KE-3010A_20VA_20VRA使用说明书.pdf - 第609页
第 1 部 基本篇 第 4 章 制作生产程序 4-213 4-5-4-2-2 测量种类 各种测量项目的功能概要如下表所示。 测量项目 测量内容 备注 元件尺寸 ( 纵横 ) 测量实际的元件外形尺寸 元件横方向 元件纵方向 自动计算最适合的吸嘴编号 吸嘴编号 吸取时的真空压力 测量实际的元件吸取时的真空压力 元件高度 测量实际的元件高度 元件高度 自动计算最适合的激光定心值 仅图像定中心 激光高度 芯片站立判定值 引脚尺寸 测量实际的引脚…
第 1 部 基本篇 第 4 章 制作生产程序
4-212
4-5-4-2 测量
在Head上安装实际元件,用激光或图像执行测量后,把其数据反映到生产程序的功能。
注意
为了避免人身伤害,在机器运行过程中,切勿将手和头伸入装置内部。
4-5-4-2-1 测量模式
有「连续测量」和「单独测量」2种测量模式。
可选择菜单切换运行模式。
以下为各模式的功能。
测量子菜单 运行模式 运行内容
单独 单独测量 测量元件画面表格中显示的元件。
连续 连续测量
测量生产程序数据内所有元件/条件一致的元件。
测量中因某种原因测量失败的元件可进行单独测量。
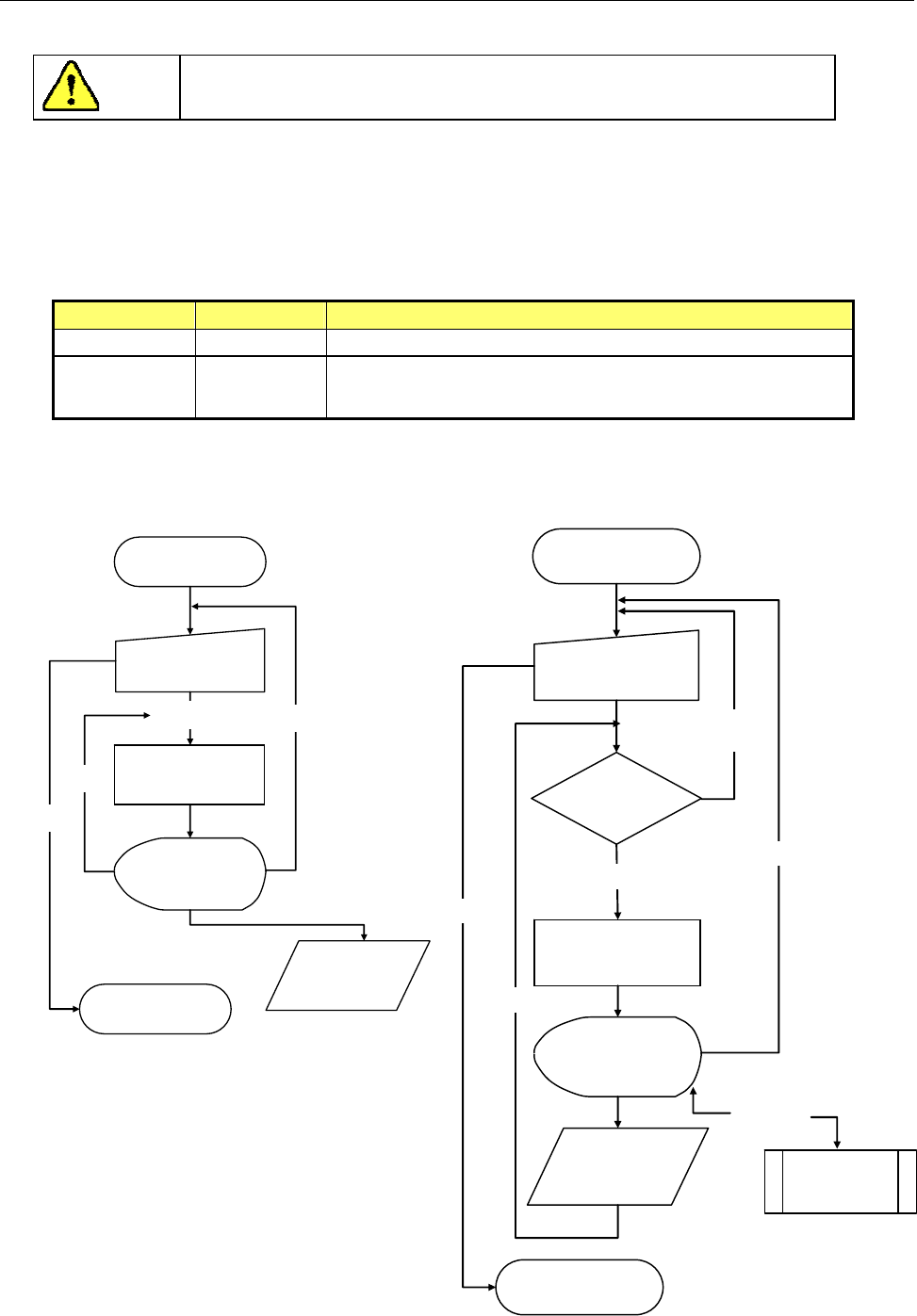
以下为各测量模式的处理运行概要流程图。
连续测量开始
条件设定
(对话框)
结果存入
生产程序
显示结果
(对话框)
测量
有测量对象
元件吗?
