TR7700QE_Software_ch-v3.0_20180328 - 第143页
Test Research, Inc. TR7700Q E User Gu ide – S o f twar e 120 圖 195 : Void 框參數設定畫 面 – Blob Mode 硬體設定 相機:顯示目前檢測框 所在的相機位置。 燈光:選擇使用均勻光 、錫形燈源、低角 度燈源或者白燈, 預設為白燈。 基本參數與其對應的合格 標準 3D 模式:開啟或關閉 3D 模式。 − 顯示模式:選擇 使用 2 D Im …
Test Research, Inc.
TR7700QE User Guide–Software 119
圖 194:Void 框參數設定畫面 – 與焊盤連動設定 – 限制在焊盤範圍內
3.6.10.2 Blob Mode
1) 用途:利用區塊數量來檢查用來檢測金手指表面刮傷、髒污與積體電路翹腳。
2) 檢測原理:
1.灰階模式:計算所設定的灰階找出的區塊是否符合條件。
2.色彩模式:計算所選取的色彩找出的區塊是否符合條件。
3) 參數畫面與說明:
Test Research, Inc.
TR7700QE User Guide–Software 120
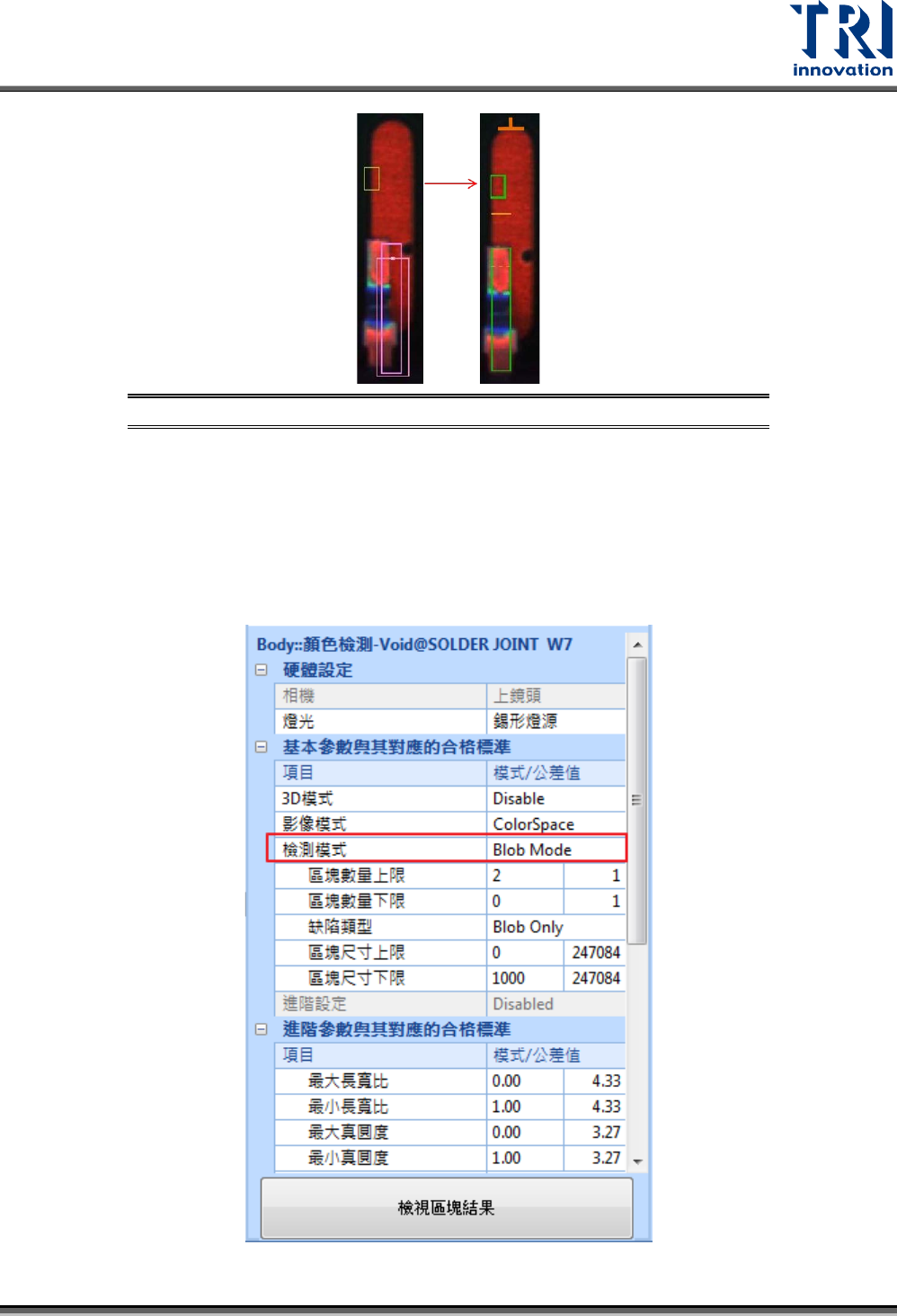
圖 195:Void 框參數設定畫面 – Blob Mode
硬體設定
相機:顯示目前檢測框所在的相機位置。
燈光:選擇使用均勻光、錫形燈源、低角度燈源或者白燈,預設為白燈。
基本參數與其對應的合格標準
3D 模式:開啟或關閉 3D 模式。
− 顯示模式:選擇使用 2D Image 或者 3D HeightMap。
影像模式:選擇影像的比對方式為權重法、色彩空間法或 RGB 法,預設為色彩空間法。
區塊數量上/下限:設定區塊數量的上限與下限。
缺陷類型:可選擇 “Blob only” 、 “Hole only”或 “Blob&hole”。
備註:
Blob 的定義:所選擇色彩連結在一起所產生的區塊。
Hole 的定義:被所選擇顏色完全包圍的黑色區塊。
區塊/孔洞尺寸上/下限:設定區塊或孔洞面積的上/下限,單位為µm
2
。
進階參數與其相對應的合格標準
最大/最小長寬比:設定長寬比的上限與下限允差,只有長寬比介於此範圍內才列入計算。
最小需大於 1。
