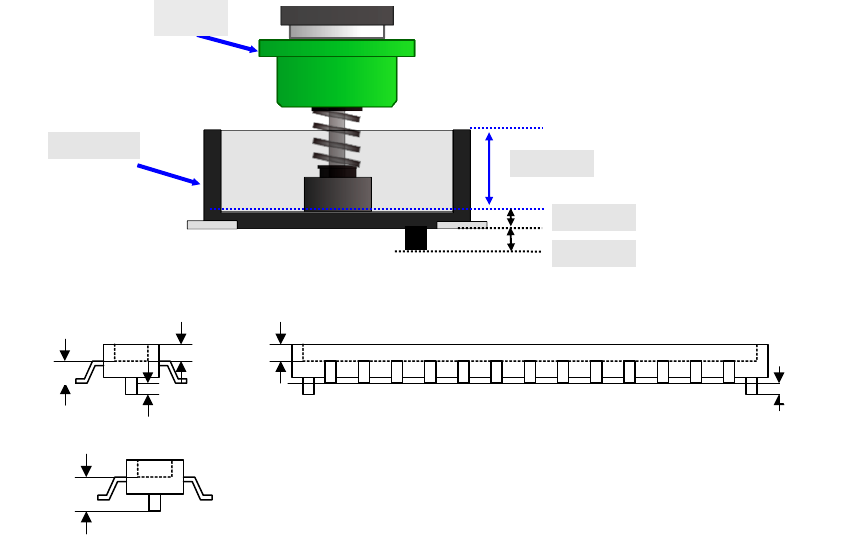
(6)其他尺寸
1) 吸取深度
输入从吸嘴吸取面的高度到元件表面的高度。
通常,可使用默认值。
2) Boss 高度
输入连接器的 Boss 高度(底面的突起高度)。
通常可使用默认值。
元件高度 = 使用激光测量的元件高度 - Boss 高度
例)对于连接器元件等,吸嘴的吸取面比元件表面低时,需输入由吸嘴顶端到元件表面的尺寸。
此时,“元件高度”为吸嘴顶端到元件背面的尺寸。
元件高度
吸取深度
吸嘴
Boss 高度
连接器
元件高度
吸取深度
Boss 高度
Boss 高度
激光测量的
元件高度
第 1 部 基本篇 第 4 章 制作生产程序
4-57
(7) 定心方式
指定求出元件中心的方法。
请按照元件进行选择(在考虑到规格、精度、节拍速度的基础上)。
。
但是,根据元件类型,可使用的定心方式是有限制的
元件类型 激光 图像 元件类型 激光 图像
方形芯片 ○ ×
TSOP2
○ ○
方形芯片(LED) ○ ×
BGA
○ ○
圆筒型芯片 ○ ×
FBGA
× ○
铝电解电容 ○ ○
QFN
○ ○
SOT
○ × 外形识别元件 × ○
微调电容器 ○ × 通用图像元件 × ○
网络电阻 ○ × 单向引脚连接器 ○ ○
SOP
○ ○ 双向引脚连接器 ○ ○
HSOP
○ ○ Z 形引脚连接器 ○ ○
SOJ
○ ○ 扩展引脚连接器 × ○
QFP
○ ○ J 引脚插座 ○ ○
GaAsFET
○ ○ 鸥翼式插座 ○ ○
PLCC
