Spec of AX-3 AX-5 June 2005 LR - 第12页
Each placement head has its own board alignment camera. The board alignment camera is used for fiducial and artwork alignment. The board alignment camera is also used for the position detection of feeder trolleys, toolbi…
Each placement robot is fitted with a placement head. The placement head
executes the following tasks:
Z-movement
Rz-movement
Component alignment
Board alignment
Force sensing and control
Trolley and feeder detection
Toolbit exchange unit detection
Board warpage correction
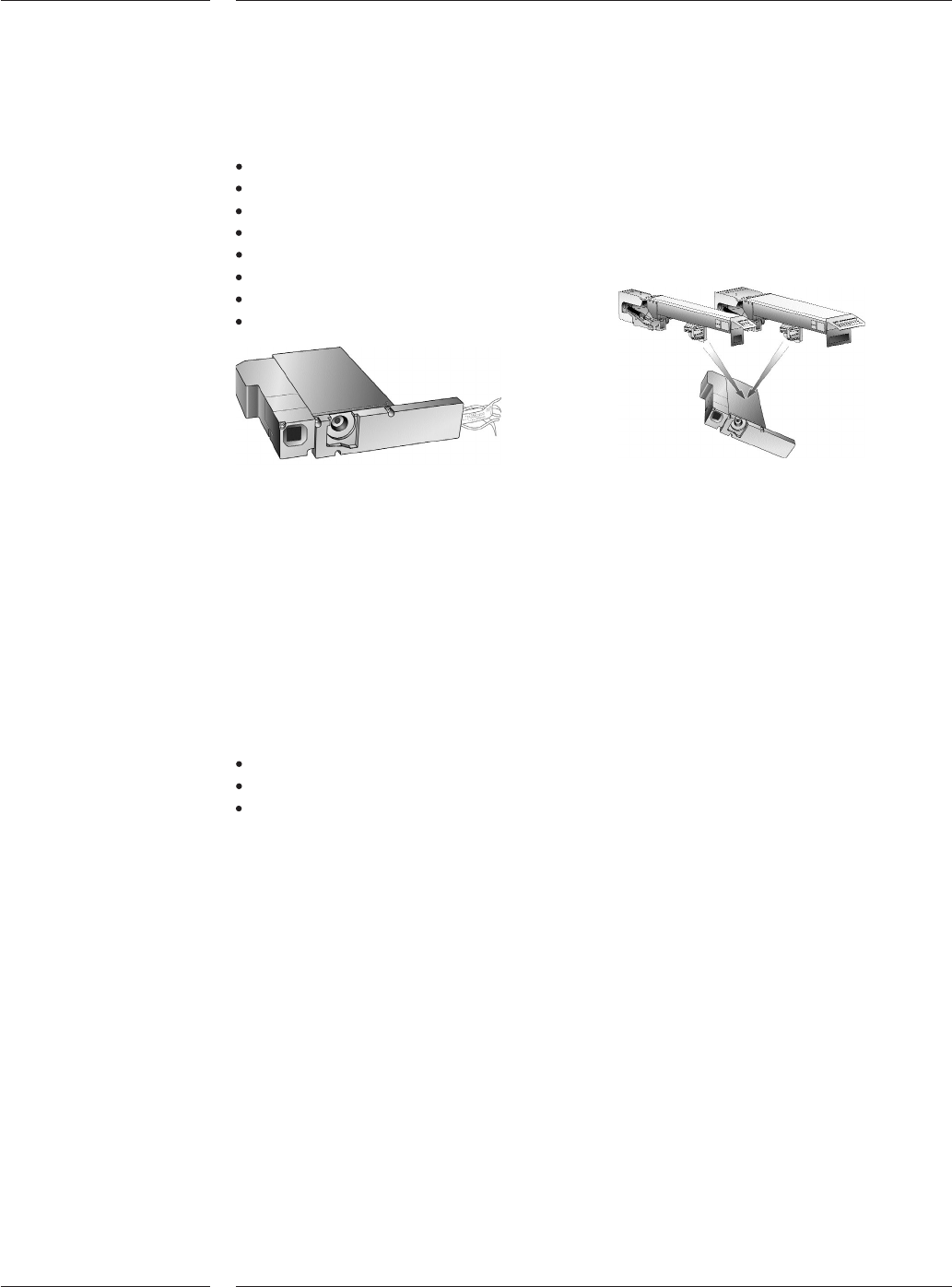
Placement head
The Z-stroke uses a linear motor. This linear motor controls the pickup force,
placement Z-speed and placement dwell and impact force.
Board warpage correction
When a board enters the placement area, every placement head measures the
impact position and calculates the appropriate Z-height to correct for any applicable
board warpage. This adaptive Z-height feature enables that the appropriate
placement dwell force and impact force is well within the tolerance of process
requirements.
AX Placement head force specifications
Placement force range 2N to 8N, lower forces with restrictions
Programmable placement force stepsize 0.1N
Placement force control by linear motor current servo loop
2.5 Placement
head
Figure 3
Contents
9 of 34
Each placement head has its own board alignment camera. The board alignment
camera is used for fiducial and artwork alignment. The board alignment camera is
also used for the position detection of feeder trolleys, toolbit exchange unit, dump
bin, component vision camera and badmark sensing.