详细测量
连续测量结束
单独测量
有对象元件
中止
无对象元件
测量下一个元件
结束
单独测量开始
条件设定
(对话框)
中止
开始测量
测量
显示结果
(对话框)
结果存入
生产程序
单独测量结束
结束
・
单独测量流程图
・
连续测量流程图
重测
第 1 部 基本篇 第 4 章 制作生产程序
4-213
4-5-4-2-2 测量种类
各种测量项目的功能概要如下表所示。
测量项目 测量内容 备注
元件尺寸(纵横)
测量实际的元件外形尺寸
元件横方向
元件纵方向
自动计算最适合的吸嘴编号
吸嘴编号
吸取时的真空压力 测量实际的元件吸取时的真空压力
元件高度
测量实际的元件高度
元件高度
自动计算最适合的激光定心值
仅图像定中心
激光高度
芯片站立判定值
引脚尺寸
测量实际的引脚尺寸
仅激光定中心
引脚间距
引脚长度
引脚个数/欠少信息
CDS 高度
(仅 KE-3020VA)
CDS 高度
图像识别元件时
可以测量
(1) 测量项目的各种功能
1) 元件尺寸测量功能
通过激光及图像识别装置测量元件的纵横尺寸。
同时自动计算最适合的吸嘴编号。测量方式如下所示。
对象元件 方式
激光识别元件 ①用激光获得当前的元件角度
↓
②将 θ 旋转到 0 度,以激光宽度作为横向尺寸
↓
③将 θ 旋转到 90 度,以激光宽度作为纵向尺寸
图像识别元件 ①用图像识别装置识别元件获取元件外形尺寸。
↓
②以应答后获得的值作为纵横尺寸。
2) 元件高度测量功能
用激光测量元件高度。同时自动计算最适合的激光高度及芯片站立判定值。
测量方式如下所示。
对象元件 方式
激光识别元件
图像识别元件
①上下移动元件。
↓
②将元件有阴影的范围作为高度尺寸。
3) 元件真空压力测量功能
测量吸取元件时的真空压力。测量方式如下所示。
对象元件 方式
激光识别元件
图像识别元件
①吸取元件,获得 Head 真空压力级别。
↓
②将获得的值作为 Head 真空级别。
第 1 部 基本篇 第 4 章 制作生产程序