○ ○ 带减震器的插座 ○ ○
PQFP
○ ○ 其他元件 ○ ×
TSOP
○ ○
(8) [确定]按钮、[取消]按钮
按[确定]按钮:保存已编辑的内容,退出表格画面。
按[取消]按钮:废弃已编辑的内容,退出表格画面。
退出表格画面时,如果是从贴片数据画面转移过来的,就返回到贴片数据画面;如果是从元件列表
画面转移过来的,就返回到元件列表画面。
不是通过按钮退出表格画面时(例如通过菜单命令转移到其他画面,或通过选择选项卡转移到其他
对话框),与按[确定]按钮时的处理相同。
第 1 部 基本篇 第 4 章 制作生产程序
4-58
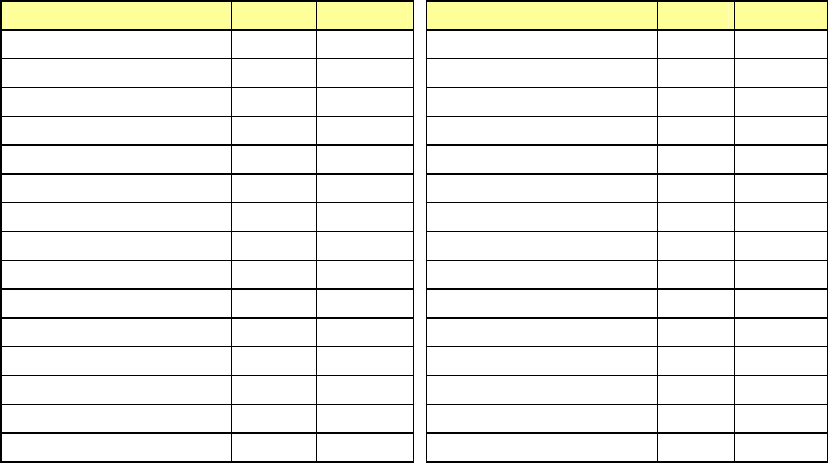
4-3-5-2-2 包装
(1) 带状的输入方法
1) 供应设备
列表框内会显示可选择的供应装置的一览表。从该一览表里选择1个。
2) 间距
选择带子的传送间距。
当带子为 12mm~88mm 时,请根据带状供料器的传送间
距来设置元件数据的间距。
例) 将 12mm 的带子以 8mm 的间距传送时
8mm(4*2) 间距=8mm (传送量 4mm×2 回)
有关带状供料器的设置,请参见“带状供料器使用说明书”。
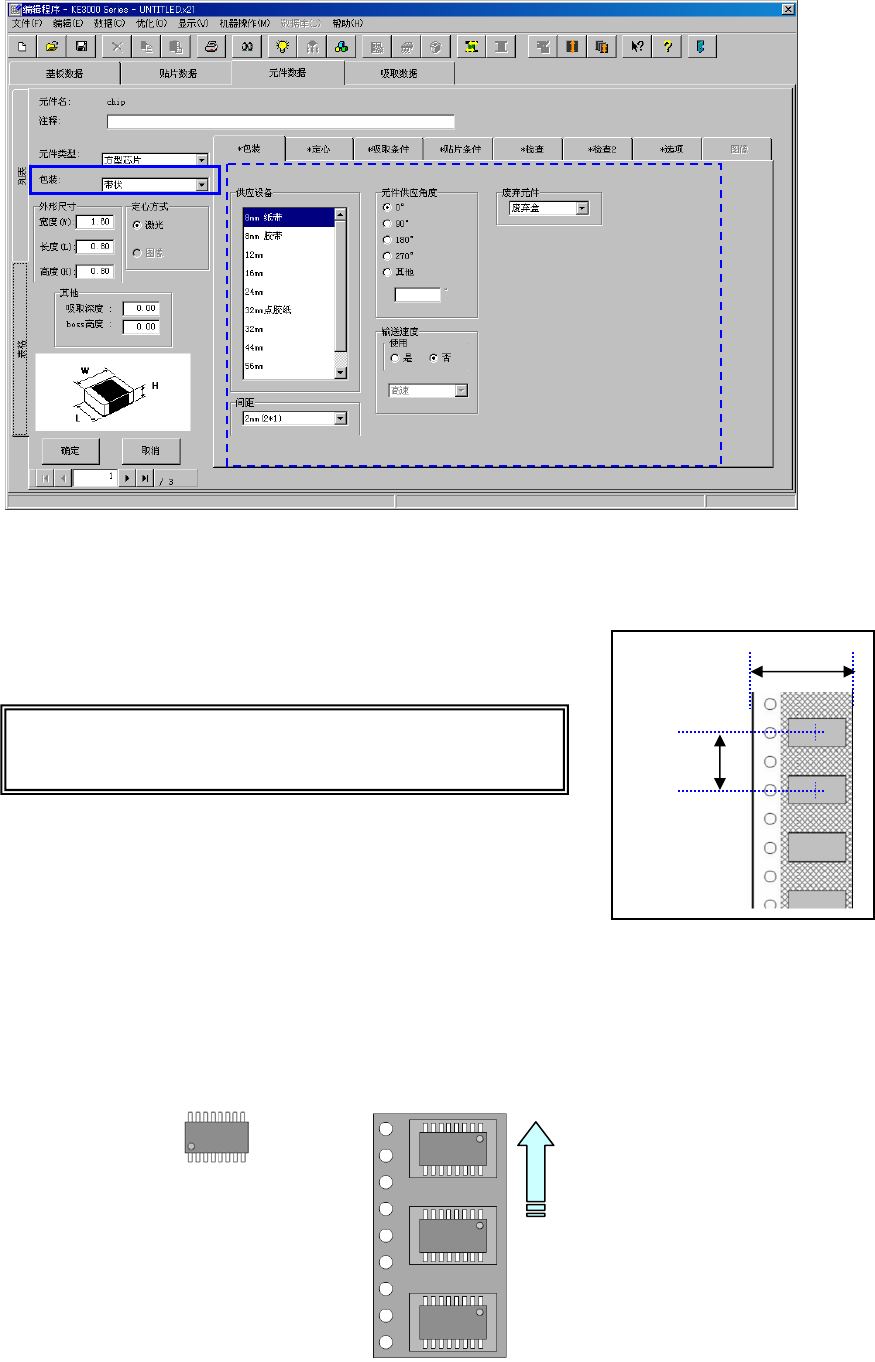
3) 元件供应角度
以JUKI的元件供应角度为0°,选择带状供料器上的元件包装姿势与之形成的角度。
选择「其他」
。
时,请在编辑框内输入角度 (0°~ 359.9875°)
传送方向
角度定义 0° 供应角度 180°
带宽
间距