Board alignment camera
Camera Field of View 8.6 x 6.8mm
Camera pixels 1024 x 768
Camera pixel resolution 8.4 µm
Illumination Bright field & dark field
Fiducial types All regular types with a contrast level of >30%
Fiducial shape size Fiducial shape size >0.3mm, <3.0 mm
Free zone around fiducial No features allowed within 0.1mm, no look-a-likes
within 2.6mm from fiducial
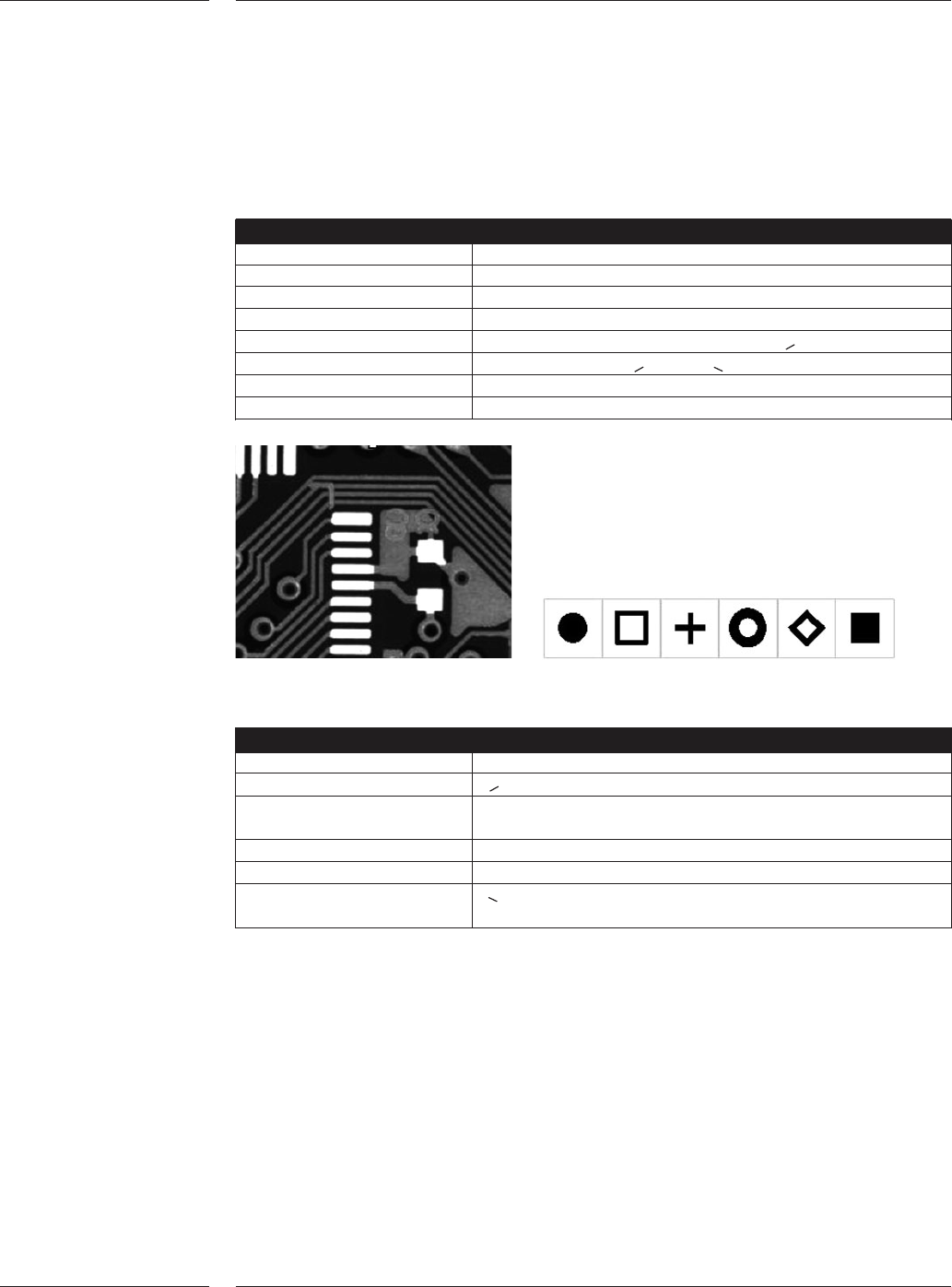
Examples of artwork and typical fiducials
Badmark sensing
Bad mark type Black or whyte dot, or fiducial shape
Size >φ 1mm
Color Bad marks can be dark in a light background or light in
a dark background
Contrast At least 30 %
Badmark levels 3
Number of bad marks <2048
per board
2.6 Board
alignment
Figure 4
Features
10 of 34
2.7 Component
alignment
2.7.1 Component
laser
2.7.2 Vision
alignment
Figure 5
Figure 6
Contents
11 of 34
Components up to 45 x 45mm can be aligned with a component vision camera that
optionally can be fitted behind the board transport and underneath a standard
placement robot. Components up to 17.5 x 17.5mm can be aligned with "on the
fly" laser alignment that is fitted on each placement head.