4-214
4) 引脚信息测量功能
利用图像识别装置测量引脚信息。仅限于图像定中心的元件进行测量。测量方法如下。
对象元件 方式
图像识别元件 ①利用图像识别装置识别元件获取引脚信息。
↓
②将获得的值作为引脚尺寸。
5) CDS 高度测量功能(仅 KE-3020VA)
用激光测量 CDS 高度。测量方法如下所示。
对象元件 方式
图像识别元件 ①上下移动元件。
↓
②将元件的阴影部分范围作为高度尺寸。
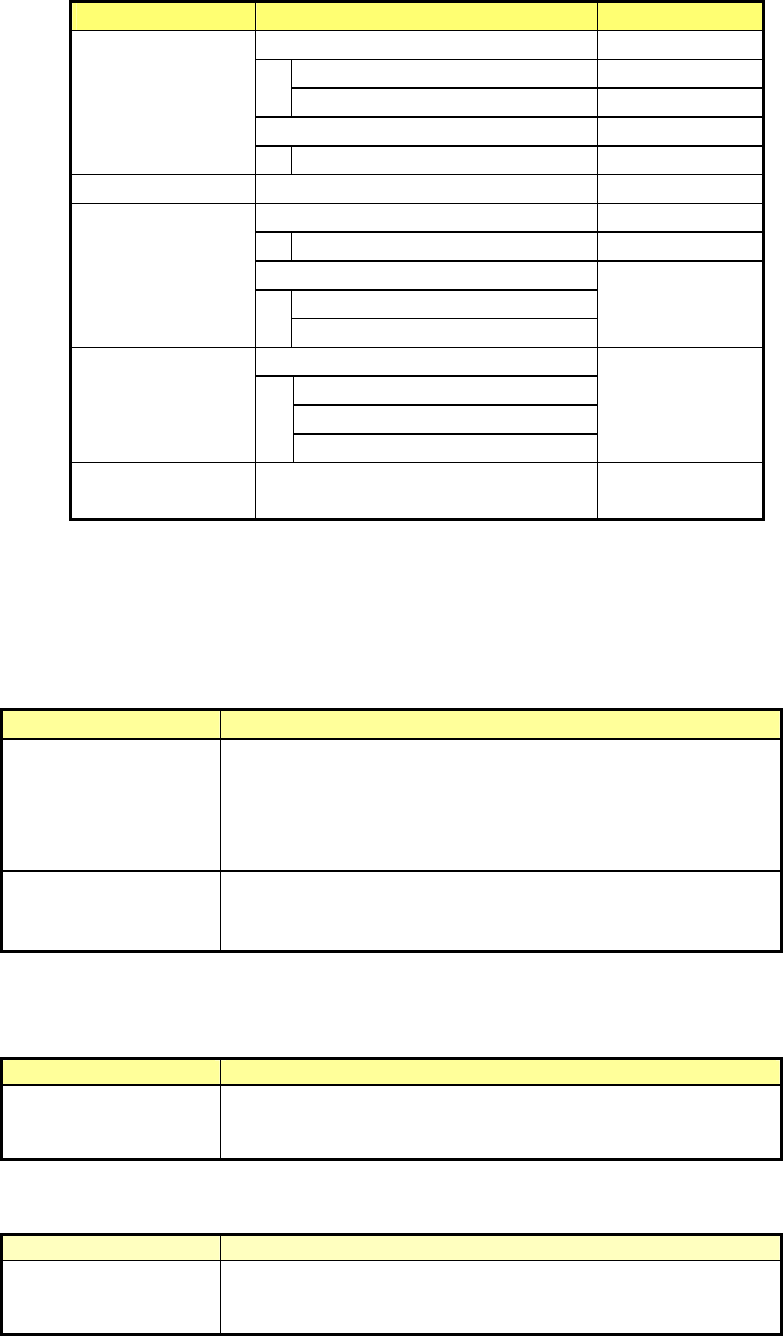
(2) 元件类型本身的测量项目限制
因元件数据的元件类型不同,测量项目会受到下列限制。
编号
元件类型
定中心
方式
测量项目
元件尺寸
吸取真空
压力
激光
高度
引脚
信息
CDS
高度
纵横 高度
1
方形芯片 激光 ○ ○ ○ ○
2
圆筒形芯片 激光 ○ ○ ○ ○
3
铝电解电容
激光 ○ ○ ○
图像 ○ ○ ○
4 GaAsFET
激光 ○ ○ ○
图像 ○ ○ ○
5 SOT
激光 ○ ○ ○ ○
6 SOP
激光 △ ○ ○ ○
图像 ○*1 ○ ○ ○*1 ○
7 SOJ
激光 ○ ○ ○
图像 ○ ○ ○
8 QFP
激光 △ ○ ○ ○
图像 ○*1 ○ ○ ○*1 ○
9 PLCC(QFJ)
激光 ○ ○ ○
图像 ○ ○ ○
10 PQFP(BQFP)
激光 △ ○ ○ ○
图像 ○*1 ○ ○ ○*1 ○
11 TSOP
激光 △ ○ ○ ○
图像 ○*1 ○ ○ ○*1 ○
12 TSOP2
激光 △ ○ ○ ○
图像 ○*1 ○ ○ ○*1 ○
13 BGA
激光 ○ ○ ○
图像 ○ ○ ○
14
网络电阻 激光 ○ ○ ○
15
微调电容器 激光 ○ ○ ○
16
单向引脚连接器
激光 ○ ○ ○ ○*2
图像 ○ ○ ○*1, *2 ○
17
J 引脚插座
激光 ○ ○ ○
图像 ○ ○ ○
18
鸥翼形插座
激光 ○ ○ ○
图像 ○ ○ ○