最大/最小真圓度:設定真圓度的上限與下限允差。
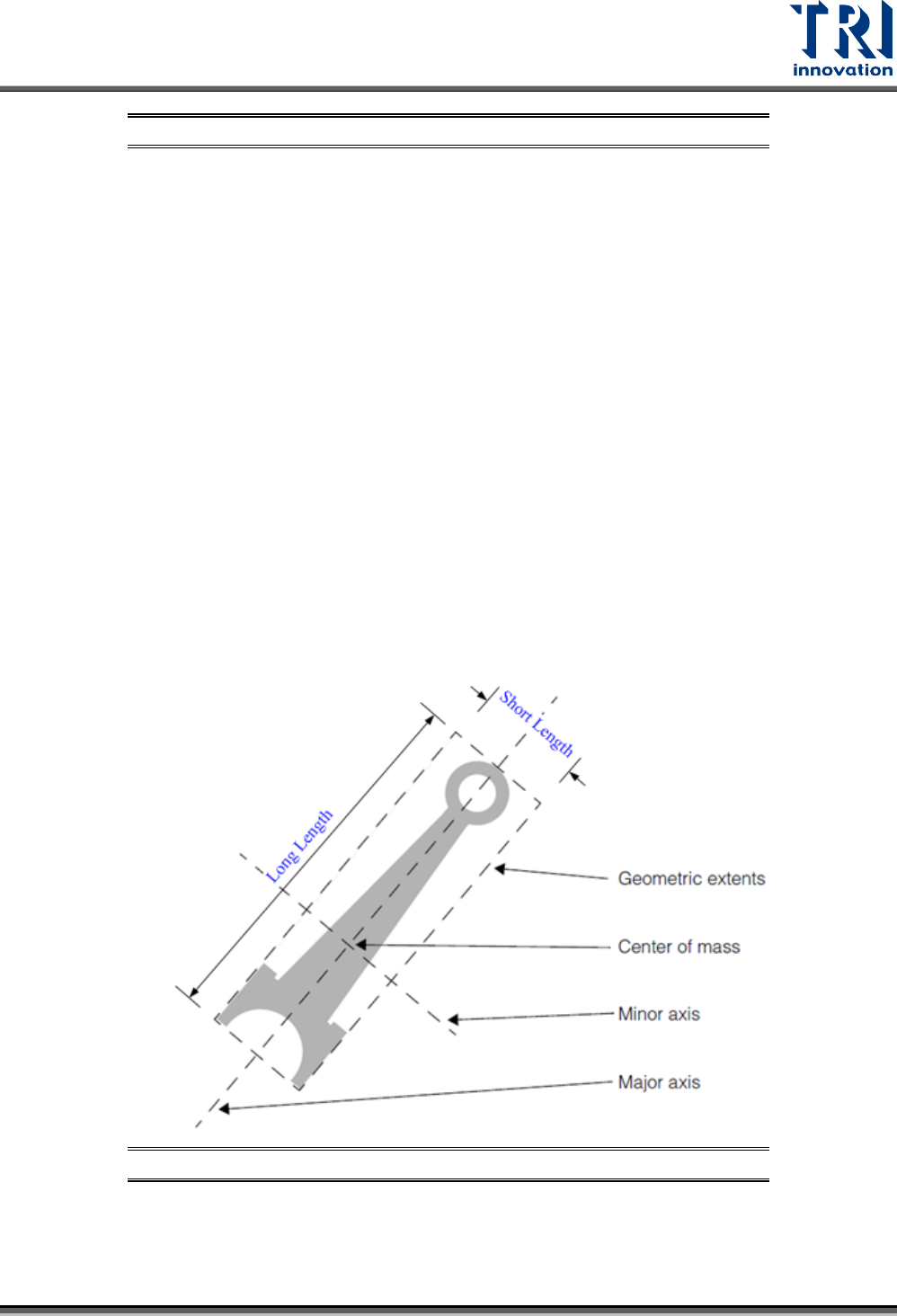
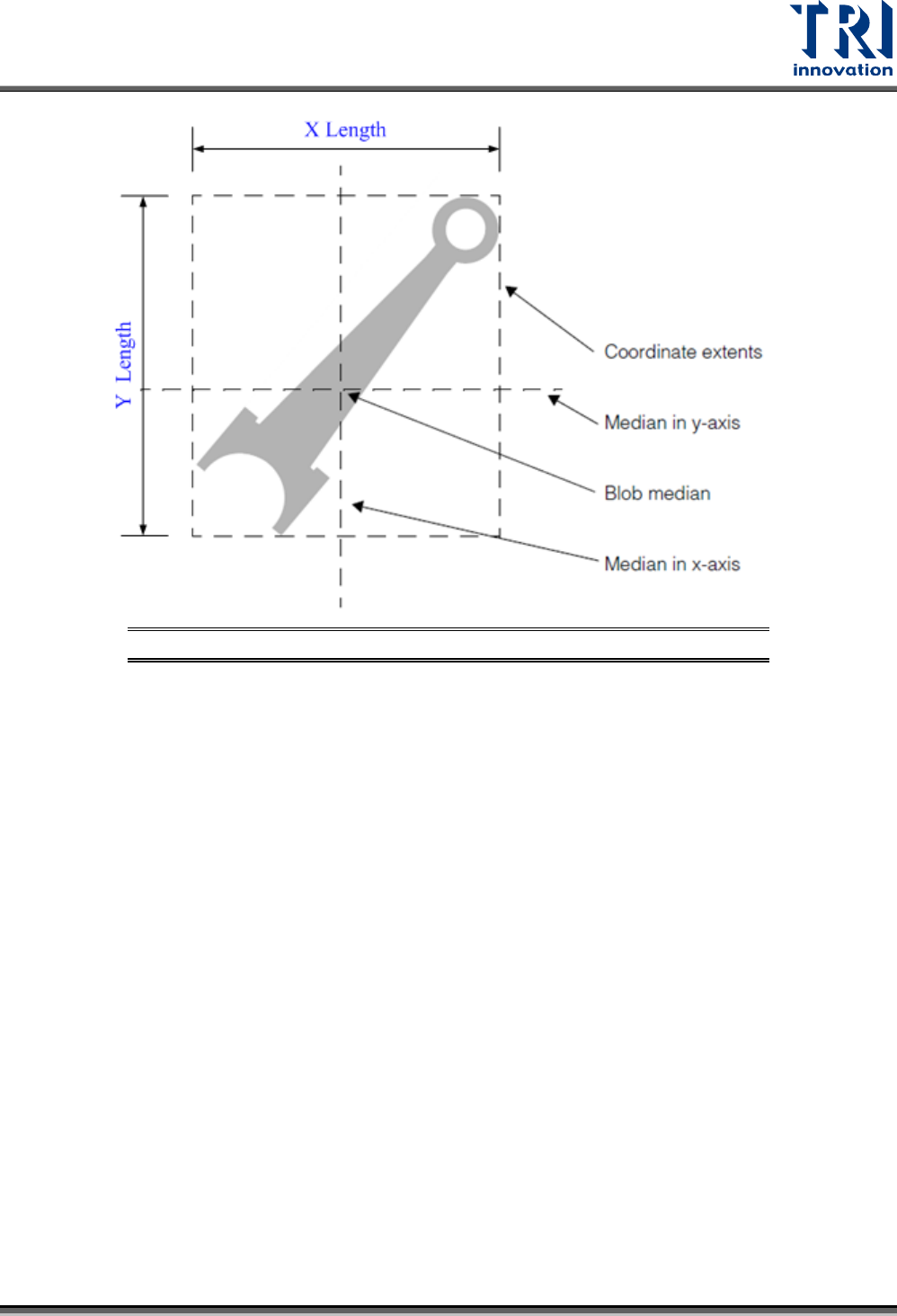
長度模式:計算區塊的檢測標準,可選擇 “Long length”、 “Short length” 、 “X length” 、
“Y length”或”Disabled”。
備註:各選項參數定義如下圖
圖 196:Void 框參數設定 – 長度模式“Long length”與“Short length”定義
Test Research, Inc.
TR7700QE User Guide–Software 121
圖 197:Void 框參數設定 – 長度模式“X length”與“Y length”定義
邊緣檢查:
− 光源選擇:選擇過濾邊緣所使用的光源。
− 強度臨界值:設定邊緣灰階變化臨界值。若區塊中的邊緣強度小於此值,將會被過濾
掉。
自動填補孔洞:檢測時會將所選色彩所包含範圍中的孔洞自動填補,以提升檢測能力。
形態濾波:用來濾除干擾與雜訊,可應用在二值化影像或灰階影像(暈化效果)。預設為