This allows a standard placement robot to alternate the alignment method without
the need to change the configuration of the machine during production.
A component laser module is part of each placement head. The component laser is
used for component presence check, component alignment, nozzle type identifica-
tion and nozzle verification.
Laser alignment
Component size 0.4 x 0.2mm (01005) to 17.5 x 17.5mm
(diagonal 24.75mm, < (Length
2
+ width
2
))
Length & width including leads
Height: 6.3mm (10.75 with restrictions)
Min. component thickness 0.130mm
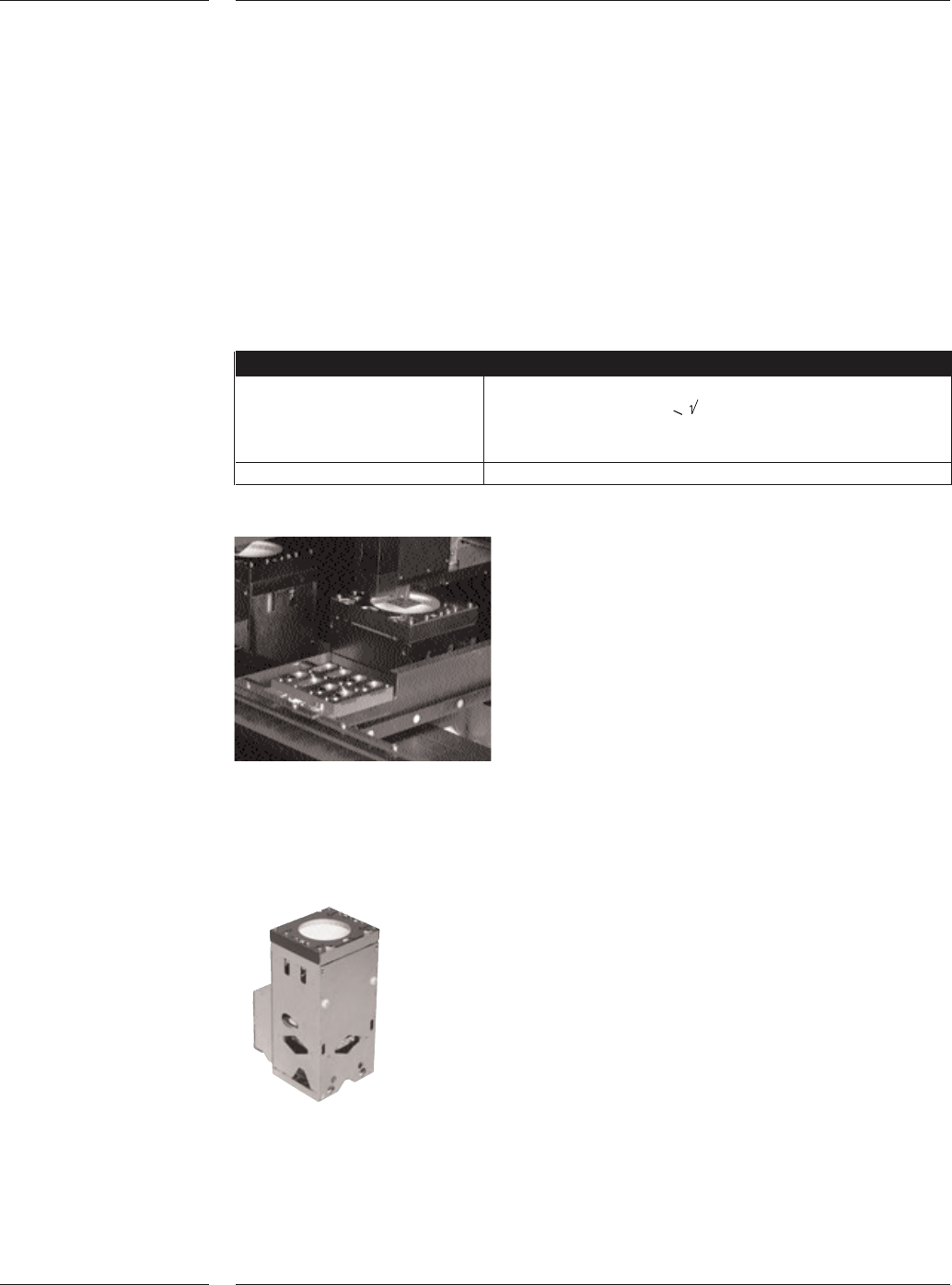
Vision alignment
Vision alignment is used for alignment of components on leads, edges or bumps.
Vision alignment is achieved by moving the component above the lens of an
upward-facing vision camera.
Alignment takes place at Z=0, which is the board level height.
Three light sources (dark field, midfield and bright field) ensure
sufficient contrast between the component (leads) and the
background. The illumination intensity is automatically chosen
based upon the reflectivity of the respective components. The
vision camera can determine the position of the component
with respect to a reference plate. The deviations, together with
the fiducial alignment values, will be used to determine the
correct placement position.
AX Component Vision camera