SP1_Introduction(Chi_Ver3).pdf - 第76页
在线预览 SP1_Introduction(Chi_Ver3).pdf PDF 文档。
4-7
运转操作部
Camera → Stage → Squeegee → Conveyor → Camera…。
◄► ▲ 键
指示各轴的移动方向或对角线方向。其动作会根据Mode、Object及 Axis 1/2的选
择结果而不同。
选择Mode=Jog、Object = Camera、Axis 1=XY时
▲ :往 +Y方向移动视觉拱架。
► :往 +X方向移动视觉拱架。
:往 -Y方向移动视觉拱架。
◄ :往 -X方向移动视觉拱架。
选择Mode=Jog、Object = Squeegee、Axis 2=ZF时
▲ :使正面刮片朝+Z方向上升。
:使正面刮片朝-Z方向下将。
选择Mode=Jog、Object = Conveyor、Axis 1=Shuttle、Axis 2=Entry时
▲ :往 +Y方向移动Entry巡回台(朝背面)。
► :往 +Y方向移动输送带正面框架以减小输送带宽度。
:往 -Y方向移
动Entry巡回台(朝正面)。
◄ :往 -Y方向移动输送带正面框架以增加输送带宽度。
示教盒非激活键
单击该键时、即使利用鼠标单击 SPVision窗口、示教盒功能也会处于非激活状
态。
5-1
传感器的功能
第5章. 传感器的功能
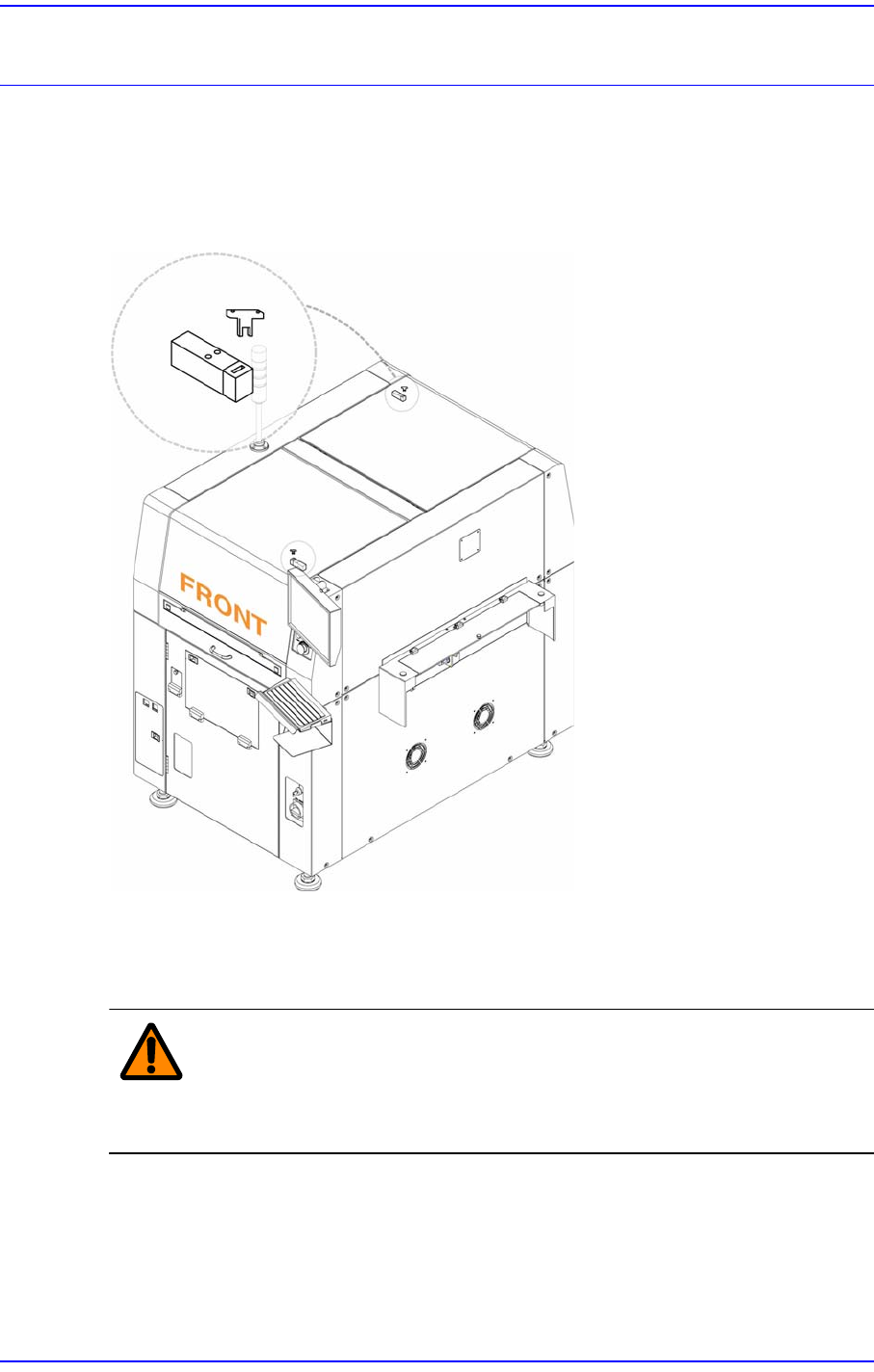
5.1. 护门开关
本设备上装载了可以检测出正面护门与背面护门开闭状态的护门 (Door)开关。
图
5.1
护门开关
在本设备的运转过程(Run状态)中打开护门时、将启动护门开关而转换到紧急停机
状态。关闭护门则解除紧急停机状态。需要在该状态下重新开始运转时、按下操作
面板上的“READY”按键后按下“START”按键。
警告 人为地解除护门的安全传感器时、即使动作过程中护门被打开设
备也不会停止而可能造成伤害。绝对禁止人为地解除护门安全传
感器。