Disabled,越下面的選項,其過濾效果越強,對影像的破壞程度也越大。
模糊濾波:與形態濾波類似,也是用來濾除雜訊,可應用在二值化影像或灰階影像。此功
能對於胡椒鹽類型雜訊的效果特別好。
區塊濾波:依照指定的區塊數量進行過濾。此功能僅當二值化開啟時才會生效,預設為
0(關閉)。輸入 1 時, 僅會保留最大的一個區塊; 輸入 2 時, 僅會保留最大的兩個區塊,以此
類推。
框邊區塊濾除:濾除區塊中心至檢測框邊緣小於設定畫素距離的區塊。
區塊群組:將距離小於群組距離的區塊合併。
− 群組距離:設定合併為同個區塊的群組距離。
隨著定位檢測框旋轉:檢測框除了會隨著定位檢測框(有代料影像的檢測框,如 PatMatch、
CorMatch 框...等)補償 XY 的位移量,也會進行角度旋轉的補償動作。
與焊盤連動:
− 移動到焊盤尾端:當焊盤尾端間距設為 0 即表示貼齊焊盤的末端,增加焊盤尾端間距
即分開檢測框到焊盤尾端的距離
− 移動到焊盤的中心軸:移動檢測框到與 Lead 框所設定焊盤中心共水平/垂直位置。
− 限制在焊盤範圍內:限制檢測框落在 Lead 框所設定的焊盤的範圍內。